 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNTIRE 2024 Challenge on Night Photography Rendering
Jun 18, 2024


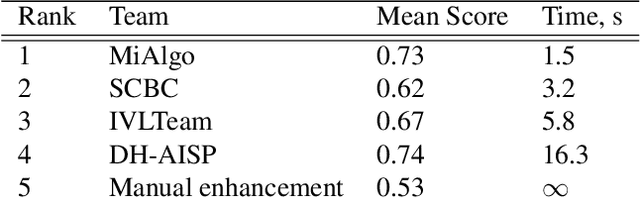
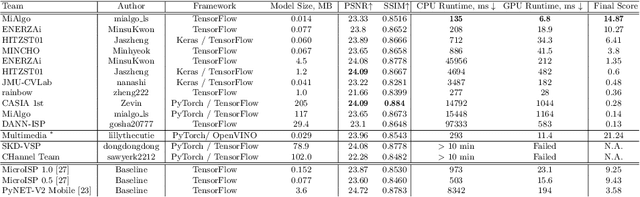
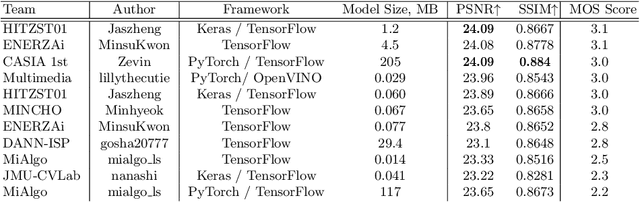
This paper presents a review of the NTIRE 2024 challenge on night photography rendering. The goal of the challenge was to find solutions that process raw camera images taken in nighttime conditions, and thereby produce a photo-quality output images in the standard RGB (sRGB) space. Unlike the previous year's competition, the challenge images were collected with a mobile phone and the speed of algorithms was also measured alongside the quality of their output. To evaluate the results, a sufficient number of viewers were asked to assess the visual quality of the proposed solutions, considering the subjective nature of the task. There were 2 nominations: quality and efficiency. Top 5 solutions in terms of output quality were sorted by evaluation time (see Fig. 1). The top ranking participants' solutions effectively represent the state-of-the-art in nighttime photography rendering. More results can be found at https://nightimaging.org.
MIPI 2024 Challenge on Nighttime Flare Removal: Methods and Results
Apr 30, 2024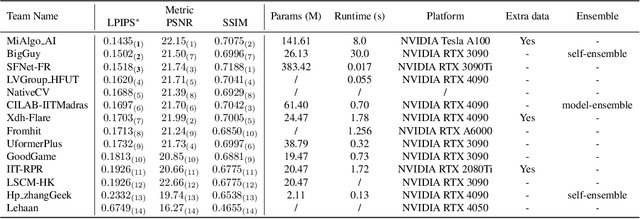
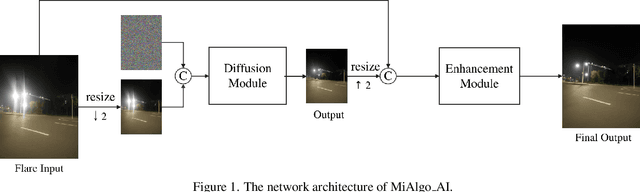
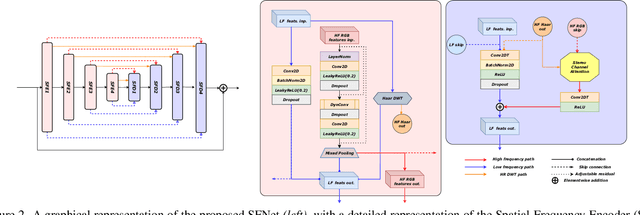
The increasing demand for computational photography and imaging on mobile platforms has led to the widespread development and integration of advanced image sensors with novel algorithms in camera systems. However, the scarcity of high-quality data for research and the rare opportunity for in-depth exchange of views from industry and academia constrain the development of mobile intelligent photography and imaging (MIPI). Building on the achievements of the previous MIPI Workshops held at ECCV 2022 and CVPR 2023, we introduce our third MIPI challenge including three tracks focusing on novel image sensors and imaging algorithms. In this paper, we summarize and review the Nighttime Flare Removal track on MIPI 2024. In total, 170 participants were successfully registered, and 14 teams submitted results in the final testing phase. The developed solutions in this challenge achieved state-of-the-art performance on Nighttime Flare Removal. More details of this challenge and the link to the dataset can be found at https://mipi-challenge.org/MIPI2024/.
