 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSuperEIO: Self-Supervised Event Feature Learning for Event Inertial Odometry
Mar 29, 2025Event cameras asynchronously output low-latency event streams, promising for state estimation in high-speed motion and challenging lighting conditions. As opposed to frame-based cameras, the motion-dependent nature of event cameras presents persistent challenges in achieving robust event feature detection and matching. In recent years, learning-based approaches have demonstrated superior robustness over traditional handcrafted methods in feature detection and matching, particularly under aggressive motion and HDR scenarios. In this paper, we propose SuperEIO, a novel framework that leverages the learning-based event-only detection and IMU measurements to achieve event-inertial odometry. Our event-only feature detection employs a convolutional neural network under continuous event streams. Moreover, our system adopts the graph neural network to achieve event descriptor matching for loop closure. The proposed system utilizes TensorRT to accelerate the inference speed of deep networks, which ensures low-latency processing and robust real-time operation on resource-limited platforms. Besides, we evaluate our method extensively on multiple public datasets, demonstrating its superior accuracy and robustness compared to other state-of-the-art event-based methods. We have also open-sourced our pipeline to facilitate research in the field: https://github.com/arclab-hku/SuperEIO.
DEIO: Deep Event Inertial Odometry
Nov 06, 2024Event cameras are bio-inspired, motion-activated sensors that demonstrate impressive potential in handling challenging situations, such as motion blur and high-dynamic range. Despite their promise, existing event-based simultaneous localization and mapping (SLAM) approaches exhibit limited performance in real-world applications. On the other hand, state-of-the-art SLAM approaches that incorporate deep neural networks for better robustness and applicability. However, these is a lack of research in fusing learning-based event SLAM methods with IMU, which could be indispensable to push the event-based SLAM to large-scale, low-texture or complex scenarios. In this paper, we propose DEIO, the first monocular deep event-inertial odometry framework that combines learning-based method with traditional nonlinear graph-based optimization. Specifically, we tightly integrate a trainable event-based differentiable bundle adjustment (e-DBA) with the IMU pre-integration in a factor graph which employs keyframe-based sliding window optimization. Numerical Experiments in nine public challenge datasets show that our method can achieve superior performance compared with the image-based and event-based benchmarks. The source code is available at: https://github.com/arclab-hku/DEIO.
