 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLidar-level localization with radar? The CFEAR approach to accurate, fast and robust large-scale radar odometry in diverse environments
Nov 07, 2022



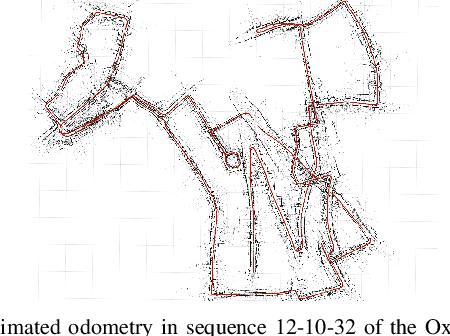
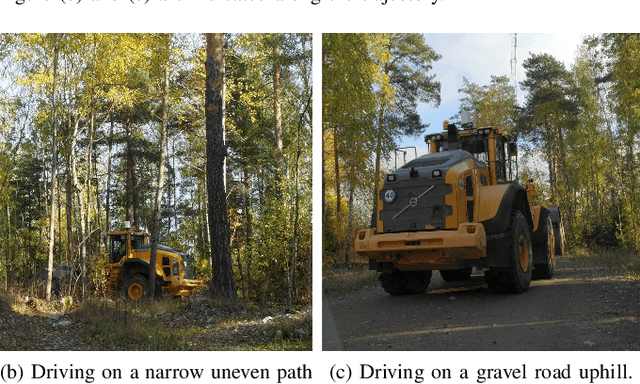
This paper presents an accurate, highly efficient, and learning-free method for large-scale odometry estimation using spinning radar, empirically found to generalize well across very diverse environments -- outdoors, from urban to woodland, and indoors in warehouses and mines - without changing parameters. Our method integrates motion compensation within a sweep with one-to-many scan registration that minimizes distances between nearby oriented surface points and mitigates outliers with a robust loss function. Extending our previous approach CFEAR, we present an in-depth investigation on a wider range of data sets, quantifying the importance of filtering, resolution, registration cost and loss functions, keyframe history, and motion compensation. We present a new solving strategy and configuration that overcomes previous issues with sparsity and bias, and improves our state-of-the-art by 38%, thus, surprisingly, outperforming radar SLAM and approaching lidar SLAM. The most accurate configuration achieves 1.09% error at 5Hz on the Oxford benchmark, and the fastest achieves 1.79% error at 160Hz.
Oriented surface points for efficient and accurate radar odometry
Sep 21, 2021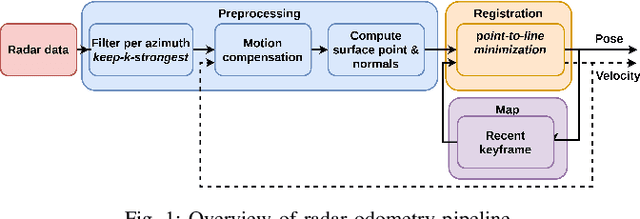
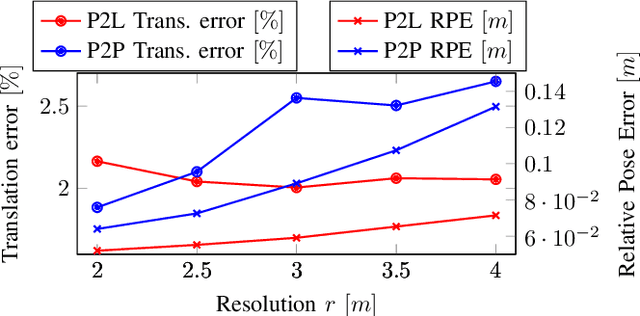

This paper presents an efficient and accurate radar odometry pipeline for large-scale localization. We propose a radar filter that keeps only the strongest reflections per-azimuth that exceeds the expected noise level. The filtered radar data is used to incrementally estimate odometry by registering the current scan with a nearby keyframe. By modeling local surfaces, we were able to register scans by minimizing a point-to-line metric and accurately estimate odometry from sparse point sets, hence improving efficiency. Specifically, we found that a point-to-line metric yields significant improvements compared to a point-to-point metric when matching sparse sets of surface points. Preliminary results from an urban odometry benchmark show that our odometry pipeline is accurate and efficient compared to existing methods with an overall translation error of 2.05%, down from 2.78% from the previously best published method, running at 12.5ms per frame without need of environmental specific training.
