 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExploring Unstructured Environments using Minimal Sensing on Cooperative Nano-Drones
Paper and Code
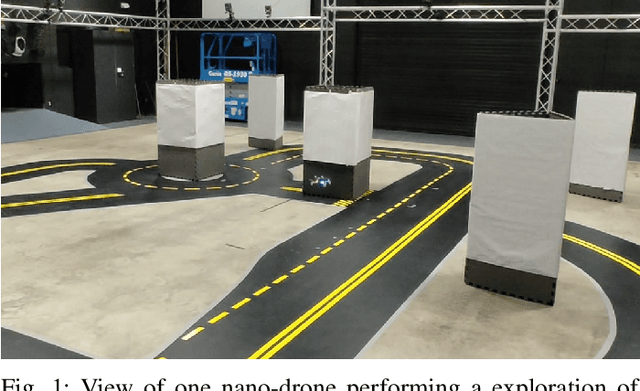
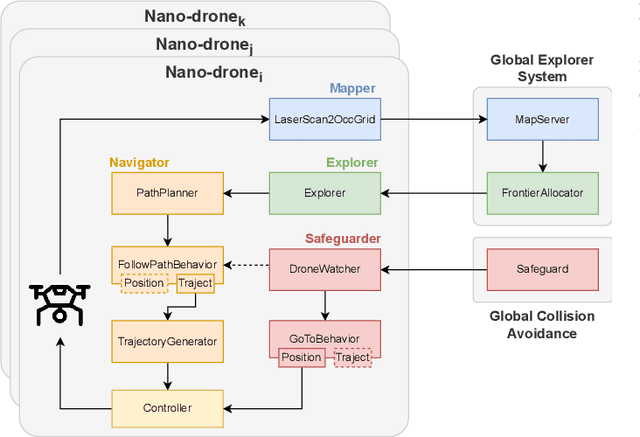
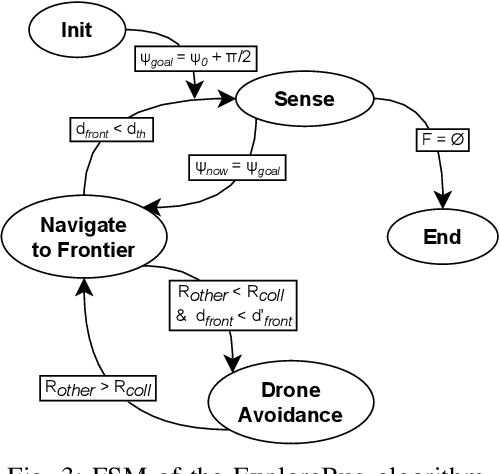
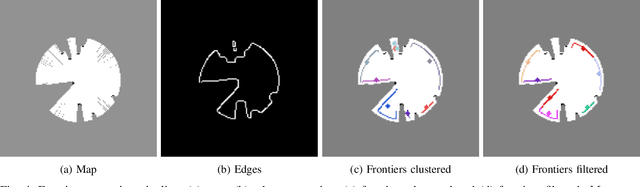
Recent advances have improved autonomous navigation and mapping under payload constraints, but current multi-robot inspection algorithms are unsuitable for nano-drones due to their need for heavy sensors and high computational resources. To address these challenges, we introduce ExploreBug, a novel hybrid frontier range bug algorithm designed to handle limited sensing capabilities for a swarm of nano-drones. This system includes three primary components: a mapping subsystem, an exploration subsystem, and a navigation subsystem. Additionally, an intra-swarm collision avoidance system is integrated to prevent collisions between drones. We validate the efficacy of our approach through extensive simulations and real-world exploration experiments involving up to seven drones in simulations and three in real-world settings, across various obstacle configurations and with a maximum navigation speed of 0.75 m/s. Our tests demonstrate that the algorithm efficiently completes exploration tasks, even with minimal sensing, across different swarm sizes and obstacle densities. Furthermore, our frontier allocation heuristic ensures an equal distribution of explored areas and paths traveled by each drone in the swarm. We publicly release the source code of the proposed system to foster further developments in mapping and exploration using autonomous nano drones.