 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReinforcement Learning-Based Neuroadaptive Control of Robotic Manipulators under Deferred Constraints
Mar 18, 2025This paper presents a reinforcement learning-based neuroadaptive control framework for robotic manipulators operating under deferred constraints. The proposed approach improves traditional barrier Lyapunov functions by introducing a smooth constraint enforcement mechanism that offers two key advantages: (i) it minimizes control effort in unconstrained regions and progressively increases it near constraints, improving energy efficiency, and (ii) it enables gradual constraint activation through a prescribed-time shifting function, allowing safe operation even when initial conditions violate constraints. To address system uncertainties and improve adaptability, an actor-critic reinforcement learning framework is employed. The critic network estimates the value function, while the actor network learns an optimal control policy in real time, enabling adaptive constraint handling without requiring explicit system modeling. Lyapunov-based stability analysis guarantees the boundedness of all closed-loop signals. The effectiveness of the proposed method is validated through numerical simulations.
Hierarchical Performance-Based Design Optimization Framework for Soft Grippers
Nov 09, 2024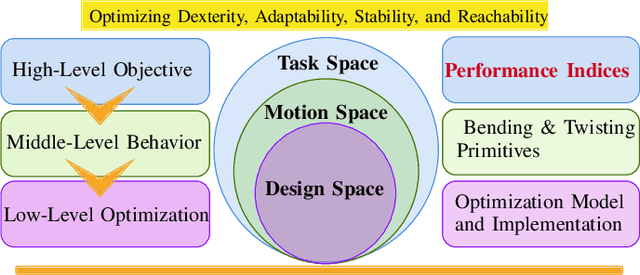
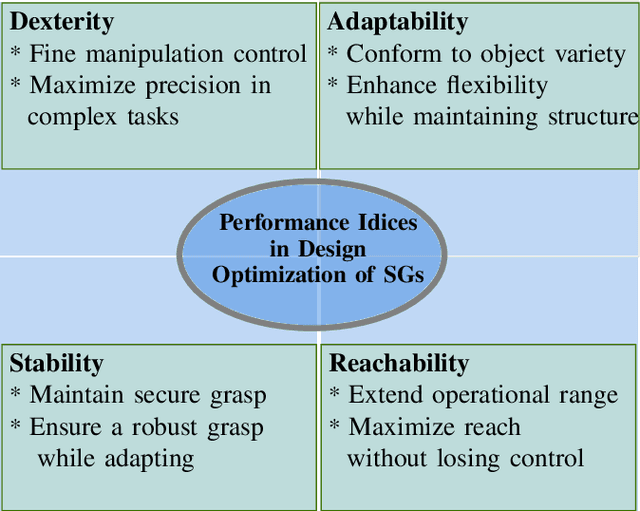
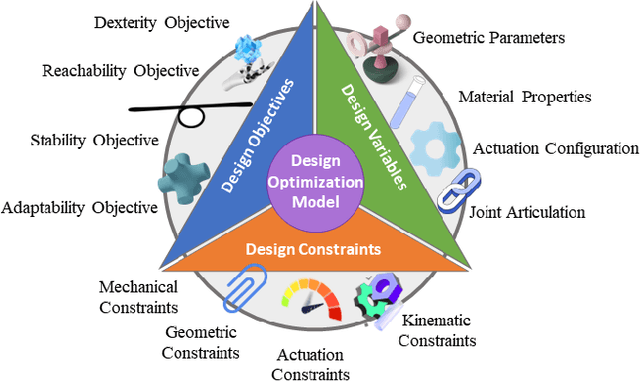
This paper presents a hierarchical, performance-based framework for the design optimization of multi-fingered soft grippers. To address the need for systematically defined performance indices, the framework structures the optimization process into three integrated layers: Task Space, Motion Space, and Design Space. In the Task Space, performance indices are defined as core objectives, while the Motion Space interprets these into specific movement primitives. Finally, the Design Space applies parametric and topological optimization techniques to refine the geometry and material distribution of the system, achieving a balanced design across key performance metrics. The framework's layered structure enhances SG design, ensuring balanced performance and scalability for complex tasks and contributing to broader advancements in soft robotics.