Learning Real-World Image De-Weathering with Imperfect Supervision
Oct 23, 2023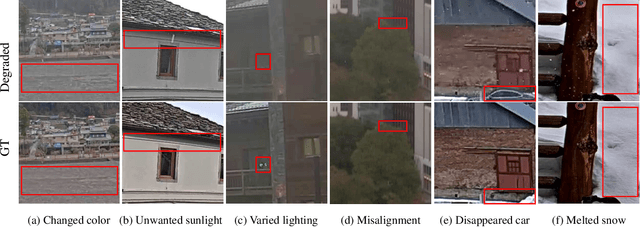
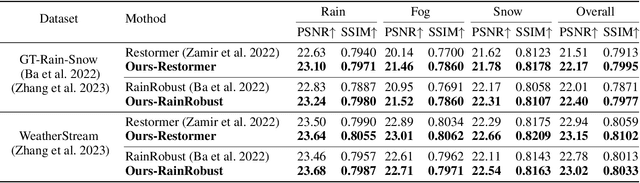
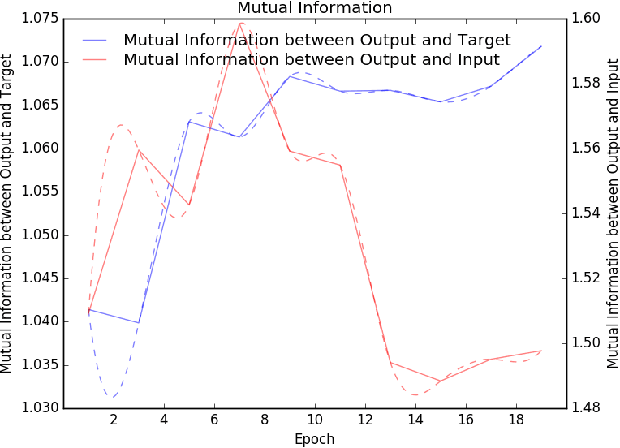
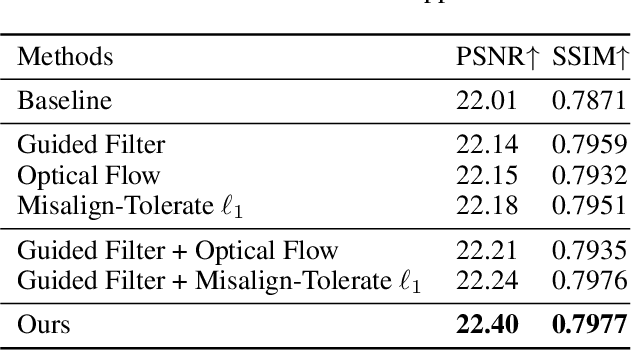
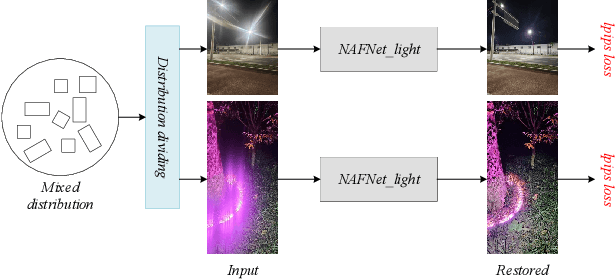
Real-world image de-weathering aims at removing various undesirable weather-related artifacts. Owing to the impossibility of capturing image pairs concurrently, existing real-world de-weathering datasets often exhibit inconsistent illumination, position, and textures between the ground-truth images and the input degraded images, resulting in imperfect supervision. Such non-ideal supervision negatively affects the training process of learning-based de-weathering methods. In this work, we attempt to address the problem with a unified solution for various inconsistencies. Specifically, inspired by information bottleneck theory, we first develop a Consistent Label Constructor (CLC) to generate a pseudo-label as consistent as possible with the input degraded image while removing most weather-related degradations. In particular, multiple adjacent frames of the current input are also fed into CLC to enhance the pseudo-label. Then we combine the original imperfect labels and pseudo-labels to jointly supervise the de-weathering model by the proposed Information Allocation Strategy (IAS). During testing, only the de-weathering model is used for inference. Experiments on two real-world de-weathering datasets show that our method helps existing de-weathering models achieve better performance. Codes are available at https://github.com/1180300419/imperfect-deweathering.
