 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobust Graph Matching through Semantic Relationship Generation for SLAM
Apr 28, 2026Graph-based representations such as Scene Graphs enable localization in structured indoor environments by matching a locally observed graph, constructed from sensor data, to a prior map. This process is particularly challenging in environments with repetitive or symmetric layouts, where structural cues alone are often insufficient to resolve ambiguities. We propose a semantic-enhanced graph matching approach that explicitly models relations between detected objects and structural elements, such as rooms and wall planes. Objects are detected from RGB-D data and integrated into the graph, and their relations to structural elements are exploited to filter candidate correspondences prior to geometric verification, significantly reducing ambiguity and search complexity. The proposed method is integrated within the iS-Graphs framework and evaluated in synthetic and simulated environments. Results show that semantic relations significantly reduce the number of candidate matches, improve computational efficiency, and enable faster convergence, particularly in symmetric scenarios where purely geometric approaches fail.
Situationally-aware Path Planning Exploiting 3D Scene Graphs
Aug 08, 20253D Scene Graphs integrate both metric and semantic information, yet their structure remains underutilized for improving path planning efficiency and interpretability. In this work, we present S-Path, a situationally-aware path planner that leverages the metric-semantic structure of indoor 3D Scene Graphs to significantly enhance planning efficiency. S-Path follows a two-stage process: it first performs a search over a semantic graph derived from the scene graph to yield a human-understandable high-level path. This also identifies relevant regions for planning, which later allows the decomposition of the problem into smaller, independent subproblems that can be solved in parallel. We also introduce a replanning mechanism that, in the event of an infeasible path, reuses information from previously solved subproblems to update semantic heuristics and prioritize reuse to further improve the efficiency of future planning attempts. Extensive experiments on both real-world and simulated environments show that S-Path achieves average reductions of 5.7x in planning time while maintaining comparable path optimality to classical sampling-based planners and surpassing them in complex scenarios, making it an efficient and interpretable path planner for environments represented by indoor 3D Scene Graphs.
Hardware, Algorithms, and Applications of the Neuromorphic Vision Sensor: a Review
Apr 11, 2025Neuromorphic, or event, cameras represent a transformation in the classical approach to visual sensing encodes detected instantaneous per-pixel illumination changes into an asynchronous stream of event packets. Their novelty compared to standard cameras lies in the transition from capturing full picture frames at fixed time intervals to a sparse data format which, with its distinctive qualities, offers potential improvements in various applications. However, these advantages come at the cost of reinventing algorithmic procedures or adapting them to effectively process the new data format. In this survey, we systematically examine neuromorphic vision along three main dimensions. First, we highlight the technological evolution and distinctive hardware features of neuromorphic cameras from their inception to recent models. Second, we review image processing algorithms developed explicitly for event-based data, covering key works on feature detection, tracking, and optical flow -which form the basis for analyzing image elements and transformations -as well as depth and pose estimation or object recognition, which interpret more complex scene structures and components. These techniques, drawn from classical computer vision and modern data-driven approaches, are examined to illustrate the breadth of applications for event-based cameras. Third, we present practical application case studies demonstrating how event cameras have been successfully used across various industries and scenarios. Finally, we analyze the challenges limiting widespread adoption, identify significant research gaps compared to standard imaging techniques, and outline promising future directions and opportunities that neuromorphic vision offers.
Constraint-Based Modeling of Dynamic Entities in 3D Scene Graphs for Robust SLAM
Mar 03, 2025Autonomous robots depend crucially on their ability to perceive and process information from dynamic, ever-changing environments. Traditional simultaneous localization and mapping (SLAM) approaches struggle to maintain consistent scene representations because of numerous moving objects, often treating dynamic elements as outliers rather than explicitly modeling them in the scene representation. In this paper, we present a novel hierarchical 3D scene graph-based SLAM framework that addresses the challenge of modeling and estimating the pose of dynamic objects and agents. We use fiducial markers to detect dynamic entities and to extract their attributes while improving keyframe selection and implementing new capabilities for dynamic entity mapping. We maintain a hierarchical representation where dynamic objects are registered in the SLAM graph and are constrained with robot keyframes and the floor level of the building with our novel entity-keyframe constraints and intra-entity constraints. By combining semantic and geometric constraints between dynamic entities and the environment, our system jointly optimizes the SLAM graph to estimate the pose of the robot and various dynamic agents and objects while maintaining an accurate map. Experimental evaluation demonstrates that our approach achieves a 27.57% reduction in pose estimation error compared to traditional methods and enables higher-level reasoning about scene dynamics.