Synthetic Dataset Generation and Learning From Demonstration Applied to Industrial Manipulation
Mar 30, 2024The aim of this study is to investigate an automated industrial manipulation pipeline, where assembly tasks can be flexibly adapted to production without the need for a robotic expert, both for the vision system and the robot program. The objective of this study is first, to develop a synthetic-dataset-generation pipeline with a special focus on industrial parts, and second, to use Learning-from-Demonstration (LfD) methods to replace manual robot programming, so that a non-robotic expert/process engineer can introduce a new manipulation task by teaching it to the robot.
Nussbaum Function Based Approach for Tracking Control of Robot Manipulators
Mar 01, 2024This paper introduces a novel Nussbaum function-based PID control for robotic manipulators. The integration of the Nussbaum function into the PID framework provides a solution with a simple structure that effectively tackles the challenge of unknown control directions. Stability is achieved through a combination of neural network-based estimation and Lyapunov analysis, facilitating automatic gain adjustment without the need for system dynamics. Our approach offers a gain determination with minimum parameter requirements, significantly reducing the complexity and enhancing the efficiency of robotic manipulator control. The paper guarantees that all signals within the closed-loop system remain bounded. Lastly, numerical simulations validate the theoretical framework, confirming the effectiveness of the proposed control strategy in enhancing robotic manipulator control.
