 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIntrospective Loop Closure for SLAM with 4D Imaging Radar
Mar 04, 2025Simultaneous Localization and Mapping (SLAM) allows mobile robots to navigate without external positioning systems or pre-existing maps. Radar is emerging as a valuable sensing tool, especially in vision-obstructed environments, as it is less affected by particles than lidars or cameras. Modern 4D imaging radars provide three-dimensional geometric information and relative velocity measurements, but they bring challenges, such as a small field of view and sparse, noisy point clouds. Detecting loop closures in SLAM is critical for reducing trajectory drift and maintaining map accuracy. However, the directional nature of 4D radar data makes identifying loop closures, especially from reverse viewpoints, difficult due to limited scan overlap. This article explores using 4D radar for loop closure in SLAM, focusing on similar and opposing viewpoints. We generate submaps for a denser environment representation and use introspective measures to reject false detections in feature-degenerate environments. Our experiments show accurate loop closure detection in geometrically diverse settings for both similar and opposing viewpoints, improving trajectory estimation with up to 82 % improvement in ATE and rejecting false positives in self-similar environments.
Towards introspective loop closure in 4D radar SLAM
Apr 05, 2024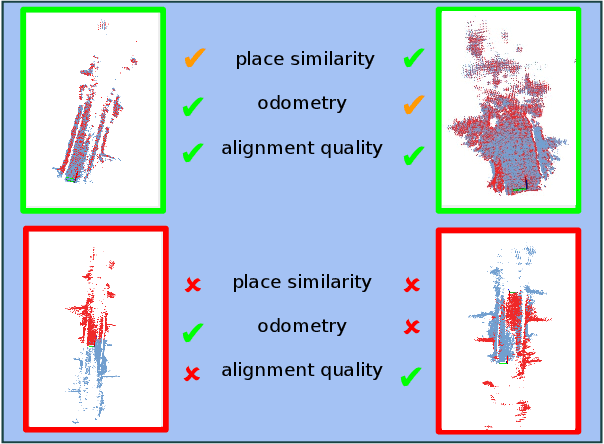

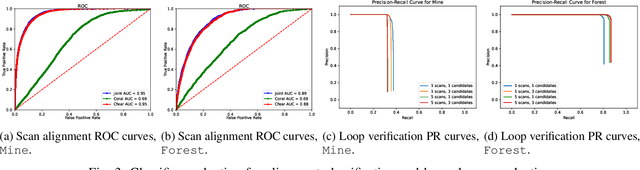
Imaging radar is an emerging sensor modality in the context of Localization and Mapping (SLAM), especially suitable for vision-obstructed environments. This article investigates the use of 4D imaging radars for SLAM and analyzes the challenges in robust loop closure. Previous work indicates that 4D radars, together with inertial measurements, offer ample information for accurate odometry estimation. However, the low field of view, limited resolution, and sparse and noisy measurements render loop closure a significantly more challenging problem. Our work builds on the previous work - TBV SLAM - which was proposed for robust loop closure with 360$^\circ$ spinning radars. This article highlights and addresses challenges inherited from a directional 4D radar, such as sparsity, noise, and reduced field of view, and discusses why the common definition of a loop closure is unsuitable. By combining multiple quality measures for accurate loop closure detection adapted to 4D radar data, significant results in trajectory estimation are achieved; the absolute trajectory error is as low as 0.46 m over a distance of 1.8 km, with consistent operation over multiple environments.
