 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAwareness in robotics: An early perspective from the viewpoint of the EIC Pathfinder Challenge "Awareness Inside''
Feb 14, 2024Consciousness has been historically a heavily debated topic in engineering, science, and philosophy. On the contrary, awareness had less success in raising the interest of scholars in the past. However, things are changing as more and more researchers are getting interested in answering questions concerning what awareness is and how it can be artificially generated. The landscape is rapidly evolving, with multiple voices and interpretations of the concept being conceived and techniques being developed. The goal of this paper is to summarize and discuss the ones among these voices connected with projects funded by the EIC Pathfinder Challenge called ``Awareness Inside'', a nonrecurring call for proposals within Horizon Europe designed specifically for fostering research on natural and synthetic awareness. In this perspective, we dedicate special attention to challenges and promises of applying synthetic awareness in robotics, as the development of mature techniques in this new field is expected to have a special impact on generating more capable and trustworthy embodied systems.
The landscape of Collective Awareness in multi-robot systems
Jan 17, 2024The development of collective-aware multi-robot systems is crucial for enhancing the efficiency and robustness of robotic applications in multiple fields. These systems enable collaboration, coordination, and resource sharing among robots, leading to improved scalability, adaptability to dynamic environments, and increased overall system robustness. In this work, we want to provide a brief overview of this research topic and identify open challenges.
Category Theory for Autonomous Robots: The Marathon 2 Use Case
Mar 02, 2023
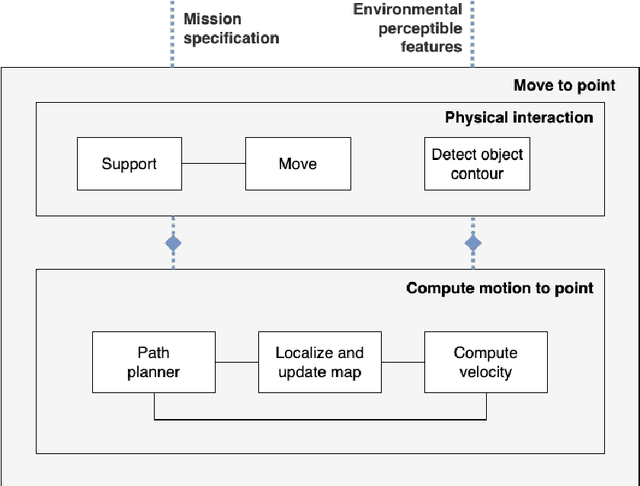


Model-based systems engineering (MBSE) is a methodology that exploits system representation during the entire system life-cycle. The use of formal models has gained momentum in robotics engineering over the past few years. Models play a crucial role in robot design; they serve as the basis for achieving holistic properties, such as functional reliability or adaptive resilience, and facilitate the automated production of modules. We propose the use of formal conceptualizations beyond the engineering phase, providing accurate models that can be leveraged at runtime. This paper explores the use of Category Theory, a mathematical framework for describing abstractions, as a formal language to produce such robot models. To showcase its practical application, we present a concrete example based on the Marathon 2 experiment. Here, we illustrate the potential of formalizing systems -- including their recovery mechanisms -- which allows engineers to design more trustworthy autonomous robots. This, in turn, enhances their dependability and performance.