BFAR-Bounded False Alarm Rate detector for improved radar odometry estimation
Sep 20, 2021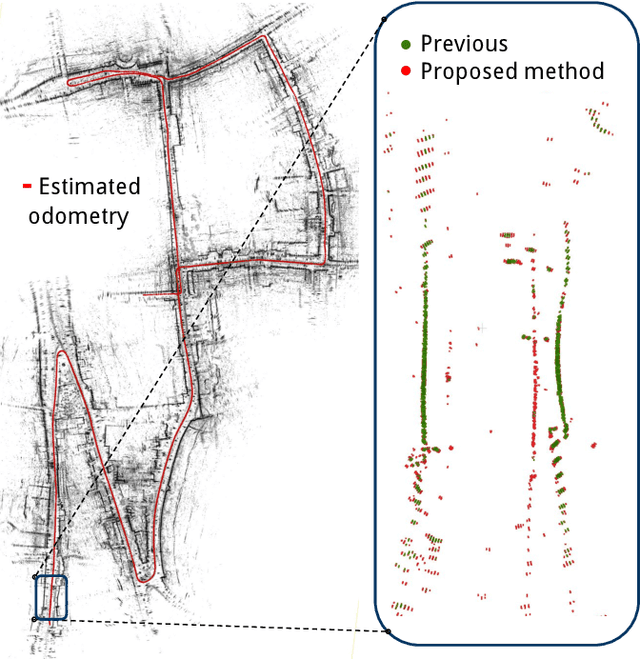
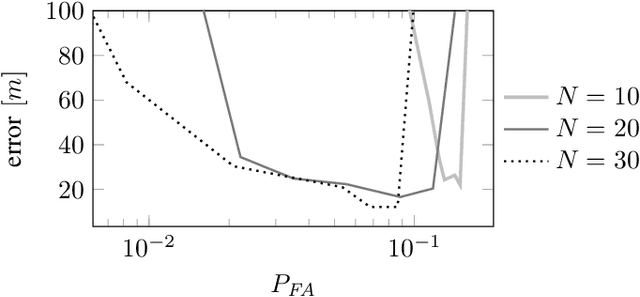
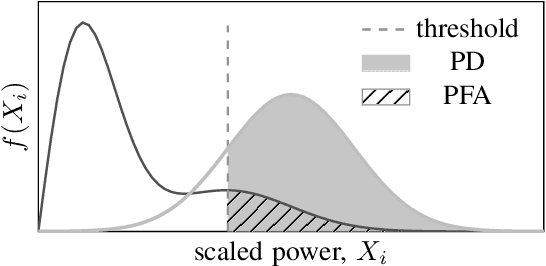
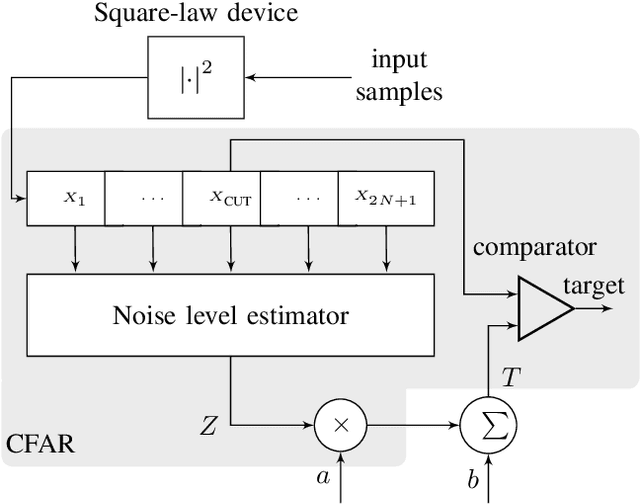
This paper presents a new detector for filtering noise from true detections in radar data, which improves the state of the art in radar odometry. Scanning Frequency-Modulated Continuous Wave (FMCW) radars can be useful for localization and mapping in low visibility, but return a lot of noise compared to (more commonly used) lidar, which makes the detection task more challenging. Our Bounded False-Alarm Rate (BFAR) detector is different from the classical Constant False-Alarm Rate (CFAR) detector in that it applies an affine transformation on the estimated noise level after which the parameters that minimize the estimation error can be learned. BFAR is an optimized combination between CFAR and fixed-level thresholding. Only a single parameter needs to be learned from a training dataset. We apply BFAR to the use case of radar odometry, and adapt a state-of-the-art odometry pipeline (CFEAR), replacing its original conservative filtering with BFAR. In this way we reduce the state-of-the-art translation/rotation odometry errors from 1.76%/0.5deg/100 m to 1.55%/0.46deg/100 m; an improvement of 12.5%.
