 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe landscape of Collective Awareness in multi-robot systems
Jan 17, 2024The development of collective-aware multi-robot systems is crucial for enhancing the efficiency and robustness of robotic applications in multiple fields. These systems enable collaboration, coordination, and resource sharing among robots, leading to improved scalability, adaptability to dynamic environments, and increased overall system robustness. In this work, we want to provide a brief overview of this research topic and identify open challenges.
Aerostack2: A Software Framework for Developing Multi-robot Aerial Systems
Mar 31, 2023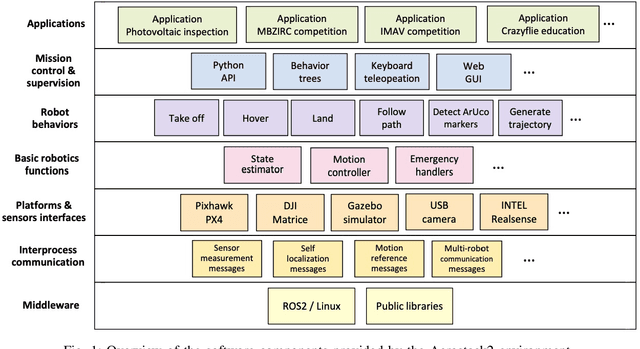

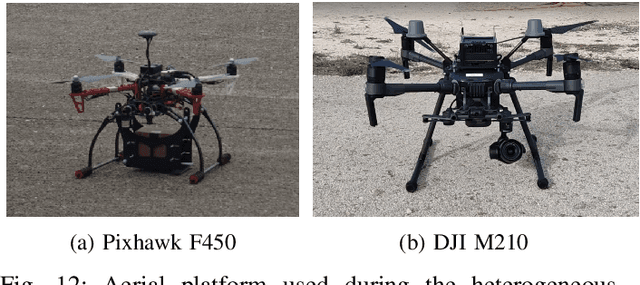
In recent years, the robotics community has witnessed the development of several software stacks for ground and articulated robots, such as Navigation2 and MoveIt. However, the same level of collaboration and standardization is yet to be achieved in the field of aerial robotics, where each research group has developed their own frameworks. This work presents Aerostack2, a framework for the development of autonomous aerial robotics systems that aims to address the lack of standardization and fragmentation of efforts in the field. Built on ROS 2 middleware and featuring an efficient modular software architecture and multi-robot orientation, Aerostack2 is a versatile and platform-independent environment that covers a wide range of robot capabilities for autonomous operation. Its major contributions include providing a logical level for specifying missions, reusing components and sub-systems for aerial robotics, and enabling the development of complete control architectures. All major contributions have been tested in simulation and real flights with multiple heterogeneous swarms. Aerostack2 is open source and community oriented, democratizing the access to its technology by autonomous drone systems developers.
Autonomous Aerial Robot for High-Speed Search and Intercept Applications
Dec 10, 2021

In recent years, high-speed navigation and environment interaction in the context of aerial robotics has become a field of interest for several academic and industrial research studies. In particular, Search and Intercept (SaI) applications for aerial robots pose a compelling research area due to their potential usability in several environments. Nevertheless, SaI tasks involve a challenging development regarding sensory weight, on-board computation resources, actuation design and algorithms for perception and control, among others. In this work, a fully-autonomous aerial robot for high-speed object grasping has been proposed. As an additional sub-task, our system is able to autonomously pierce balloons located in poles close to the surface. Our first contribution is the design of the aerial robot at an actuation and sensory level consisting of a novel gripper design with additional sensors enabling the robot to grasp objects at high speeds. The second contribution is a complete software framework consisting of perception, state estimation, motion planning, motion control and mission control in order to rapid- and robustly perform the autonomous grasping mission. Our approach has been validated in a challenging international competition and has shown outstanding results, being able to autonomously search, follow and grasp a moving object at 6 m/s in an outdoor environment
Behavior coordination for self-adaptive robots using constraint-based configuration
Mar 24, 2021



Autonomous robots may be able to adapt their behavior in response to changes in the environment. This is useful, for example, to efficiently handle limited resources or to respond appropriately to unexpected events such as faults. The architecture of a self-adaptive robot is complex because it should include automatic mechanisms to dynamically configure the elements that control robot behaviors. To facilitate the construction of this type of architectures, it is useful to have general solutions in the form of software tools that may be applicable to different robotic systems. This paper presents an original algorithm to dynamically configure the control architecture, which is applicable to the development of self-adaptive autonomous robots. This algorithm uses a constraint-based configuration approach to decide which basic robot behaviors should be activated in response to both reactive and deliberative events. The algorithm uses specific search heuristics and initialization procedures to achieve the performance required by robotic systems. The solution has been implemented as a software development tool called Behavior Coordinator CBC (Constraint-Based Configuration), which is based on ROS and open source, available to the general public. This tool has been successfully used for building multiple applications of autonomous aerial robots.
Programming Robot Behaviors with Execution Management Functions
Mar 11, 2021