Self-Supervised High Dynamic Range Imaging with Multi-Exposure Images in Dynamic Scenes
Oct 03, 2023



Merging multi-exposure images is a common approach for obtaining high dynamic range (HDR) images, with the primary challenge being the avoidance of ghosting artifacts in dynamic scenes. Recent methods have proposed using deep neural networks for deghosting. However, the methods typically rely on sufficient data with HDR ground-truths, which are difficult and costly to collect. In this work, to eliminate the need for labeled data, we propose SelfHDR, a self-supervised HDR reconstruction method that only requires dynamic multi-exposure images during training. Specifically, SelfHDR learns a reconstruction network under the supervision of two complementary components, which can be constructed from multi-exposure images and focus on HDR color as well as structure, respectively. The color component is estimated from aligned multi-exposure images, while the structure one is generated through a structure-focused network that is supervised by the color component and an input reference (\eg, medium-exposure) image. During testing, the learned reconstruction network is directly deployed to predict an HDR image. Experiments on real-world images demonstrate our SelfHDR achieves superior results against the state-of-the-art self-supervised methods, and comparable performance to supervised ones. Codes are available at https://github.com/cszhilu1998/SelfHDR
Beyond Image Borders: Learning Feature Extrapolation for Unbounded Image Composition
Sep 21, 2023For improving image composition and aesthetic quality, most existing methods modulate the captured images by striking out redundant content near the image borders. However, such image cropping methods are limited in the range of image views. Some methods have been suggested to extrapolate the images and predict cropping boxes from the extrapolated image. Nonetheless, the synthesized extrapolated regions may be included in the cropped image, making the image composition result not real and potentially with degraded image quality. In this paper, we circumvent this issue by presenting a joint framework for both unbounded recommendation of camera view and image composition (i.e., UNIC). In this way, the cropped image is a sub-image of the image acquired by the predicted camera view, and thus can be guaranteed to be real and consistent in image quality. Specifically, our framework takes the current camera preview frame as input and provides a recommendation for view adjustment, which contains operations unlimited by the image borders, such as zooming in or out and camera movement. To improve the prediction accuracy of view adjustment prediction, we further extend the field of view by feature extrapolation. After one or several times of view adjustments, our method converges and results in both a camera view and a bounding box showing the image composition recommendation. Extensive experiments are conducted on the datasets constructed upon existing image cropping datasets, showing the effectiveness of our UNIC in unbounded recommendation of camera view and image composition. The source code, dataset, and pretrained models is available at https://github.com/liuxiaoyu1104/UNIC.