CFEAR Radarodometry -- Conservative Filtering for Efficient and Accurate Radar Odometry
May 04, 2021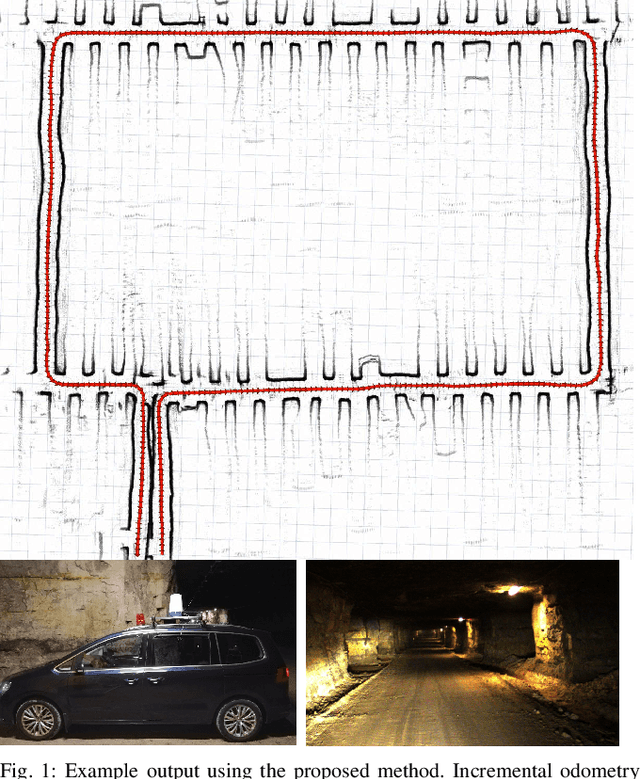
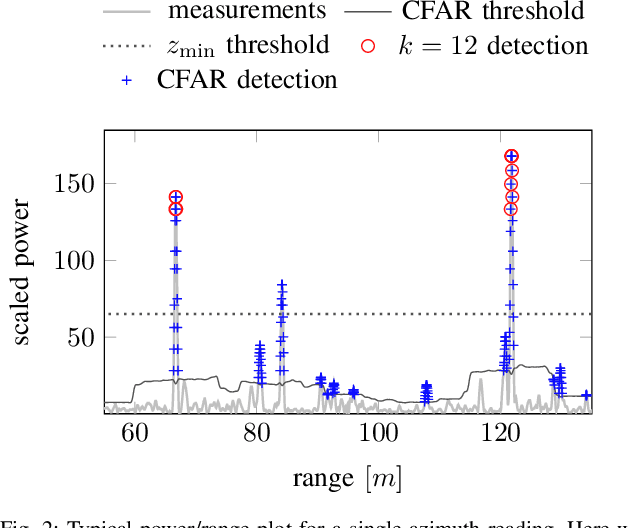
This paper presents the accurate, highly efficient, and learning-free method CFEAR Radarodometry for large-scale radar odometry estimation. By using a filtering technique that keeps the k strongest returns per azimuth and by additionally filtering the radar data in Cartesian space, we are able to compute a sparse set of oriented surface points for efficient and accurate scan matching. Registration is carried out by minimizing a point-to-line metric and robustness to outliers is achieved using a Huber loss. We were able to additionally reduce drift by jointly registering the latest scan to a history of keyframes and found that our odometry method generalizes to different sensor models and datasets without changing a single parameter. We evaluate our method in three widely different environments and demonstrate an improvement over spatially cross-validated state-of-the-art with an overall translation error of 1.76% in a public urban radar odometry benchmark, running at 55Hz merely on a single laptop CPU thread.