Mutation Sensitive Correlation Filter for Real-Time UAV Tracking with Adaptive Hybrid Label
Jun 15, 2021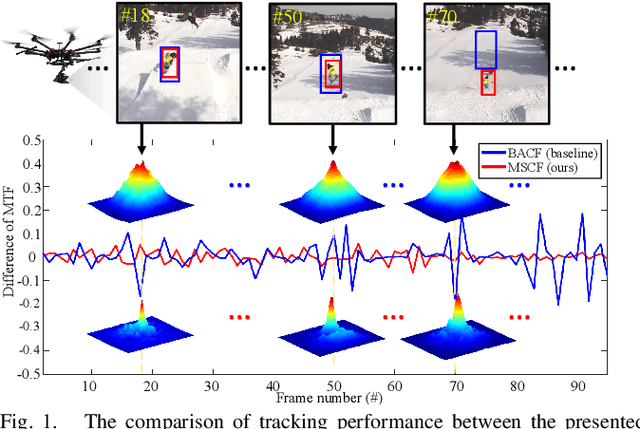
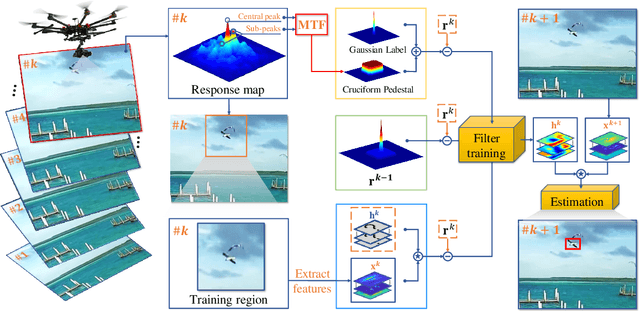
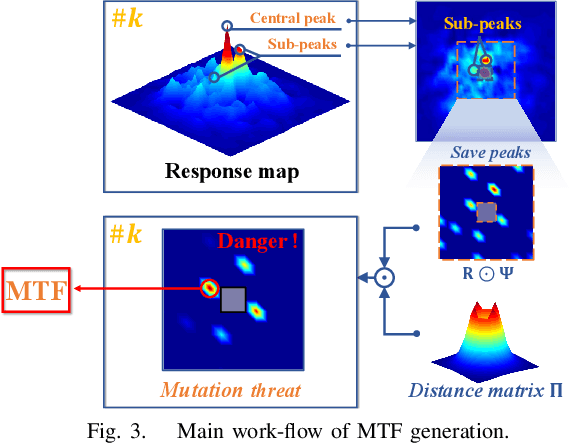
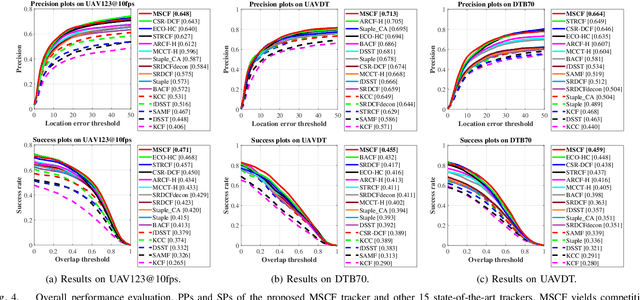
Unmanned aerial vehicle (UAV) based visual tracking has been confronted with numerous challenges, e.g., object motion and occlusion. These challenges generally introduce unexpected mutations of target appearance and result in tracking failure. However, prevalent discriminative correlation filter (DCF) based trackers are insensitive to target mutations due to a predefined label, which concentrates on merely the centre of the training region. Meanwhile, appearance mutations caused by occlusion or similar objects usually lead to the inevitable learning of wrong information. To cope with appearance mutations, this paper proposes a novel DCF-based method to enhance the sensitivity and resistance to mutations with an adaptive hybrid label, i.e., MSCF. The ideal label is optimized jointly with the correlation filter and remains temporal consistency. Besides, a novel measurement of mutations called mutation threat factor (MTF) is applied to correct the label dynamically. Considerable experiments are conducted on widely used UAV benchmarks. The results indicate that the performance of MSCF tracker surpasses other 26 state-of-the-art DCF-based and deep-based trackers. With a real-time speed of _38 frames/s, the proposed approach is sufficient for UAV tracking commissions.
ADTrack: Target-Aware Dual Filter Learning for Real-Time Anti-Dark UAV Tracking
Jun 04, 2021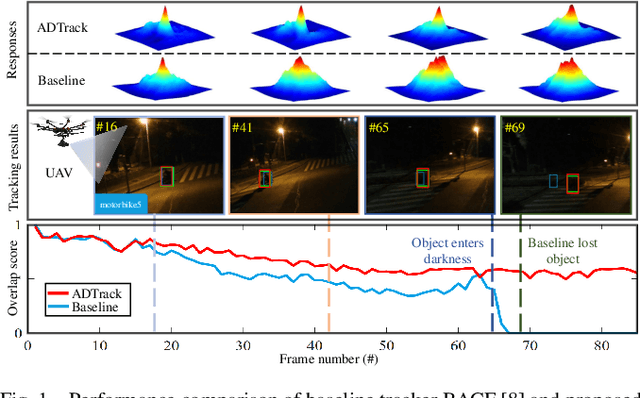



Prior correlation filter (CF)-based tracking methods for unmanned aerial vehicles (UAVs) have virtually focused on tracking in the daytime. However, when the night falls, the trackers will encounter more harsh scenes, which can easily lead to tracking failure. In this regard, this work proposes a novel tracker with anti-dark function (ADTrack). The proposed method integrates an efficient and effective low-light image enhancer into a CF-based tracker. Besides, a target-aware mask is simultaneously generated by virtue of image illumination variation. The target-aware mask can be applied to jointly train a target-focused filter that assists the context filter for robust tracking. Specifically, ADTrack adopts dual regression, where the context filter and the target-focused filter restrict each other for dual filter learning. Exhaustive experiments are conducted on typical dark sceneries benchmark, consisting of 37 typical night sequences from authoritative benchmarks, i.e., UAVDark, and our newly constructed benchmark UAVDark70. The results have shown that ADTrack favorably outperforms other state-of-the-art trackers and achieves a real-time speed of 34 frames/s on a single CPU, greatly extending robust UAV tracking to night scenes.