Metric-Semantic Factor Graph Generation based on Graph Neural Networks
Sep 18, 2024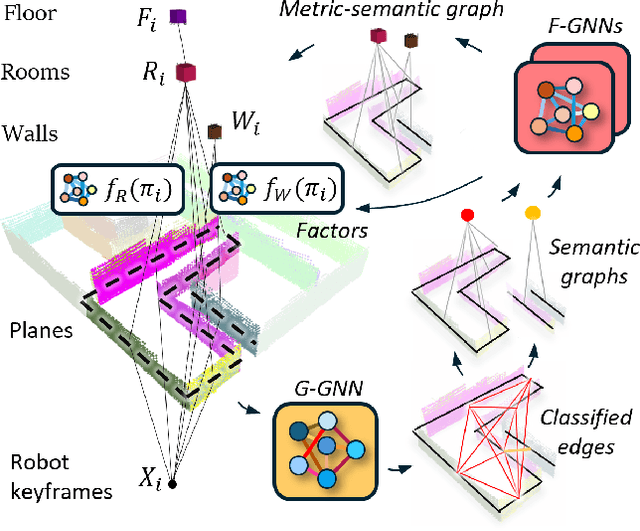
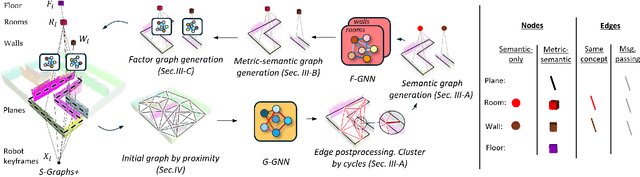
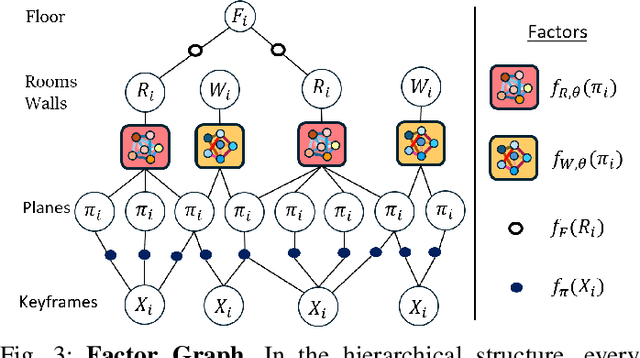
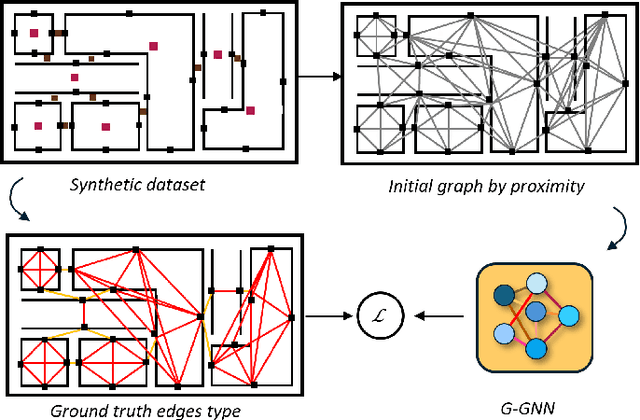
Understanding the relationships between geometric structures and semantic concepts is crucial for building accurate models of complex environments. In indoors, certain spatial constraints, such as the relative positioning of planes, remain consistent despite variations in layout. This paper explores how these invariant relationships can be captured in a graph SLAM framework by representing high-level concepts like rooms and walls, linking them to geometric elements like planes through an optimizable factor graph. Several efforts have tackled this issue with add-hoc solutions for each concept generation and with manually-defined factors. This paper proposes a novel method for metric-semantic factor graph generation which includes defining a semantic scene graph, integrating geometric information, and learning the interconnecting factors, all based on Graph Neural Networks (GNNs). An edge classification network (G-GNN) sorts the edges between planes into same room, same wall or none types. The resulting relations are clustered, generating a room or wall for each cluster. A second family of networks (F-GNN) infers the geometrical origin of the new nodes. The definition of the factors employs the same F-GNN used for the metric attribute of the generated nodes. Furthermore, share the new factor graph with the S-Graphs+ algorithm, extending its graph expressiveness and scene representation with the ultimate goal of improving the SLAM performance. The complexity of the environments is increased to N-plane rooms by training the networks on L-shaped rooms. The framework is evaluated in synthetic and simulated scenarios as no real datasets of the required complex layouts are available.