An evaluation of CFEAR Radar Odometry
Apr 03, 2024


This article describes the method CFEAR Radar odometry, submitted to a competition at the Radar in Robotics workshop, ICRA 20241. CFEAR is an efficient and accurate method for spinning 2D radar odometry that generalizes well across environments. This article presents an overview of the odometry pipeline with new experiments on the public Boreas dataset. We show that a real-time capable configuration of CFEAR - with its original parameter set - yields surprisingly low drift in the Boreas dataset. Additionally, we discuss an improved implementation and solving strategy that enables the most accurate configuration to run in real-time with improved robustness, reaching as low as 0.61% translation drift at a frame rate of 68 Hz. A recent release of the source code is available to the community https://github.com/dan11003/CFEAR_Radarodometry_code_public, and we publish the evaluation from this article on https://github.com/dan11003/cfear_2024_workshop
TBV Radar SLAM -- trust but verify loop candidates
Jan 12, 2023



Robust SLAM in large-scale environments requires fault resilience and awareness at multiple stages, from sensing and odometry estimation to loop closure. In this work, we present TBV (Trust But Verify) Radar SLAM, a method for radar SLAM that introspectively verifies loop closure candidates. TBV Radar SLAM achieves a high correct-loop-retrieval rate by combining multiple place-recognition techniques: tightly coupled place similarity and odometry uncertainty search, creating loop descriptors from origin-shifted scans, and delaying loop selection until after verification. Robustness to false constraints is achieved by carefully verifying and selecting the most likely ones from multiple loop constraints. Importantly, the verification and selection are carried out after registration when additional sources of loop evidence can easily be computed. We integrate our loop retrieval and verification method with a fault-resilient odometry pipeline within a pose graph framework. By evaluating on public benchmarks we found that TBV Radar SLAM achieves 65% lower error than the previous state of the art. We also show that it's generalizing across environments without needing to change any parameters.
Lidar-level localization with radar? The CFEAR approach to accurate, fast and robust large-scale radar odometry in diverse environments
Nov 07, 2022



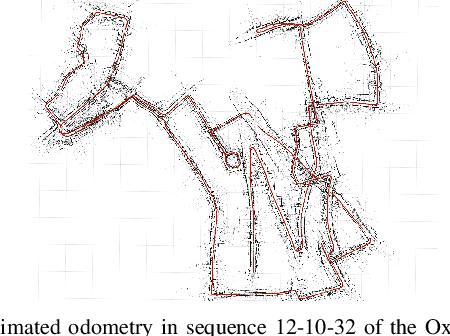
This paper presents an accurate, highly efficient, and learning-free method for large-scale odometry estimation using spinning radar, empirically found to generalize well across very diverse environments -- outdoors, from urban to woodland, and indoors in warehouses and mines - without changing parameters. Our method integrates motion compensation within a sweep with one-to-many scan registration that minimizes distances between nearby oriented surface points and mitigates outliers with a robust loss function. Extending our previous approach CFEAR, we present an in-depth investigation on a wider range of data sets, quantifying the importance of filtering, resolution, registration cost and loss functions, keyframe history, and motion compensation. We present a new solving strategy and configuration that overcomes previous issues with sparsity and bias, and improves our state-of-the-art by 38%, thus, surprisingly, outperforming radar SLAM and approaching lidar SLAM. The most accurate configuration achieves 1.09% error at 5Hz on the Oxford benchmark, and the fastest achieves 1.79% error at 160Hz.
