 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCorAl -- Are the point clouds Correctly Aligned?
Sep 20, 2021
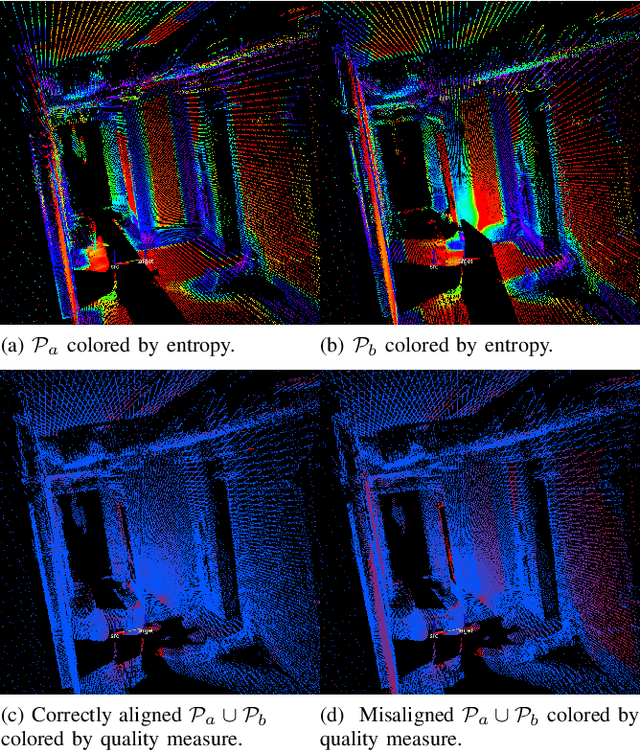
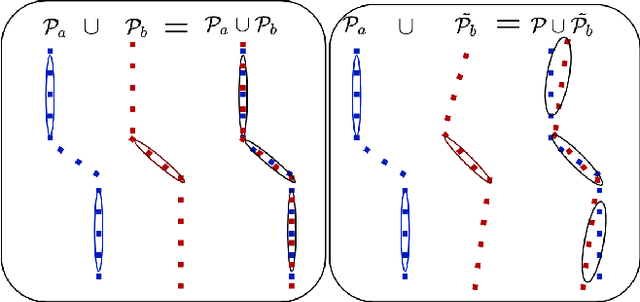
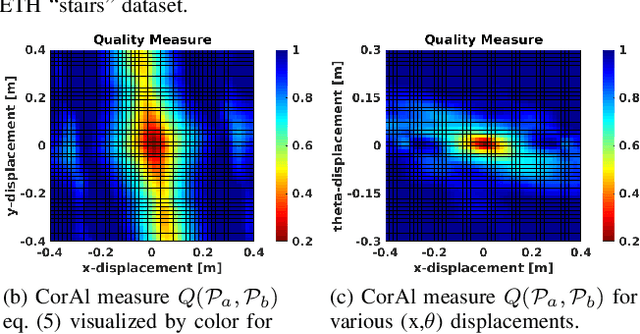
In robotics perception, numerous tasks rely on point cloud registration. However, currently there is no method that can automatically detect misaligned point clouds reliably and without environment-specific parameters. We propose "CorAl", an alignment quality measure and alignment classifier for point cloud pairs, which facilitates the ability to introspectively assess the performance of registration. CorAl compares the joint and the separate entropy of the two point clouds. The separate entropy provides a measure of the entropy that can be expected to be inherent to the environment. The joint entropy should therefore not be substantially higher if the point clouds are properly aligned. Computing the expected entropy makes the method sensitive also to small alignment errors, which are particularly hard to detect, and applicable in a range of different environments. We found that CorAl is able to detect small alignment errors in previously unseen environments with an accuracy of 95% and achieve a substantial improvement to previous methods.
Novel Force Estimation-based Bilateral Teleoperation applying Type-2 Fuzzy logic and Moving Horizon Estimation
May 17, 2018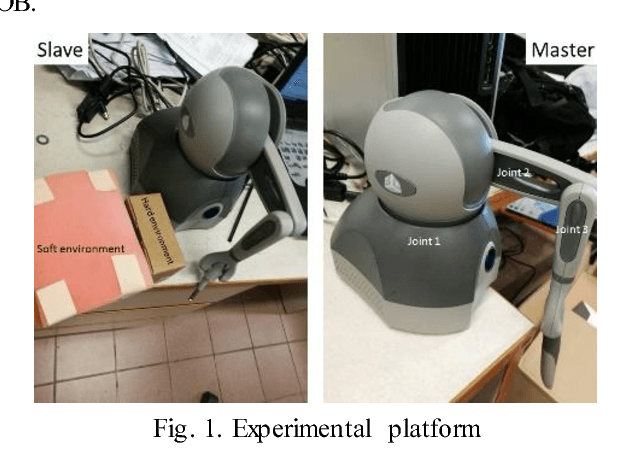
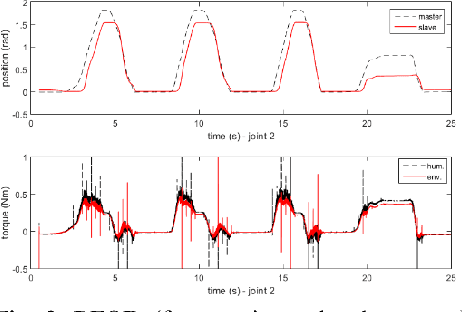
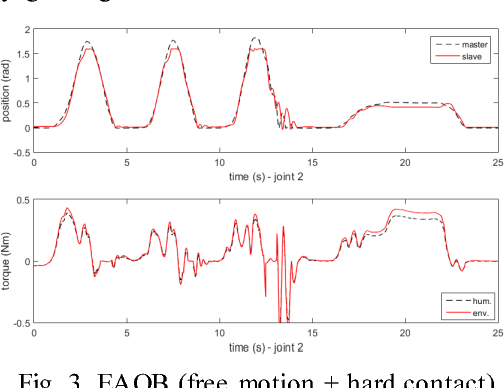
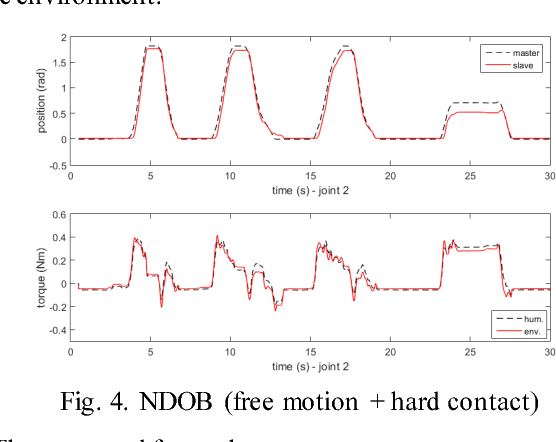
This paper develops a novel force observer for bilateral teleoperation systems. Type-2 fuzzy logic is used to describe the overall dynamic system, and Moving Horizon Estimation (MHE) is employed to assess clean states as well as the values of dynamic uncertainties, and simultaneously filter out the measurement noises, which guarantee the high degree of accuracy for the observed forces. Compared with the existing methods, the proposed force observer can run without knowing exact mathematical dynamic functions and is robust to different kinds of noises. A force-reflection four-channel teleoperation control laws is also proposed that involving the observed environmental and human force to provide the highly accurate force tracking between the master and the slave in the presence of time delays. Finally, experiments based on two haptic devices demonstrate the superiority of the proposed method through the comparisons with multiple state-to-the-art force observers.