 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFlocking behavior for dynamic and complex swarm structures
Jan 29, 2026Maintaining the formation of complex structures with multiple UAVs and achieving complex trajectories remains a major challenge. This work presents an algorithm for implementing the flocking behavior of UAVs based on the concept of Virtual Centroid to easily develop a structure for the flock. The approach builds on the classical virtual-based behavior, providing a theoretical framework for incorporating enhancements to dynamically control both the number of agents and the formation of the structure. Simulation tests and real-world experiments were conducted, demonstrating its simplicity even with complex formations and complex trajectories.
A Methodology for Designing Knowledge-Driven Missions for Robots
Jan 28, 2026This paper presents a comprehensive methodology for implementing knowledge graphs in ROS 2 systems, aiming to enhance the efficiency and intelligence of autonomous robotic missions. The methodology encompasses several key steps: defining initial and target conditions, structuring tasks and subtasks, planning their sequence, representing task-related data in a knowledge graph, and designing the mission using a high-level language. Each step builds on the previous one to ensure a cohesive process from initial setup to final execution. A practical implementation within the Aerostack2 framework is demonstrated through a simulated search and rescue mission in a Gazebo environment, where drones autonomously locate a target. This implementation highlights the effectiveness of the methodology in improving decision-making and mission performance by leveraging knowledge graphs.
Human Interaction for Collaborative Semantic SLAM using Extended Reality
Sep 18, 2025Semantic SLAM (Simultaneous Localization and Mapping) systems enrich robot maps with structural and semantic information, enabling robots to operate more effectively in complex environments. However, these systems struggle in real-world scenarios with occlusions, incomplete data, or ambiguous geometries, as they cannot fully leverage the higher-level spatial and semantic knowledge humans naturally apply. We introduce HICS-SLAM, a Human-in-the-Loop semantic SLAM framework that uses a shared extended reality environment for real-time collaboration. The system allows human operators to directly interact with and visualize the robot's 3D scene graph, and add high-level semantic concepts (e.g., rooms or structural entities) into the mapping process. We propose a graph-based semantic fusion methodology that integrates these human interventions with robot perception, enabling scalable collaboration for enhanced situational awareness. Experimental evaluations on real-world construction site datasets demonstrate improvements in room detection accuracy, map precision, and semantic completeness compared to automated baselines, demonstrating both the effectiveness of the approach and its potential for future extensions.
BIM Informed Visual SLAM for Construction Monitoring
Sep 17, 2025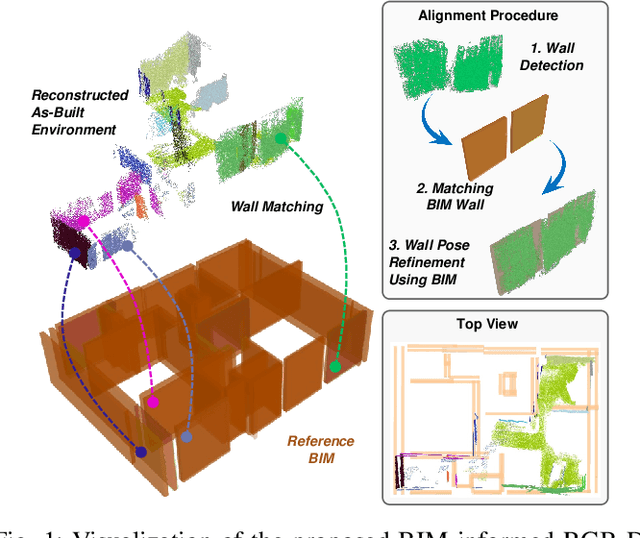

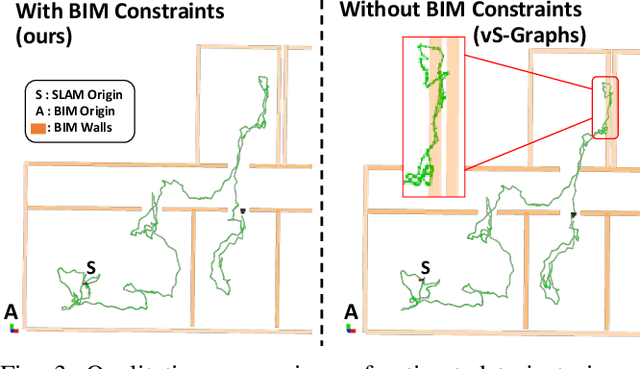

Simultaneous Localization and Mapping (SLAM) is a key tool for monitoring construction sites, where aligning the evolving as-built state with the as-planned design enables early error detection and reduces costly rework. LiDAR-based SLAM achieves high geometric precision, but its sensors are typically large and power-demanding, limiting their use on portable platforms. Visual SLAM offers a practical alternative with lightweight cameras already embedded in most mobile devices. however, visually mapping construction environments remains challenging: repetitive layouts, occlusions, and incomplete or low-texture structures often cause drift in the trajectory map. To mitigate this, we propose an RGB-D SLAM system that incorporates the Building Information Model (BIM) as structural prior knowledge. Instead of relying solely on visual cues, our system continuously establishes correspondences between detected wall and their BIM counterparts, which are then introduced as constraints in the back-end optimization. The proposed method operates in real time and has been validated on real construction sites, reducing trajectory error by an average of 23.71% and map RMSE by 7.14% compared to visual SLAM baselines. These results demonstrate that BIM constraints enable reliable alignment of the digital plan with the as-built scene, even under partially constructed conditions.