CorAl: Introspection for Robust Radar and Lidar Perception in Diverse Environments Using Differential Entropy
May 12, 2022
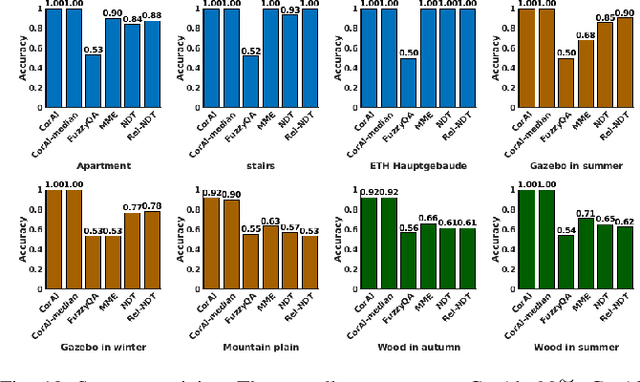
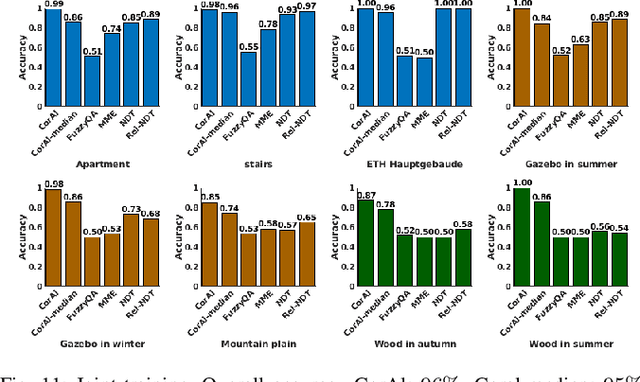
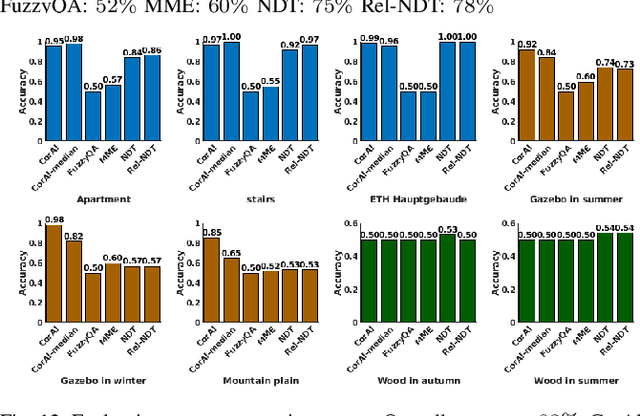
Robust perception is an essential component to enable long-term operation of mobile robots. It depends on failure resilience through reliable sensor data and preprocessing, as well as failure awareness through introspection, for example the ability to self-assess localization performance. This paper presents CorAl: a principled, intuitive, and generalizable method to measure the quality of alignment between pairs of point clouds, which learns to detect alignment errors in a self-supervised manner. CorAl compares the differential entropy in the point clouds separately with the entropy in their union to account for entropy inherent to the scene. By making use of dual entropy measurements, we obtain a quality metric that is highly sensitive to small alignment errors and still generalizes well to unseen environments. In this work, we extend our previous work on lidar-only CorAl to radar data by proposing a two-stage filtering technique that produces high-quality point clouds from noisy radar scans. Thus we target robust perception in two ways: by introducing a method that introspectively assesses alignment quality, and applying it to an inherently robust sensor modality. We show that our filtering technique combined with CorAl can be applied to the problem of alignment classification, and that it detects small alignment errors in urban settings with up to 98% accuracy, and with up to 96% if trained only in a different environment. Our lidar and radar experiments demonstrate that CorAl outperforms previous methods both on the ETH lidar benchmark, which includes several indoor and outdoor environments, and the large-scale Oxford and MulRan radar data sets for urban traffic scenarios The results also demonstrate that CorAl generalizes very well across substantially different environments without the need of retraining.
Oriented surface points for efficient and accurate radar odometry
Sep 21, 2021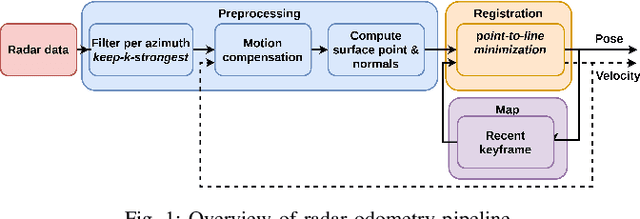
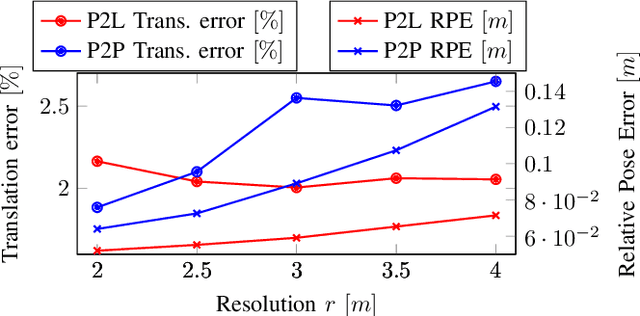

This paper presents an efficient and accurate radar odometry pipeline for large-scale localization. We propose a radar filter that keeps only the strongest reflections per-azimuth that exceeds the expected noise level. The filtered radar data is used to incrementally estimate odometry by registering the current scan with a nearby keyframe. By modeling local surfaces, we were able to register scans by minimizing a point-to-line metric and accurately estimate odometry from sparse point sets, hence improving efficiency. Specifically, we found that a point-to-line metric yields significant improvements compared to a point-to-point metric when matching sparse sets of surface points. Preliminary results from an urban odometry benchmark show that our odometry pipeline is accurate and efficient compared to existing methods with an overall translation error of 2.05%, down from 2.78% from the previously best published method, running at 12.5ms per frame without need of environmental specific training.
