 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCFEAR Radarodometry -- Conservative Filtering for Efficient and Accurate Radar Odometry
Paper and Code
May 04, 2021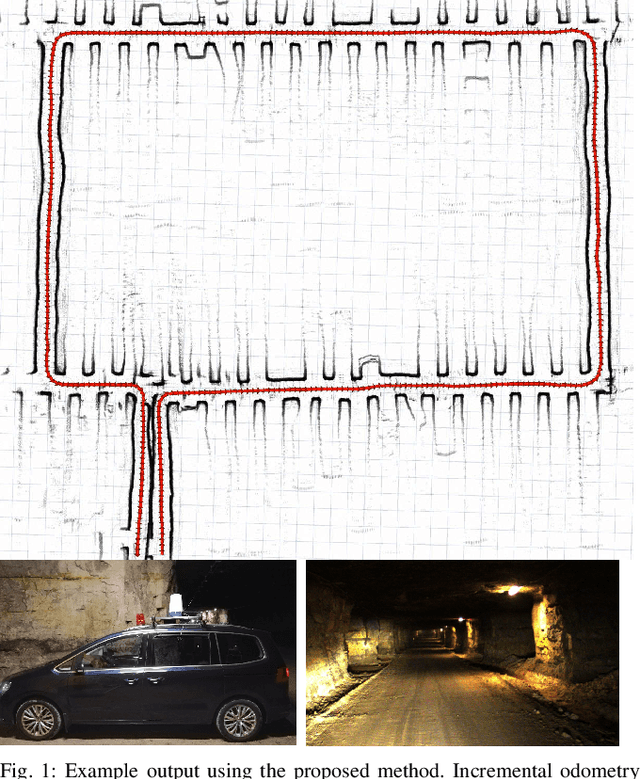
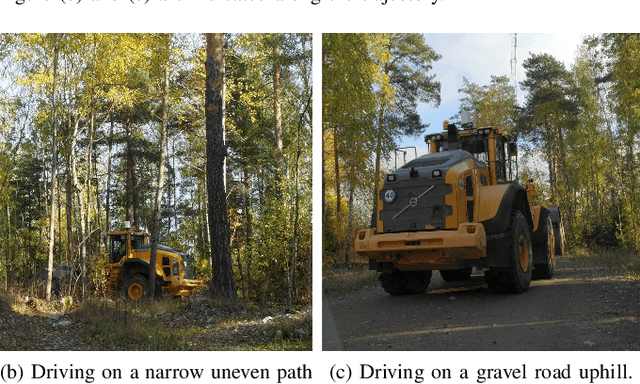
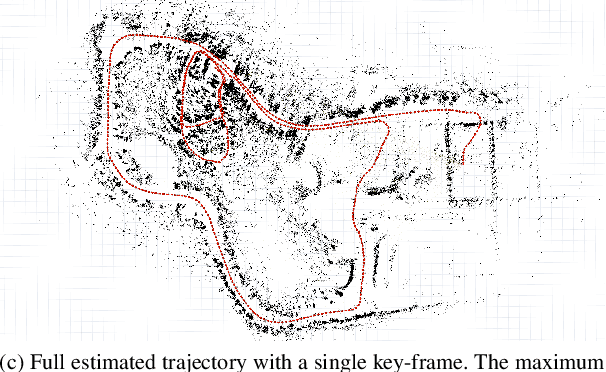
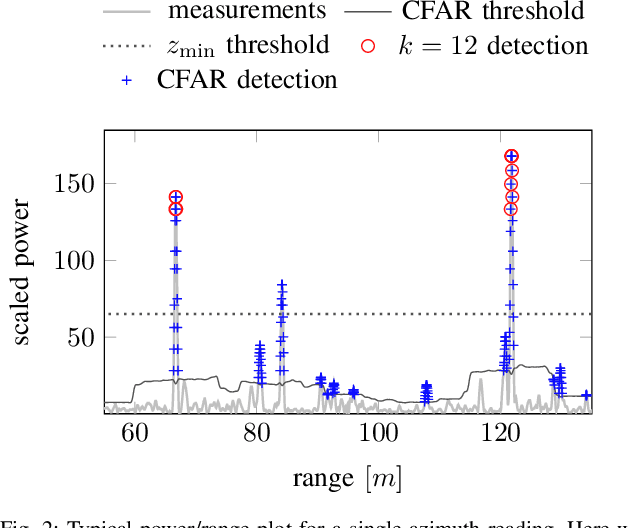
This paper presents the accurate, highly efficient, and learning-free method CFEAR Radarodometry for large-scale radar odometry estimation. By using a filtering technique that keeps the k strongest returns per azimuth and by additionally filtering the radar data in Cartesian space, we are able to compute a sparse set of oriented surface points for efficient and accurate scan matching. Registration is carried out by minimizing a point-to-line metric and robustness to outliers is achieved using a Huber loss. We were able to additionally reduce drift by jointly registering the latest scan to a history of keyframes and found that our odometry method generalizes to different sensor models and datasets without changing a single parameter. We evaluate our method in three widely different environments and demonstrate an improvement over spatially cross-validated state-of-the-art with an overall translation error of 1.76% in a public urban radar odometry benchmark, running at 55Hz merely on a single laptop CPU thread.