All-Day Object Tracking for Unmanned Aerial Vehicle
Jan 24, 2021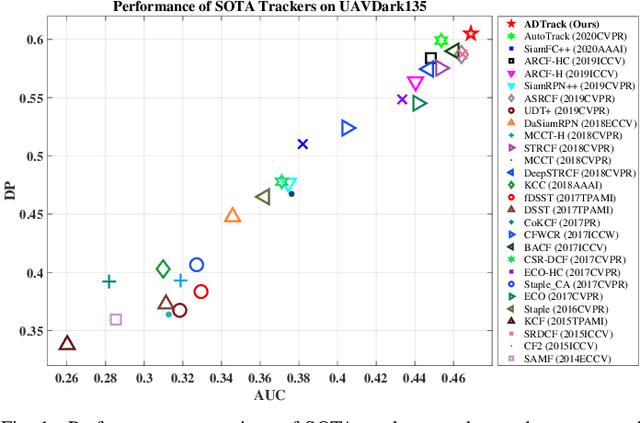

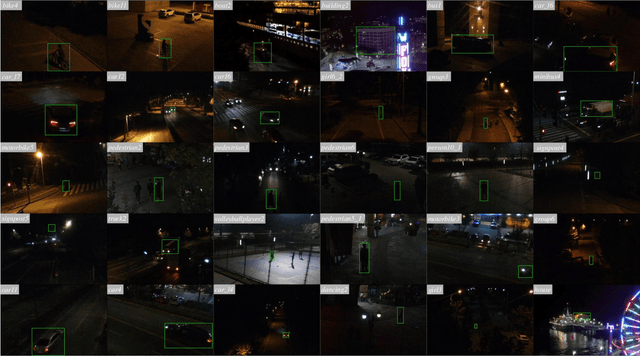

Visual object tracking, which is representing a major interest in image processing field, has facilitated numerous real world applications. Among them, equipping unmanned aerial vehicle (UAV) with real time robust visual trackers for all day aerial maneuver, is currently attracting incremental attention and has remarkably broadened the scope of applications of object tracking. However, prior tracking methods have merely focused on robust tracking in the well-illuminated scenes, while ignoring trackers' capabilities to be deployed in the dark. In darkness, the conditions can be more complex and harsh, easily posing inferior robust tracking or even tracking failure. To this end, this work proposed a novel discriminative correlation filter based tracker with illumination adaptive and anti dark capability, namely ADTrack. ADTrack firstly exploits image illuminance information to enable adaptability of the model to the given light condition. Then, by virtue of an efficient and effective image enhancer, ADTrack carries out image pretreatment, where a target aware mask is generated. Benefiting from the mask, ADTrack aims to solve a dual regression problem where dual filters, i.e., the context filter and target focused filter, are trained with mutual constraint. Thus ADTrack is able to maintain continuously favorable performance in all-day conditions. Besides, this work also constructed one UAV nighttime tracking benchmark UAVDark135, comprising of more than 125k manually annotated frames, which is also very first UAV nighttime tracking benchmark. Exhaustive experiments are extended on authoritative daytime benchmarks, i.e., UAV123 10fps, DTB70, and the newly built dark benchmark UAVDark135, which have validated the superiority of ADTrack in both bright and dark conditions on a single CPU.
Correlation Filter for UAV-Based Aerial Tracking: A Review and Experimental Evaluation
Oct 31, 2020
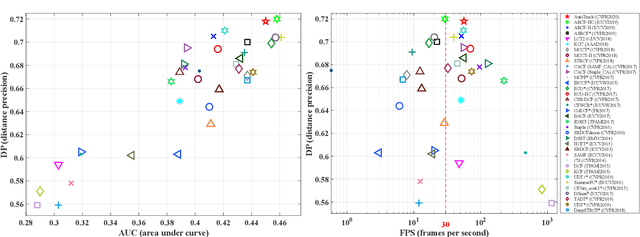

Aerial tracking, which has exhibited its omnipresent dedication and splendid performance, is one of the most active applications in the remote sensing field. Especially, unmanned aerial vehicle (UAV)-based remote sensing system, equipped with a visual tracking approach, has been widely used in aviation, navigation, agriculture, transportation, and public security, etc. As is mentioned above, the UAV-based aerial tracking platform has been gradually developed from research to practical application stage, reaching one of the main aerial remote sensing technologies in the future. However, due to real-world challenging situations, the vibration of the UAV's mechanical structure (especially under strong wind conditions), and limited computation resources, accuracy, robustness, and high efficiency are all crucial for the onboard tracking methods. Recently, the discriminative correlation filter (DCF)-based trackers have stood out for their high computational efficiency and appealing robustness on a single CPU, and have flourished in the UAV visual tracking community. In this work, the basic framework of the DCF-based trackers is firstly generalized, based on which, 20 state-of-the-art DCF-based trackers are orderly summarized according to their innovations for soloving various issues. Besides, exhaustive and quantitative experiments have been extended on various prevailing UAV tracking benchmarks, i.e., UAV123, UAV123_10fps, UAV20L, UAVDT, DTB70, and VisDrone2019-SOT, which contain 371,625 frames in total. The experiments show the performance, verify the feasibility, and demonstrate the current challenges of DCF-based trackers onboard UAV tracking. Finally, comprehensive conclusions on open challenges and directions for future research is presented.