SMapper: A Multi-Modal Data Acquisition Platform for SLAM Benchmarking
Sep 11, 2025Advancing research in fields like Simultaneous Localization and Mapping (SLAM) and autonomous navigation critically depends on reliable and reproducible multimodal datasets. While several influential datasets have driven progress in these domains, they often suffer from limitations in sensing modalities, environmental diversity, and the reproducibility of the underlying hardware setups. To address these challenges, this paper introduces SMapper, a novel open-hardware, multi-sensor platform designed explicitly for, though not limited to, SLAM research. The device integrates synchronized LiDAR, multi-camera, and inertial sensing, supported by a robust calibration and synchronization pipeline that ensures precise spatio-temporal alignment across modalities. Its open and replicable design allows researchers to extend its capabilities and reproduce experiments across both handheld and robot-mounted scenarios. To demonstrate its practicality, we additionally release SMapper-light, a publicly available SLAM dataset containing representative indoor and outdoor sequences. The dataset includes tightly synchronized multimodal data and ground-truth trajectories derived from offline LiDAR-based SLAM with sub-centimeter accuracy, alongside dense 3D reconstructions. Furthermore, the paper contains benchmarking results on state-of-the-art LiDAR and visual SLAM frameworks using the SMapper-light dataset. By combining open-hardware design, reproducible data collection, and comprehensive benchmarking, SMapper establishes a robust foundation for advancing SLAM algorithm development, evaluation, and reproducibility.
Exploring Unstructured Environments using Minimal Sensing on Cooperative Nano-Drones
Jul 09, 2024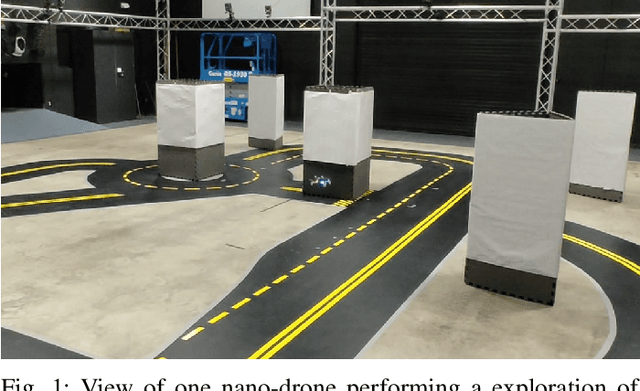
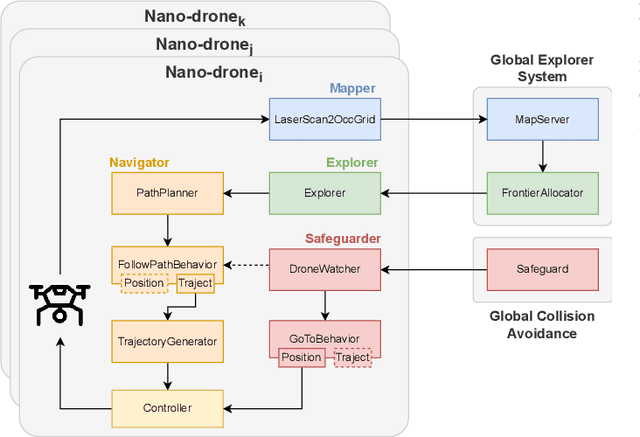
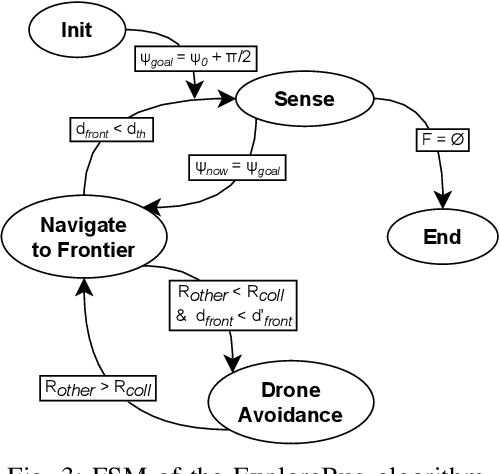
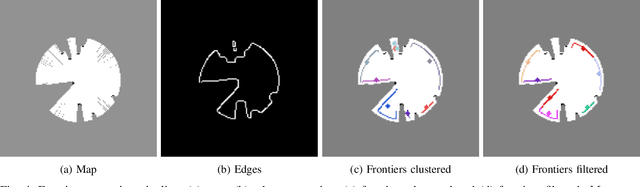
Recent advances have improved autonomous navigation and mapping under payload constraints, but current multi-robot inspection algorithms are unsuitable for nano-drones due to their need for heavy sensors and high computational resources. To address these challenges, we introduce ExploreBug, a novel hybrid frontier range bug algorithm designed to handle limited sensing capabilities for a swarm of nano-drones. This system includes three primary components: a mapping subsystem, an exploration subsystem, and a navigation subsystem. Additionally, an intra-swarm collision avoidance system is integrated to prevent collisions between drones. We validate the efficacy of our approach through extensive simulations and real-world exploration experiments involving up to seven drones in simulations and three in real-world settings, across various obstacle configurations and with a maximum navigation speed of 0.75 m/s. Our tests demonstrate that the algorithm efficiently completes exploration tasks, even with minimal sensing, across different swarm sizes and obstacle densities. Furthermore, our frontier allocation heuristic ensures an equal distribution of explored areas and paths traveled by each drone in the swarm. We publicly release the source code of the proposed system to foster further developments in mapping and exploration using autonomous nano drones.
