 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWhat If We Simply Swap the Two Text Fragments? A Straightforward yet Effective Way to Test the Robustness of Methods to Confounding Signals in Nature Language Inference Tasks
Sep 07, 2018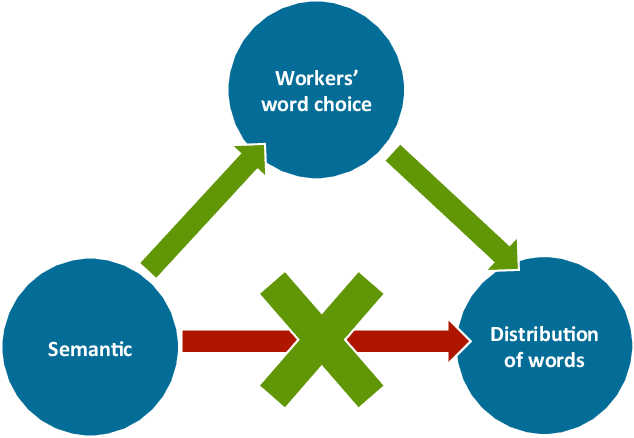
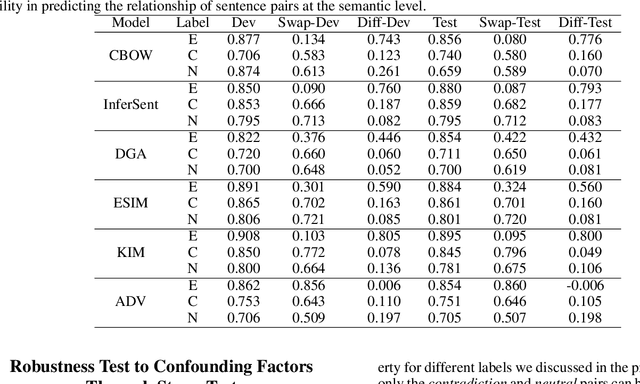
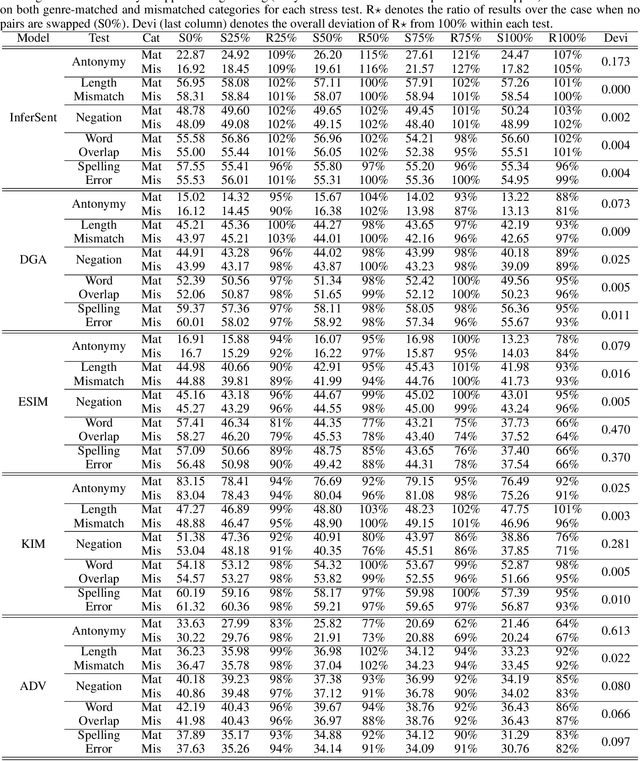

Nature language inference (NLI) task is a predictive task of determining the inference relationship of a pair of natural language sentences. With the increasing popularity of NLI, many state-of-the-art predictive models have been proposed with impressive performances. However, several works have noticed the statistical irregularities in the collected NLI data set that may result in an over-estimated performance of these models and proposed remedies. In this paper, we further investigate the statistical irregularities, what we refer as confounding factors, of the NLI data sets. With the belief that some NLI labels should preserve under swapping operations, we propose a simple yet effective way (swapping the two text fragments) of evaluating the NLI predictive models that naturally mitigate the observed problems. Further, we continue to train the predictive models with our swapping manner and propose to use the deviation of the model's evaluation performances under different percentages of training text fragments to be swapped to describe the robustness of a predictive model. Our evaluation metrics leads to some interesting understandings of recent published NLI methods. Finally, we also apply the swapping operation on NLI models to see the effectiveness of this straightforward method in mitigating the confounding factor problems in training generic sentence embeddings for other NLP transfer tasks.