NTIRE 2023 Quality Assessment of Video Enhancement Challenge
Jul 19, 2023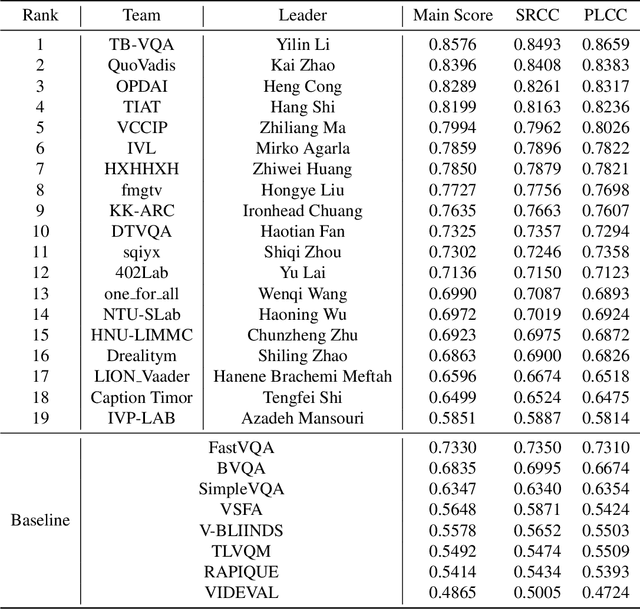
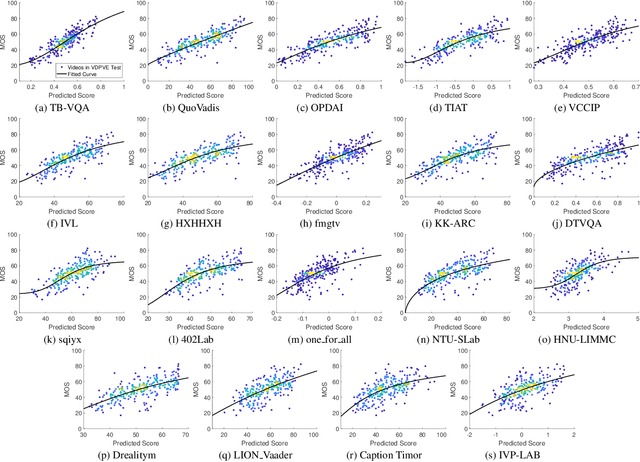
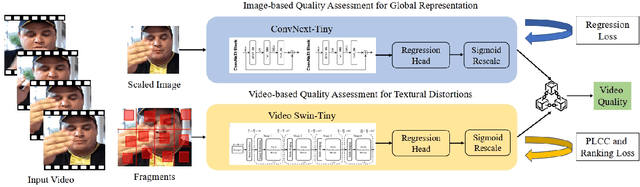

This paper reports on the NTIRE 2023 Quality Assessment of Video Enhancement Challenge, which will be held in conjunction with the New Trends in Image Restoration and Enhancement Workshop (NTIRE) at CVPR 2023. This challenge is to address a major challenge in the field of video processing, namely, video quality assessment (VQA) for enhanced videos. The challenge uses the VQA Dataset for Perceptual Video Enhancement (VDPVE), which has a total of 1211 enhanced videos, including 600 videos with color, brightness, and contrast enhancements, 310 videos with deblurring, and 301 deshaked videos. The challenge has a total of 167 registered participants. 61 participating teams submitted their prediction results during the development phase, with a total of 3168 submissions. A total of 176 submissions were submitted by 37 participating teams during the final testing phase. Finally, 19 participating teams submitted their models and fact sheets, and detailed the methods they used. Some methods have achieved better results than baseline methods, and the winning methods have demonstrated superior prediction performance.
Self-supervised Learning to Bring Dual Reversed Rolling Shutter Images Alive
May 31, 2023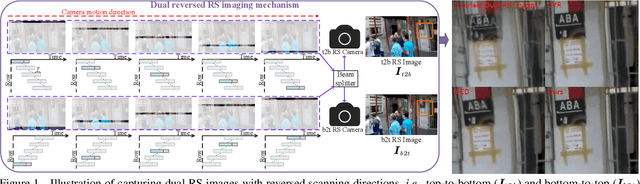

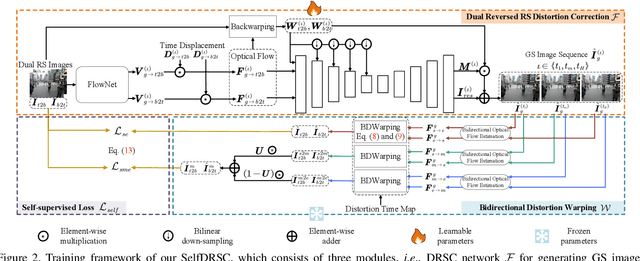
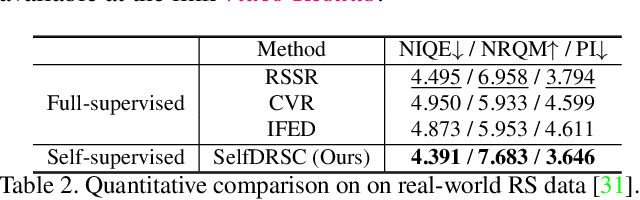
Modern consumer cameras usually employ the rolling shutter (RS) mechanism, where images are captured by scanning scenes row-by-row, yielding RS distortions for dynamic scenes. To correct RS distortions, existing methods adopt a fully supervised learning manner, where high framerate global shutter (GS) images should be collected as ground-truth supervision. In this paper, we propose a Self-supervised learning framework for Dual reversed RS distortions Correction (SelfDRSC), where a DRSC network can be learned to generate a high framerate GS video only based on dual RS images with reversed distortions. In particular, a bidirectional distortion warping module is proposed for reconstructing dual reversed RS images, and then a self-supervised loss can be deployed to train DRSC network by enhancing the cycle consistency between input and reconstructed dual reversed RS images. Besides start and end RS scanning time, GS images at arbitrary intermediate scanning time can also be supervised in SelfDRSC, thus enabling the learned DRSC network to generate a high framerate GS video. Moreover, a simple yet effective self-distillation strategy is introduced in self-supervised loss for mitigating boundary artifacts in generated GS images. On synthetic dataset, SelfDRSC achieves better or comparable quantitative metrics in comparison to state-of-the-art methods trained in the full supervision manner. On real-world RS cases, our SelfDRSC can produce high framerate GS videos with finer correction textures and better temporary consistency. The source code and trained models are made publicly available at https://github.com/shangwei5/SelfDRSC.