Towards Robust Visual Tracking for Unmanned Aerial Vehicle with Tri-Attentional Correlation Filters
Aug 30, 2020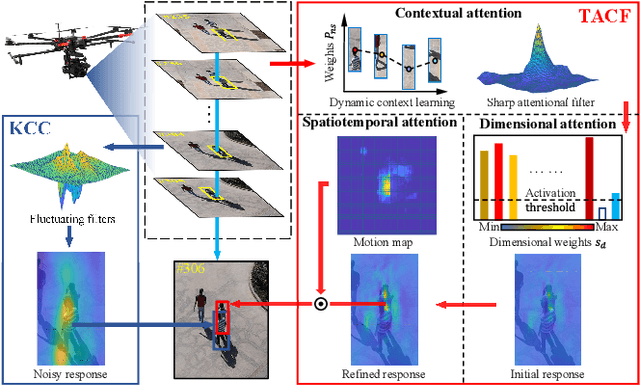



Object tracking has been broadly applied in unmanned aerial vehicle (UAV) tasks in recent years. However, existing algorithms still face difficulties such as partial occlusion, clutter background, and other challenging visual factors. Inspired by the cutting-edge attention mechanisms, a novel object tracking framework is proposed to leverage multi-level visual attention. Three primary attention, i.e., contextual attention, dimensional attention, and spatiotemporal attention, are integrated into the training and detection stages of correlation filter-based tracking pipeline. Therefore, the proposed tracker is equipped with robust discriminative power against challenging factors while maintaining high operational efficiency in UAV scenarios. Quantitative and qualitative experiments on two well-known benchmarks with 173 challenging UAV video sequences demonstrate the effectiveness of the proposed framework. The proposed tracking algorithm favorably outperforms 12 state-of-the-art methods, yielding 4.8% relative gain in UAVDT and 8.2% relative gain in UAV123@10fps against the baseline tracker while operating at the speed of $\sim$ 28 frames per second.
* IROS'20 accepted, 8 pages, 6 figures, and 2 tables
Training-Set Distillation for Real-Time UAV Object Tracking
Mar 11, 2020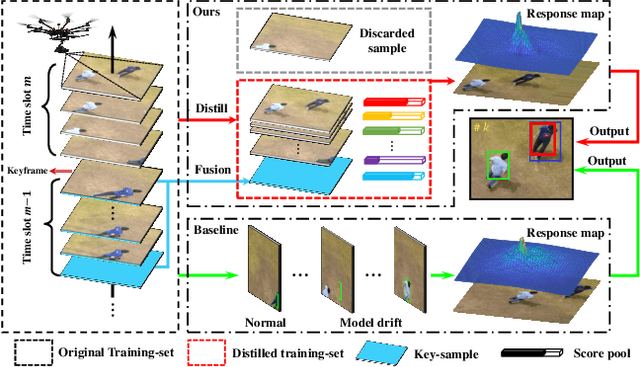

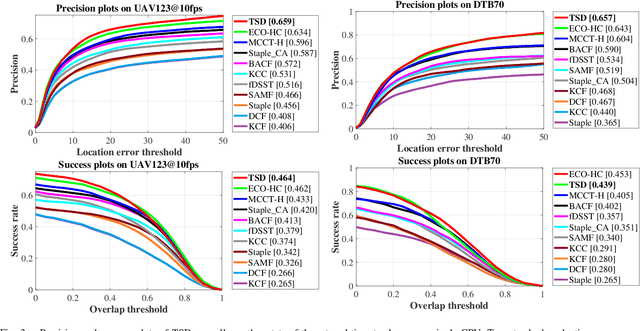

Correlation filter (CF) has recently exhibited promising performance in visual object tracking for unmanned aerial vehicle (UAV). Such online learning method heavily depends on the quality of the training-set, yet complicated aerial scenarios like occlusion or out of view can reduce its reliability. In this work, a novel time slot-based distillation approach is proposed to efficiently and effectively optimize the training-set's quality on the fly. A cooperative energy minimization function is established to score the historical samples adaptively. To accelerate the scoring process, frames with high confident tracking results are employed as the keyframes to divide the tracking process into multiple time slots. After the establishment of a new slot, the weighted fusion of the previous samples generates one key-sample, in order to reduce the number of samples to be scored. Besides, when the current time slot exceeds the maximum frame number, which can be scored, the sample with the lowest score will be discarded. Consequently, the training-set can be efficiently and reliably distilled. Comprehensive tests on two well-known UAV benchmarks prove the effectiveness of our method with real-time speed on a single CPU.
