 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFlocking behavior for dynamic and complex swarm structures
Jan 29, 2026Maintaining the formation of complex structures with multiple UAVs and achieving complex trajectories remains a major challenge. This work presents an algorithm for implementing the flocking behavior of UAVs based on the concept of Virtual Centroid to easily develop a structure for the flock. The approach builds on the classical virtual-based behavior, providing a theoretical framework for incorporating enhancements to dynamically control both the number of agents and the formation of the structure. Simulation tests and real-world experiments were conducted, demonstrating its simplicity even with complex formations and complex trajectories.
Exploring Unstructured Environments using Minimal Sensing on Cooperative Nano-Drones
Jul 09, 2024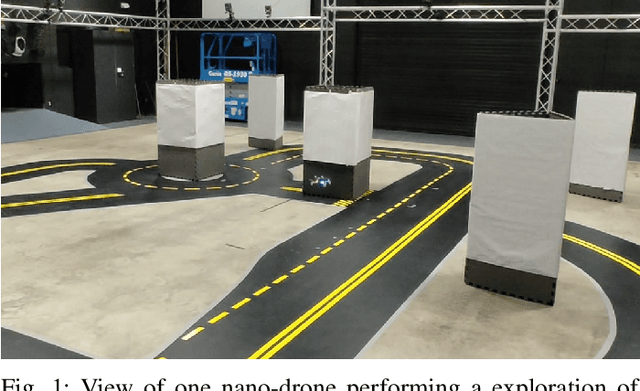
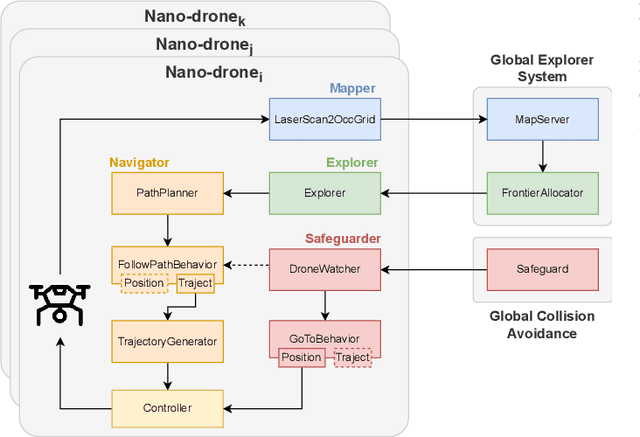
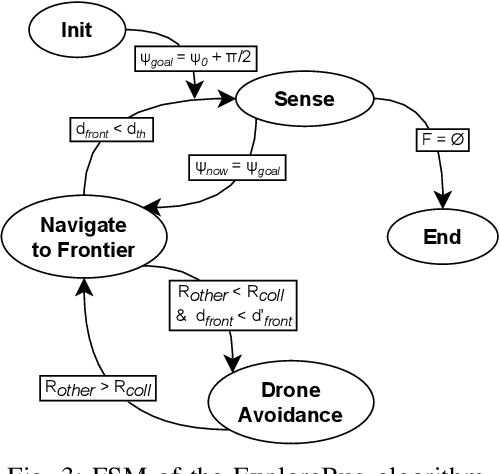
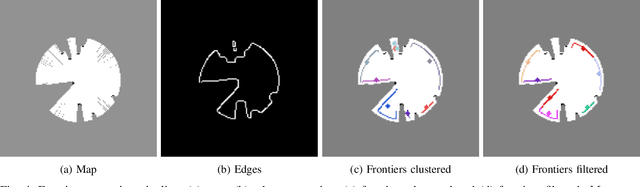
Recent advances have improved autonomous navigation and mapping under payload constraints, but current multi-robot inspection algorithms are unsuitable for nano-drones due to their need for heavy sensors and high computational resources. To address these challenges, we introduce ExploreBug, a novel hybrid frontier range bug algorithm designed to handle limited sensing capabilities for a swarm of nano-drones. This system includes three primary components: a mapping subsystem, an exploration subsystem, and a navigation subsystem. Additionally, an intra-swarm collision avoidance system is integrated to prevent collisions between drones. We validate the efficacy of our approach through extensive simulations and real-world exploration experiments involving up to seven drones in simulations and three in real-world settings, across various obstacle configurations and with a maximum navigation speed of 0.75 m/s. Our tests demonstrate that the algorithm efficiently completes exploration tasks, even with minimal sensing, across different swarm sizes and obstacle densities. Furthermore, our frontier allocation heuristic ensures an equal distribution of explored areas and paths traveled by each drone in the swarm. We publicly release the source code of the proposed system to foster further developments in mapping and exploration using autonomous nano drones.
