 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSingle-image Reflectance and Transmittance Estimation from Any Flatbed Scanner
Feb 20, 2025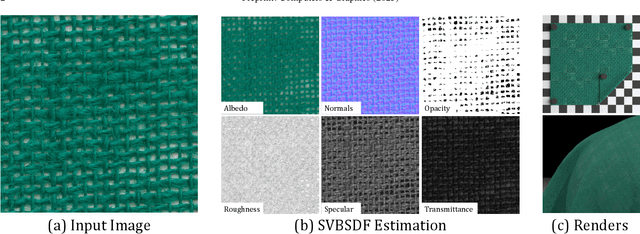
Flatbed scanners have emerged as promising devices for high-resolution, single-image material capture. However, existing approaches assume very specific conditions, such as uniform diffuse illumination, which are only available in certain high-end devices, hindering their scalability and cost. In contrast, in this work, we introduce a method inspired by intrinsic image decomposition, which accurately removes both shading and specularity, effectively allowing captures with any flatbed scanner. Further, we extend previous work on single-image material reflectance capture with the estimation of opacity and transmittance, critical components of full material appearance (SVBSDF), improving the results for any material captured with a flatbed scanner, at a very high resolution and accuracy
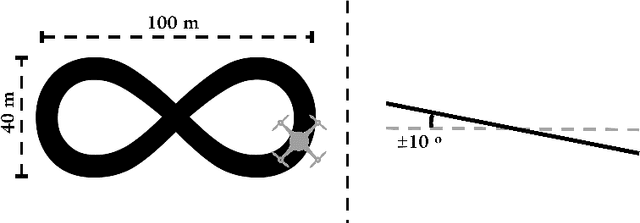
Local Gaussian Modifiers (LGMs): UAV dynamic trajectory generation for onboard computation
May 05, 2023



Agile autonomous drones are becoming increasingly popular in research due to the challenges they represent in fields like control, state estimation, or perception at high speeds. When all algorithms are computed onboard the uav, the computational limitations make the task of agile and robust flight even more difficult. One of the most computationally expensive tasks in agile flight is the generation of optimal trajectories that tackles the problem of planning a minimum time trajectory for a quadrotor over a sequence of specified waypoints. When these trajectories must be updated online due to changes in the environment or uncertainties, this high computational cost can leverage to not reach the desired waypoints or even crash in cluttered environments. In this paper, a fast lightweight dynamic trajectory modification approach is presented to allow modifying computational heavy trajectories using Local Gaussian Modifiers (LGMs), when recalculating a trajectory is not possible due to the time of computation. Our approach was validated in simulation, being able to pass through a race circuit with dynamic gates with top speeds up to 16.0 m/s, and was also validated in real flight reaching speeds up to 4.0 m/s in a fully autonomous onboard computing condition.
Autonomous Aerial Robot for High-Speed Search and Intercept Applications
Dec 10, 2021

In recent years, high-speed navigation and environment interaction in the context of aerial robotics has become a field of interest for several academic and industrial research studies. In particular, Search and Intercept (SaI) applications for aerial robots pose a compelling research area due to their potential usability in several environments. Nevertheless, SaI tasks involve a challenging development regarding sensory weight, on-board computation resources, actuation design and algorithms for perception and control, among others. In this work, a fully-autonomous aerial robot for high-speed object grasping has been proposed. As an additional sub-task, our system is able to autonomously pierce balloons located in poles close to the surface. Our first contribution is the design of the aerial robot at an actuation and sensory level consisting of a novel gripper design with additional sensors enabling the robot to grasp objects at high speeds. The second contribution is a complete software framework consisting of perception, state estimation, motion planning, motion control and mission control in order to rapid- and robustly perform the autonomous grasping mission. Our approach has been validated in a challenging international competition and has shown outstanding results, being able to autonomously search, follow and grasp a moving object at 6 m/s in an outdoor environment