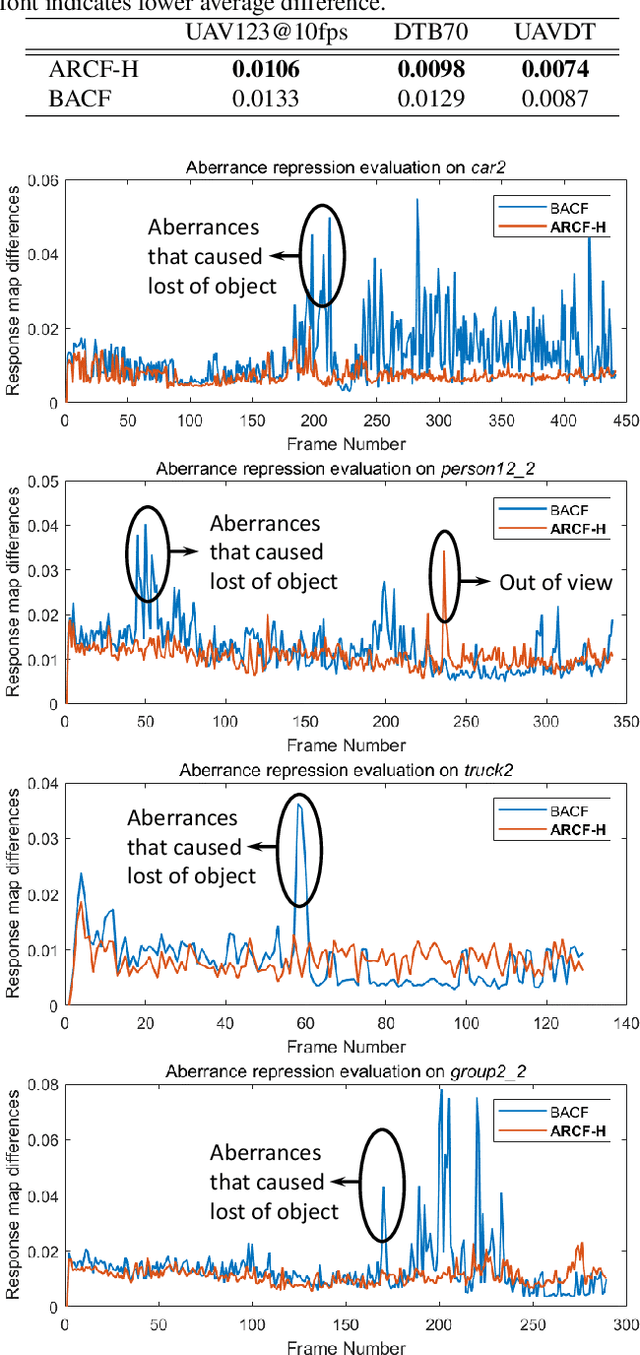
Learning Aberrance Repressed Correlation Filters for Real-Time UAV Tracking
Aug 07, 2019


Traditional framework of discriminative correlation filters (DCF) is often subject to undesired boundary effects. Several approaches to enlarge search regions have been already proposed in the past years to make up for this shortcoming. However, with excessive background information, more background noises are also introduced and the discriminative filter is prone to learn from the ambiance rather than the object. This situation, along with appearance changes of objects caused by full/partial occlusion, illumination variation, and other reasons has made it more likely to have aberrances in the detection process, which could substantially degrade the credibility of its result. Therefore, in this work, a novel approach to repress the aberrances happening during the detection process is proposed, i.e., aberrance repressed correlation filter (ARCF). By enforcing restriction to the rate of alteration in response maps generated in the detection phase, the ARCF tracker can evidently suppress aberrances and is thus more robust and accurate to track objects. Considerable experiments are conducted on different UAV datasets to perform object tracking from an aerial view, i.e., UAV123, UAVDT, and DTB70, with 243 challenging image sequences containing over 90K frames to verify the performance of the ARCF tracker and it has proven itself to have outperformed other 20 state-of-the-art trackers based on DCF and deep-based frameworks with sufficient speed for real-time applications.