Spatially Adaptive Self-Supervised Learning for Real-World Image Denoising
Mar 27, 2023Significant progress has been made in self-supervised image denoising (SSID) in the recent few years. However, most methods focus on dealing with spatially independent noise, and they have little practicality on real-world sRGB images with spatially correlated noise. Although pixel-shuffle downsampling has been suggested for breaking the noise correlation, it breaks the original information of images, which limits the denoising performance. In this paper, we propose a novel perspective to solve this problem, i.e., seeking for spatially adaptive supervision for real-world sRGB image denoising. Specifically, we take into account the respective characteristics of flat and textured regions in noisy images, and construct supervisions for them separately. For flat areas, the supervision can be safely derived from non-adjacent pixels, which are much far from the current pixel for excluding the influence of the noise-correlated ones. And we extend the blind-spot network to a blind-neighborhood network (BNN) for providing supervision on flat areas. For textured regions, the supervision has to be closely related to the content of adjacent pixels. And we present a locally aware network (LAN) to meet the requirement, while LAN itself is selectively supervised with the output of BNN. Combining these two supervisions, a denoising network (e.g., U-Net) can be well-trained. Extensive experiments show that our method performs favorably against state-of-the-art SSID methods on real-world sRGB photographs. The code is available at https://github.com/nagejacob/SpatiallyAdaptiveSSID.
Realistic Bokeh Effect Rendering on Mobile GPUs, Mobile AI & AIM 2022 challenge: Report
Nov 07, 2022



As mobile cameras with compact optics are unable to produce a strong bokeh effect, lots of interest is now devoted to deep learning-based solutions for this task. In this Mobile AI challenge, the target was to develop an efficient end-to-end AI-based bokeh effect rendering approach that can run on modern smartphone GPUs using TensorFlow Lite. The participants were provided with a large-scale EBB! bokeh dataset consisting of 5K shallow / wide depth-of-field image pairs captured using the Canon 7D DSLR camera. The runtime of the resulting models was evaluated on the Kirin 9000's Mali GPU that provides excellent acceleration results for the majority of common deep learning ops. A detailed description of all models developed in this challenge is provided in this paper.
Learned Smartphone ISP on Mobile GPUs with Deep Learning, Mobile AI & AIM 2022 Challenge: Report
Nov 07, 2022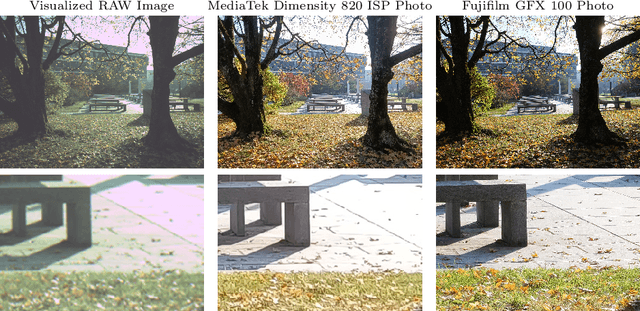
The role of mobile cameras increased dramatically over the past few years, leading to more and more research in automatic image quality enhancement and RAW photo processing. In this Mobile AI challenge, the target was to develop an efficient end-to-end AI-based image signal processing (ISP) pipeline replacing the standard mobile ISPs that can run on modern smartphone GPUs using TensorFlow Lite. The participants were provided with a large-scale Fujifilm UltraISP dataset consisting of thousands of paired photos captured with a normal mobile camera sensor and a professional 102MP medium-format FujiFilm GFX100 camera. The runtime of the resulting models was evaluated on the Snapdragon's 8 Gen 1 GPU that provides excellent acceleration results for the majority of common deep learning ops. The proposed solutions are compatible with all recent mobile GPUs, being able to process Full HD photos in less than 20-50 milliseconds while achieving high fidelity results. A detailed description of all models developed in this challenge is provided in this paper.