CorAl -- Are the point clouds Correctly Aligned?
Sep 20, 2021
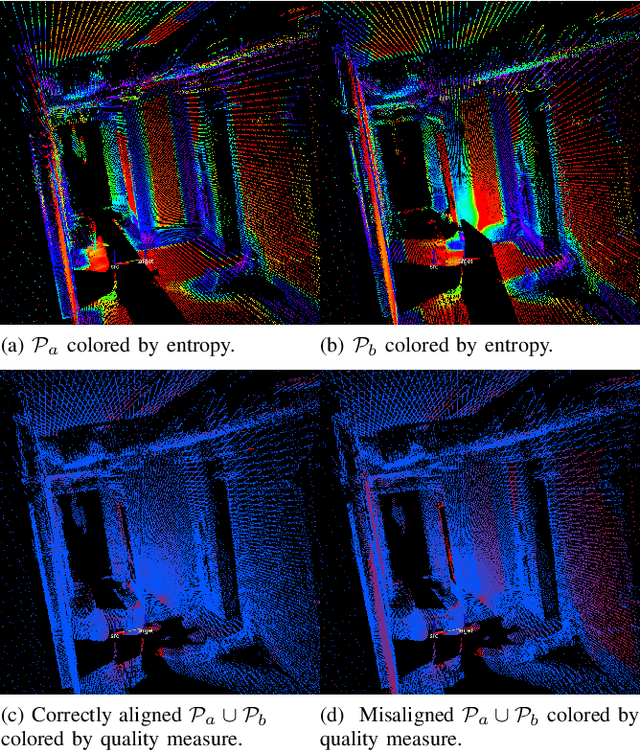
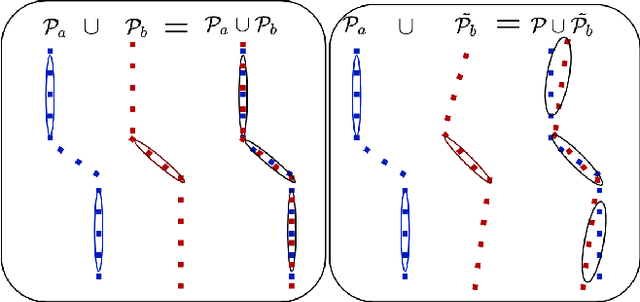
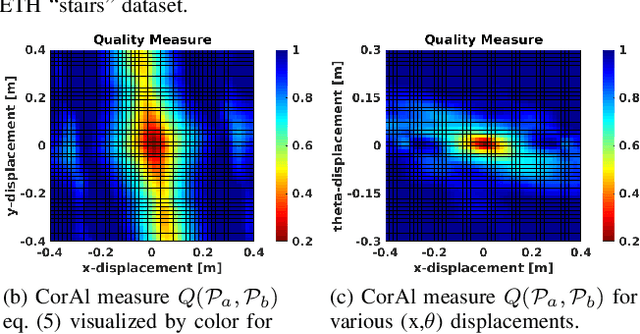
In robotics perception, numerous tasks rely on point cloud registration. However, currently there is no method that can automatically detect misaligned point clouds reliably and without environment-specific parameters. We propose "CorAl", an alignment quality measure and alignment classifier for point cloud pairs, which facilitates the ability to introspectively assess the performance of registration. CorAl compares the joint and the separate entropy of the two point clouds. The separate entropy provides a measure of the entropy that can be expected to be inherent to the environment. The joint entropy should therefore not be substantially higher if the point clouds are properly aligned. Computing the expected entropy makes the method sensitive also to small alignment errors, which are particularly hard to detect, and applicable in a range of different environments. We found that CorAl is able to detect small alignment errors in previously unseen environments with an accuracy of 95% and achieve a substantial improvement to previous methods.