A Lightweight Universal Gripper with Low Activation Force for Aerial Grasping
Aug 23, 2022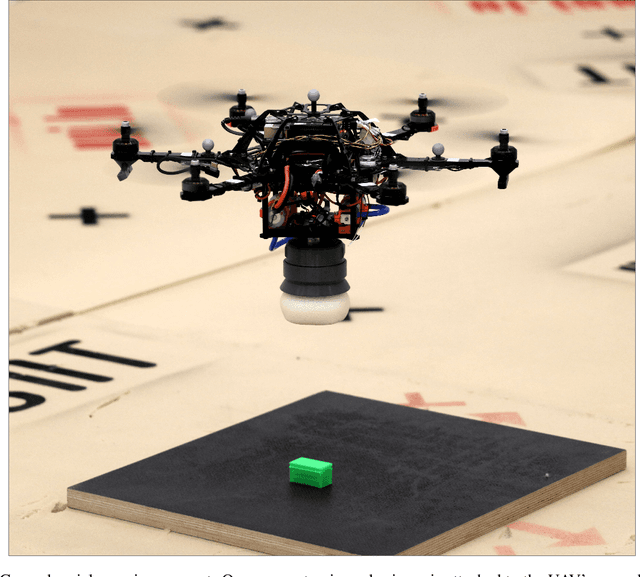
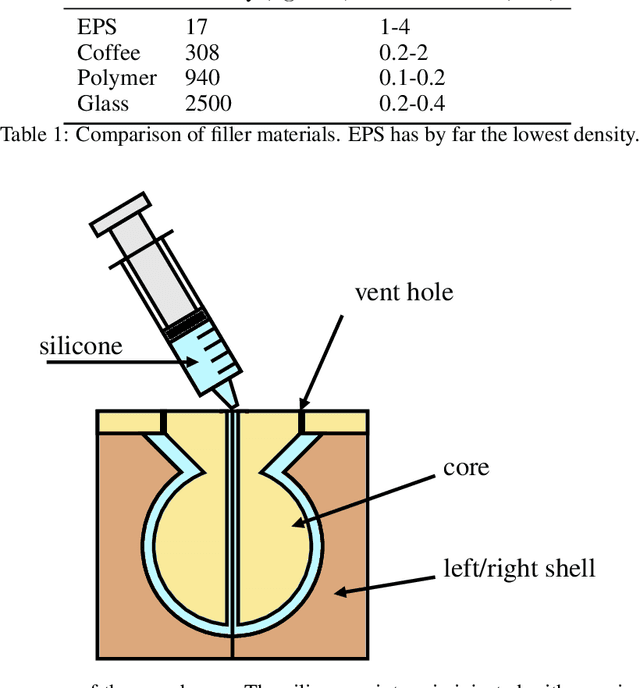
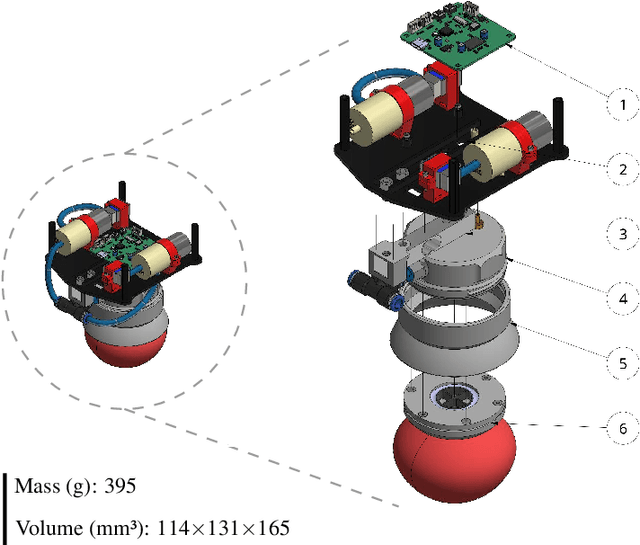
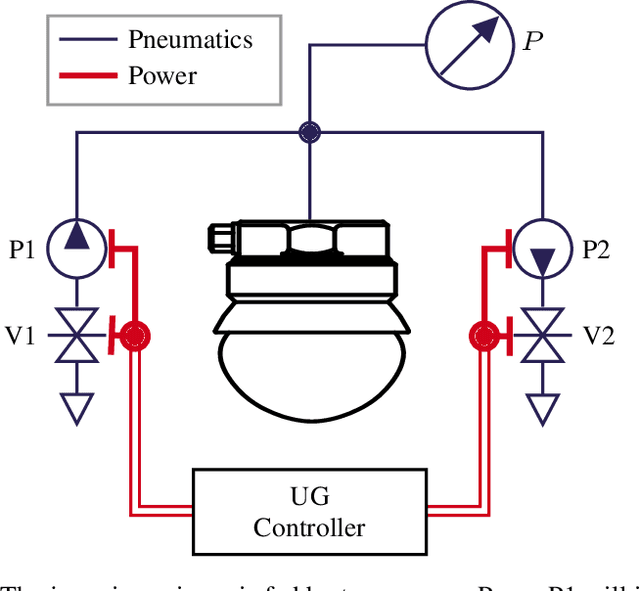
Soft robotic grippers have numerous advantages that address challenges in dynamic aerial grasping. Typical multi-fingered soft grippers recently showcased for aerial grasping are highly dependent on the direction of the target object for successful grasping. This study pushes the boundaries of dynamic aerial grasping by developing an omnidirectional system for autonomous aerial manipulation. In particular, the paper investigates the design, fabrication, and experimental verification of a novel, highly integrated, modular, sensor-rich, universal jamming gripper specifically designed for aerial applications. Leveraging recent developments in particle jamming and soft granular materials, the presented gripper produces a substantial holding force while being very lightweight, energy-efficient and only requiring a low activation force. We show that the holding force can be improved by up to 50% by adding an additive to the membrane's silicone mixture. The experiments show that our lightweight gripper can develop up to 15N of holding force with an activation force as low as 2.5N, even without geometric interlocking. Finally, a pick and release task is performed under real-world conditions by mounting the gripper onto a multi-copter. The developed aerial grasping system features many useful properties, such as resilience and robustness to collisions and the inherent passive compliance which decouples the UAV from the environment.