The landscape of Collective Awareness in multi-robot systems
Jan 17, 2024The development of collective-aware multi-robot systems is crucial for enhancing the efficiency and robustness of robotic applications in multiple fields. These systems enable collaboration, coordination, and resource sharing among robots, leading to improved scalability, adaptability to dynamic environments, and increased overall system robustness. In this work, we want to provide a brief overview of this research topic and identify open challenges.
Multi S-Graphs: an Efficient Real-time Distributed Semantic-Relational Collaborative SLAM
Jan 10, 2024Collaborative Simultaneous Localization and Mapping (CSLAM) is critical to enable multiple robots to operate in complex environments. Most CSLAM techniques rely on raw sensor measurement or low-level features such as keyframe descriptors, which can lead to wrong loop closures due to the lack of deep understanding of the environment. Moreover, the exchange of these measurements and low-level features among the robots requires the transmission of a significant amount of data, which limits the scalability of the system. To overcome these limitations, we present Multi S-Graphs, a decentralized CSLAM system that utilizes high-level semantic-relational information embedded in the four-layered hierarchical and optimizable situational graphs for cooperative map generation and localization while minimizing the information exchanged between the robots. To support this, we present a novel room-based descriptor which, along with its connected walls, is used to perform inter-robot loop closures, addressing the challenges of multi-robot kidnapped problem initialization. Multiple experiments in simulated and real environments validate the improvement in accuracy and robustness of the proposed approach while reducing the amount of data exchanged between robots compared to other state-of-the-art approaches. Software available within a docker image: https://github.com/snt-arg/multi_s_graphs_docker
Multi S-graphs: A Collaborative Semantic SLAM architecture
May 05, 2023Collaborative Simultaneous Localization and Mapping (CSLAM) is a critical capability for enabling multiple robots to operate in complex environments. Most CSLAM techniques rely on the transmission of low-level features for visual and LiDAR-based approaches, which are used for pose graph optimization. However, these low-level features can lead to incorrect loop closures, negatively impacting map generation.Recent approaches have proposed the use of high-level semantic information in the form of Hierarchical Semantic Graphs to improve the loop closure procedures and overall precision of SLAM algorithms. In this work, we present Multi S-Graphs, an S-graphs [1] based distributed CSLAM algorithm that utilizes high-level semantic information for cooperative map generation while minimizing the amount of information exchanged between robots. Experimental results demonstrate the promising performance of the proposed algorithm in map generation tasks.
Local Gaussian Modifiers (LGMs): UAV dynamic trajectory generation for onboard computation
May 05, 2023



Agile autonomous drones are becoming increasingly popular in research due to the challenges they represent in fields like control, state estimation, or perception at high speeds. When all algorithms are computed onboard the uav, the computational limitations make the task of agile and robust flight even more difficult. One of the most computationally expensive tasks in agile flight is the generation of optimal trajectories that tackles the problem of planning a minimum time trajectory for a quadrotor over a sequence of specified waypoints. When these trajectories must be updated online due to changes in the environment or uncertainties, this high computational cost can leverage to not reach the desired waypoints or even crash in cluttered environments. In this paper, a fast lightweight dynamic trajectory modification approach is presented to allow modifying computational heavy trajectories using Local Gaussian Modifiers (LGMs), when recalculating a trajectory is not possible due to the time of computation. Our approach was validated in simulation, being able to pass through a race circuit with dynamic gates with top speeds up to 16.0 m/s, and was also validated in real flight reaching speeds up to 4.0 m/s in a fully autonomous onboard computing condition.