Aerostack2: A Software Framework for Developing Multi-robot Aerial Systems
Mar 31, 2023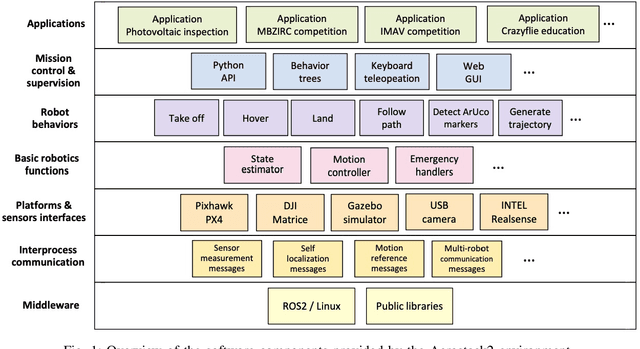
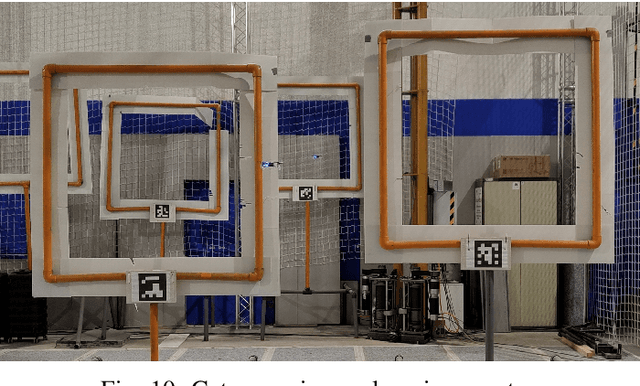

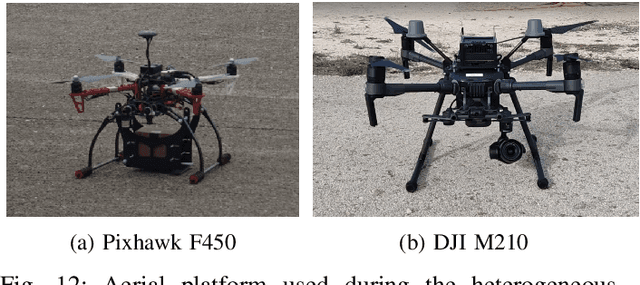
In recent years, the robotics community has witnessed the development of several software stacks for ground and articulated robots, such as Navigation2 and MoveIt. However, the same level of collaboration and standardization is yet to be achieved in the field of aerial robotics, where each research group has developed their own frameworks. This work presents Aerostack2, a framework for the development of autonomous aerial robotics systems that aims to address the lack of standardization and fragmentation of efforts in the field. Built on ROS 2 middleware and featuring an efficient modular software architecture and multi-robot orientation, Aerostack2 is a versatile and platform-independent environment that covers a wide range of robot capabilities for autonomous operation. Its major contributions include providing a logical level for specifying missions, reusing components and sub-systems for aerial robotics, and enabling the development of complete control architectures. All major contributions have been tested in simulation and real flights with multiple heterogeneous swarms. Aerostack2 is open source and community oriented, democratizing the access to its technology by autonomous drone systems developers.