The control architecture of autonomous robots can be developed by programming and integrating multiple software components that individually control separate behaviors. This approach requires additional mechanisms to coordinate their concurrent execution. This paper presents a programming method for such components that has been designed to facilitate their coordinated execution. Each component is programmed as a module that controls a separate robot behavior together with a set of functions for execution management. The details of this proposal are formulated in the form of a ROS-based software library called \textit{behaviorlib}. This solution has been used to program general behavior controllers that have been successfully reused to build multiple applications in aerial robotics.
An Artificial Consciousness Model and its relations with Philosophy of Mind
Dec 01, 2020



This work seeks to study the beneficial properties that an autonomous agent can obtain by implementing a cognitive architecture similar to the one of conscious beings. Along this document, a conscious model of autonomous agent based in a global workspace architecture is presented. We describe how this agent is viewed from different perspectives of philosophy of mind, being inspired by their ideas. The goal of this model is to create autonomous agents able to navigate within an environment composed of multiple independent magnitudes, adapting to its surroundings in order to find the best possible position in base of its inner preferences. The purpose of the model is to test the effectiveness of many cognitive mechanisms that are incorporated, such as an attention mechanism for magnitude selection, pos-session of inner feelings and preferences, usage of a memory system to storage beliefs and past experiences, and incorporating a global workspace which controls and integrates information processed by all the subsystem of the model. We show in a large experiment set how an autonomous agent can benefit from having a cognitive architecture such as the one described.
What is an intelligent system?
Aug 31, 2020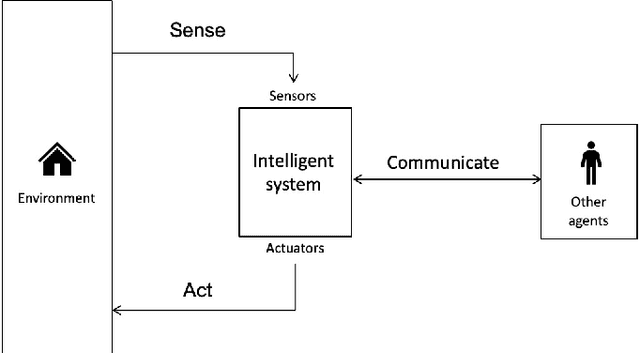
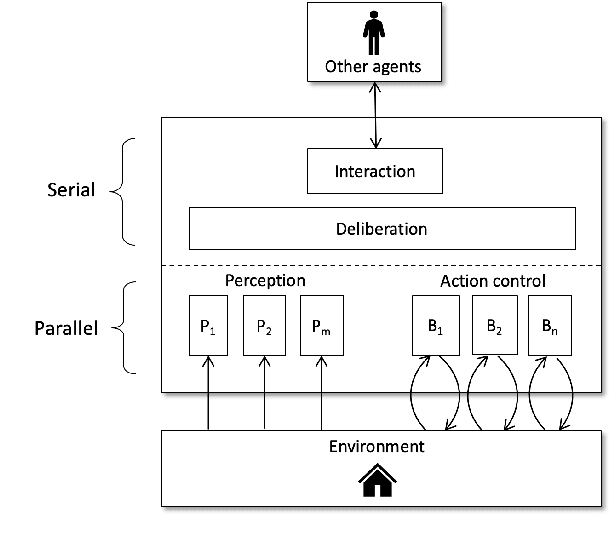
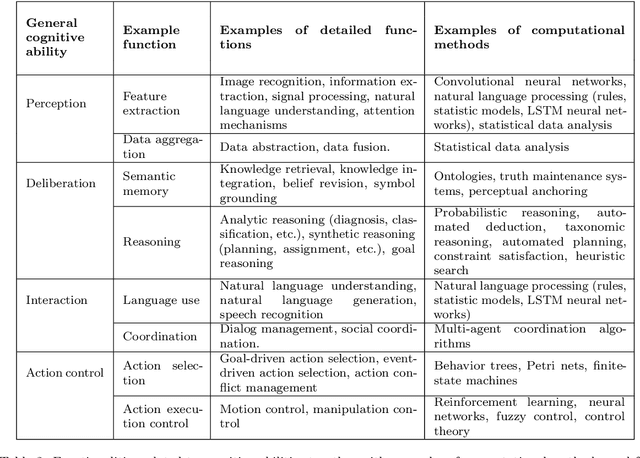
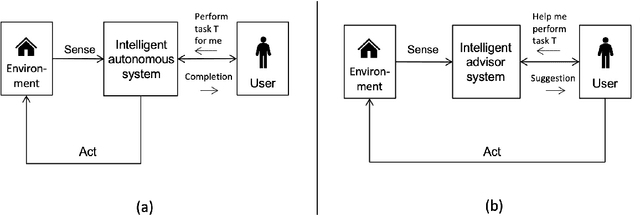
The concept of intelligent system has emerged in information technology as a type of system derived from successful applications of artificial intelligence. The goal of this paper is to give a general description of an intelligent system, which integrates previous approaches and takes into account recent advances in artificial intelligence. The paper describes an intelligent system in a generic way, identifying its main properties and functional components, and presents some common categories. The presented description follows a practical approach to be used by system engineers. Its generality and its use is illustrated with real-world system examples and related with artificial intelligence methods.