BFAR-Bounded False Alarm Rate detector for improved radar odometry estimation
Sep 20, 2021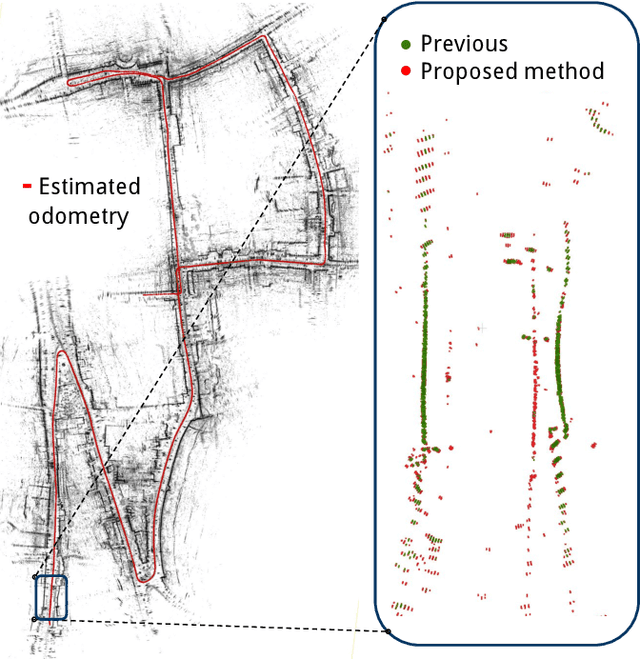
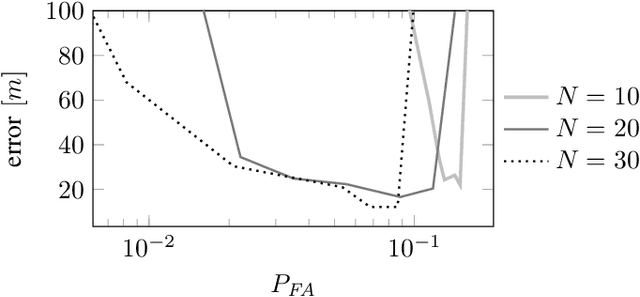
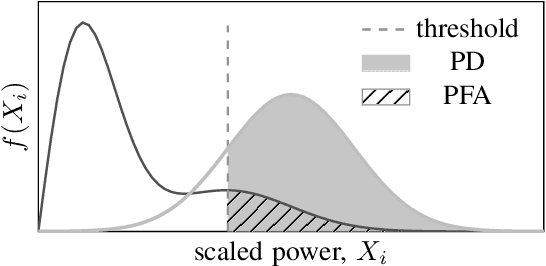
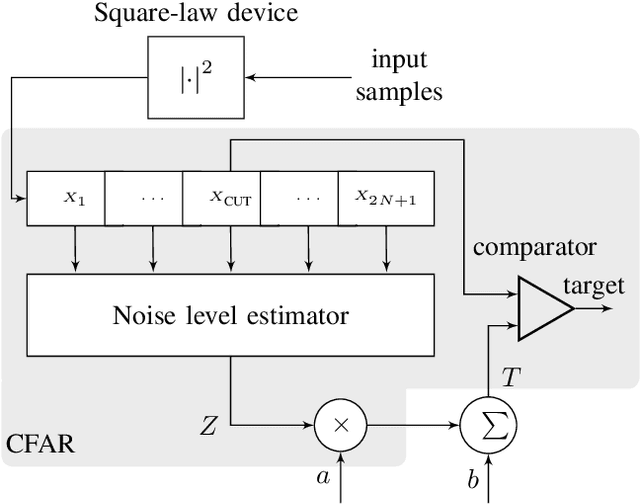
This paper presents a new detector for filtering noise from true detections in radar data, which improves the state of the art in radar odometry. Scanning Frequency-Modulated Continuous Wave (FMCW) radars can be useful for localization and mapping in low visibility, but return a lot of noise compared to (more commonly used) lidar, which makes the detection task more challenging. Our Bounded False-Alarm Rate (BFAR) detector is different from the classical Constant False-Alarm Rate (CFAR) detector in that it applies an affine transformation on the estimated noise level after which the parameters that minimize the estimation error can be learned. BFAR is an optimized combination between CFAR and fixed-level thresholding. Only a single parameter needs to be learned from a training dataset. We apply BFAR to the use case of radar odometry, and adapt a state-of-the-art odometry pipeline (CFEAR), replacing its original conservative filtering with BFAR. In this way we reduce the state-of-the-art translation/rotation odometry errors from 1.76%/0.5deg/100 m to 1.55%/0.46deg/100 m; an improvement of 12.5%.