Novel Force Estimation-based Bilateral Teleoperation applying Type-2 Fuzzy logic and Moving Horizon Estimation
May 17, 2018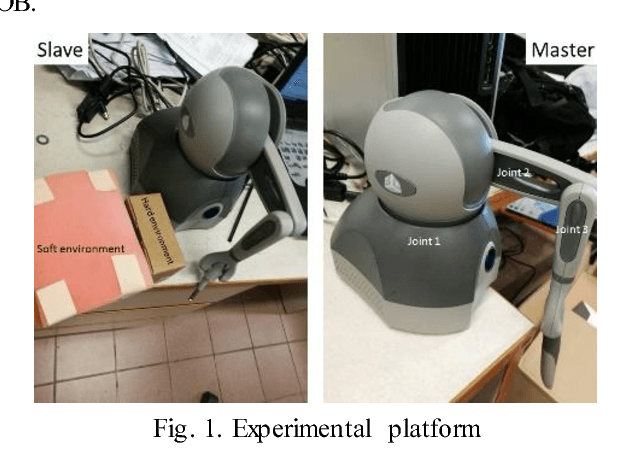
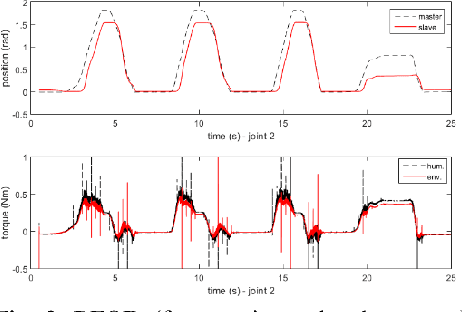
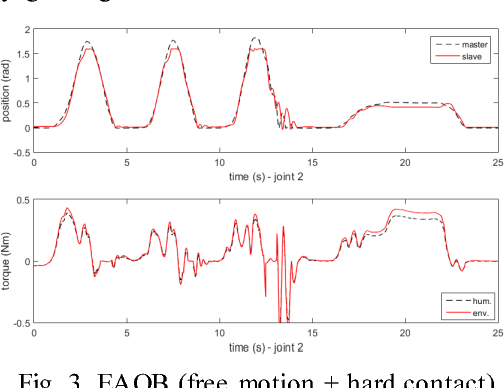
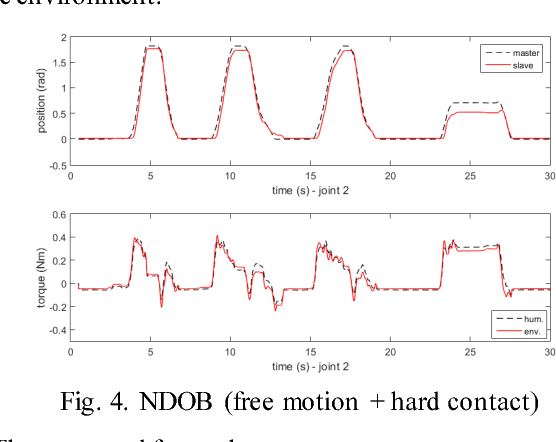
This paper develops a novel force observer for bilateral teleoperation systems. Type-2 fuzzy logic is used to describe the overall dynamic system, and Moving Horizon Estimation (MHE) is employed to assess clean states as well as the values of dynamic uncertainties, and simultaneously filter out the measurement noises, which guarantee the high degree of accuracy for the observed forces. Compared with the existing methods, the proposed force observer can run without knowing exact mathematical dynamic functions and is robust to different kinds of noises. A force-reflection four-channel teleoperation control laws is also proposed that involving the observed environmental and human force to provide the highly accurate force tracking between the master and the slave in the presence of time delays. Finally, experiments based on two haptic devices demonstrate the superiority of the proposed method through the comparisons with multiple state-to-the-art force observers.