Real-time Localization and Mapping in Architectural Plans with Deviations
Aug 03, 2024Having prior knowledge of an environment boosts the localization and mapping accuracy of robots. Several approaches in the literature have utilized architectural plans in this regard. However, almost all of them overlook the deviations between actual as-built environments and as-planned architectural designs, introducing bias in the estimations. To address this issue, we present a novel localization and mapping method denoted as deviations-informed Situational Graphs or diS-Graphs that integrates prior knowledge from architectural plans even in the presence of deviations. It is based on Situational Graphs (S-Graphs) that merge geometric models of the environment with 3D scene graphs into a multi-layered jointly optimizable factor graph. Our diS-Graph extracts information from architectural plans by first modeling them as a hierarchical factor graph, which we will call an Architectural Graph (A-Graph). While the robot explores the real environment, it estimates an S-Graph from its onboard sensors. We then use a novel matching algorithm to register the A-Graph and S-Graph in the same reference, and merge both of them with an explicit model of deviations. Finally, an alternating graph optimization strategy allows simultaneous global localization and mapping, as well as deviation estimation between both the A-Graph and the S-Graph. We perform several experiments in simulated and real datasets in the presence of deviations. On average, our diS-Graphs outperforms the baselines by a margin of approximately 43% in simulated environments and by 7% in real environments, while being able to estimate deviations up to 35 cm and 15 degrees.
Better Situational Graphs by Inferring High-level Semantic-Relational Concepts
Sep 30, 2023Recent works on SLAM extend their pose graphs with higher-level semantic concepts exploiting relationships between them, to provide, not only a richer representation of the situation/environment but also to improve the accuracy of its estimation. Concretely, our previous work, Situational Graphs (S-Graphs), a pioneer in jointly leveraging semantic relationships in the factor optimization process, relies on semantic entities such as wall surfaces and rooms, whose relationship is mathematically defined. Nevertheless, excerpting these high-level concepts relying exclusively on the lower-level factor-graph remains a challenge and it is currently done with ad-hoc algorithms, which limits its capability to include new semantic-relational concepts. To overcome this limitation, in this work, we propose a Graph Neural Network (GNN) for learning high-level semantic-relational concepts that can be inferred from the low-level factor graph. We have demonstrated that we can infer room entities and their relationship to the mapped wall surfaces, more accurately and more computationally efficient than the baseline algorithm. Additionally, to demonstrate the versatility of our method, we provide a new semantic concept, i.e. wall, and its relationship with its wall surfaces. Our proposed method has been integrated into S-Graphs+, and it has been validated in both simulated and real datasets. A docker container with our software will be made available to the scientific community.
Graph-based Global Robot Simultaneous Localization and Mapping using Architectural Plans
May 16, 2023In this paper, we propose a solution for graph-based global robot simultaneous localization and mapping (SLAM) using architectural plans. Before the start of the robot operation, the previously available architectural plan of the building is converted into our proposed architectural graph (A-Graph). When the robot starts its operation, it uses its onboard LIDAR and odometry to carry out an online SLAM relying on our situational graph (S-Graph), which includes both, a representation of the environment with multiple levels of abstractions, such as walls or rooms, and their relationships, as well as the robot poses with their associated keyframes. Our novel graph-to-graph matching method is used to relate the aforementioned S-Graph and A-Graph, which are aligned and merged, resulting in our novel informed Situational Graph (iS-Graph). Our iS-Graph not only provides graph-based global robot localization, but it extends the graph-based SLAM capabilities of the S-Graph by incorporating into it the prior knowledge of the environment existing in the architectural plan
Graph-based Global Robot Localization Informing Situational Graphs with Architectural Graphs
Mar 03, 2023In this paper, we propose a solution for legged robot localization using architectural plans. Our specific contributions towards this goal are several. Firstly, we develop a method for converting the plan of a building into what we denote as an architectural graph (A-Graph). When the robot starts moving in an environment, we assume it has no knowledge about it, and it estimates an online situational graph representation (S-Graph) of its surroundings. We develop a novel graph-to-graph matching method, in order to relate the S-Graph estimated online from the robot sensors and the A-Graph extracted from the building plans. Note the challenge in this, as the S-Graph may show a partial view of the full A-Graph, their nodes are heterogeneous and their reference frames are different. After the matching, both graphs are aligned and merged, resulting in what we denote as an informed Situational Graph (iS-Graph), with which we achieve global robot localization and exploitation of prior knowledge from the building plans. Our experiments show that our pipeline shows a higher robustness and a significantly lower pose error than several LiDAR localization baselines.