CFEAR Radarodometry -- Conservative Filtering for Efficient and Accurate Radar Odometry
May 04, 2021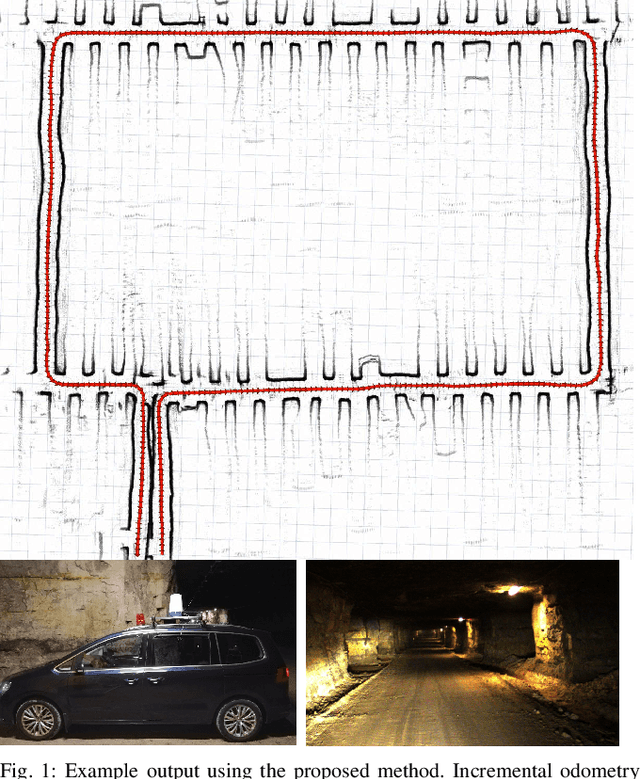
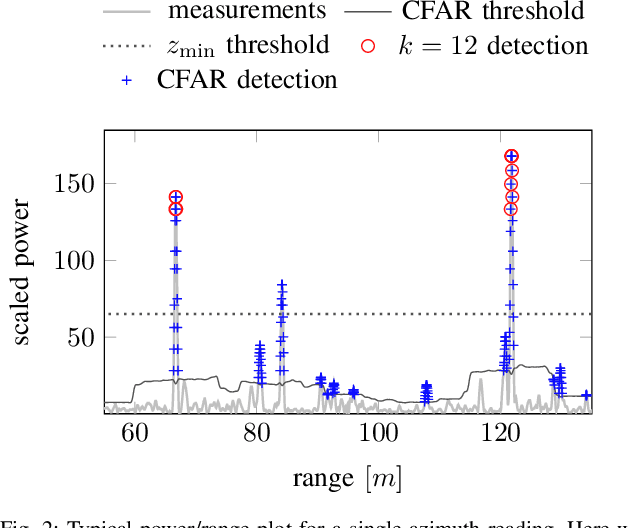
This paper presents the accurate, highly efficient, and learning-free method CFEAR Radarodometry for large-scale radar odometry estimation. By using a filtering technique that keeps the k strongest returns per azimuth and by additionally filtering the radar data in Cartesian space, we are able to compute a sparse set of oriented surface points for efficient and accurate scan matching. Registration is carried out by minimizing a point-to-line metric and robustness to outliers is achieved using a Huber loss. We were able to additionally reduce drift by jointly registering the latest scan to a history of keyframes and found that our odometry method generalizes to different sensor models and datasets without changing a single parameter. We evaluate our method in three widely different environments and demonstrate an improvement over spatially cross-validated state-of-the-art with an overall translation error of 1.76% in a public urban radar odometry benchmark, running at 55Hz merely on a single laptop CPU thread.