 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Tenth NTIRE 2025 Efficient Super-Resolution Challenge Report
Apr 14, 2025This paper presents a comprehensive review of the NTIRE 2025 Challenge on Single-Image Efficient Super-Resolution (ESR). The challenge aimed to advance the development of deep models that optimize key computational metrics, i.e., runtime, parameters, and FLOPs, while achieving a PSNR of at least 26.90 dB on the $\operatorname{DIV2K\_LSDIR\_valid}$ dataset and 26.99 dB on the $\operatorname{DIV2K\_LSDIR\_test}$ dataset. A robust participation saw \textbf{244} registered entrants, with \textbf{43} teams submitting valid entries. This report meticulously analyzes these methods and results, emphasizing groundbreaking advancements in state-of-the-art single-image ESR techniques. The analysis highlights innovative approaches and establishes benchmarks for future research in the field.
Stereo Event-based, 6-DOF Pose Tracking for Uncooperative Spacecraft
Mar 17, 2025Pose tracking of uncooperative spacecraft is an essential technology for space exploration and on-orbit servicing, which remains an open problem. Event cameras possess numerous advantages, such as high dynamic range, high temporal resolution, and low power consumption. These attributes hold the promise of overcoming challenges encountered by conventional cameras, including motion blur and extreme illumination, among others. To address the standard on-orbit observation missions, we propose a line-based pose tracking method for uncooperative spacecraft utilizing a stereo event camera. To begin with, we estimate the wireframe model of uncooperative spacecraft, leveraging the spatio-temporal consistency of stereo event streams for line-based reconstruction. Then, we develop an effective strategy to establish correspondences between events and projected lines of uncooperative spacecraft. Using these correspondences, we formulate the pose tracking as a continuous optimization process over 6-DOF motion parameters, achieved by minimizing event-line distances. Moreover, we construct a stereo event-based uncooperative spacecraft motion dataset, encompassing both simulated and real events. The proposed method is quantitatively evaluated through experiments conducted on our self-collected dataset, demonstrating an improvement in terms of effectiveness and accuracy over competing methods. The code will be open-sourced at https://github.com/Zibin6/SE6PT.
Full-DoF Egomotion Estimation for Event Cameras Using Geometric Solvers
Mar 05, 2025For event cameras, current sparse geometric solvers for egomotion estimation assume that the rotational displacements are known, such as those provided by an IMU. Thus, they can only recover the translational motion parameters. Recovering full-DoF motion parameters using a sparse geometric solver is a more challenging task, and has not yet been investigated. In this paper, we propose several solvers to estimate both rotational and translational velocities within a unified framework. Our method leverages event manifolds induced by line segments. The problem formulations are based on either an incidence relation for lines or a novel coplanarity relation for normal vectors. We demonstrate the possibility of recovering full-DoF egomotion parameters for both angular and linear velocities without requiring extra sensor measurements or motion priors. To achieve efficient optimization, we exploit the Adam framework with a first-order approximation of rotations for quick initialization. Experiments on both synthetic and real-world data demonstrate the effectiveness of our method. The code is available at https://github.com/jizhaox/relpose-event.
Line-based 6-DoF Object Pose Estimation and Tracking With an Event Camera
Aug 06, 2024Pose estimation and tracking of objects is a fundamental application in 3D vision. Event cameras possess remarkable attributes such as high dynamic range, low latency, and resilience against motion blur, which enables them to address challenging high dynamic range scenes or high-speed motion. These features make event cameras an ideal complement over standard cameras for object pose estimation. In this work, we propose a line-based robust pose estimation and tracking method for planar or non-planar objects using an event camera. Firstly, we extract object lines directly from events, then provide an initial pose using a globally-optimal Branch-and-Bound approach, where 2D-3D line correspondences are not known in advance. Subsequently, we utilize event-line matching to establish correspondences between 2D events and 3D models. Furthermore, object poses are refined and continuously tracked by minimizing event-line distances. Events are assigned different weights based on these distances, employing robust estimation algorithms. To evaluate the precision of the proposed methods in object pose estimation and tracking, we have devised and established an event-based moving object dataset. Compared against state-of-the-art methods, the robustness and accuracy of our methods have been validated both on synthetic experiments and the proposed dataset. The source code is available at https://github.com/Zibin6/LOPET.
SYENet: A Simple Yet Effective Network for Multiple Low-Level Vision Tasks with Real-time Performance on Mobile Device
Aug 16, 2023With the rapid development of AI hardware accelerators, applying deep learning-based algorithms to solve various low-level vision tasks on mobile devices has gradually become possible. However, two main problems still need to be solved: task-specific algorithms make it difficult to integrate them into a single neural network architecture, and large amounts of parameters make it difficult to achieve real-time inference. To tackle these problems, we propose a novel network, SYENet, with only $~$6K parameters, to handle multiple low-level vision tasks on mobile devices in a real-time manner. The SYENet consists of two asymmetrical branches with simple building blocks. To effectively connect the results by asymmetrical branches, a Quadratic Connection Unit(QCU) is proposed. Furthermore, to improve performance, a new Outlier-Aware Loss is proposed to process the image. The proposed method proves its superior performance with the best PSNR as compared with other networks in real-time applications such as Image Signal Processing(ISP), Low-Light Enhancement(LLE), and Super-Resolution(SR) with 2K60FPS throughput on Qualcomm 8 Gen 1 mobile SoC(System-on-Chip). Particularly, for ISP task, SYENet got the highest score in MAI 2022 Learned Smartphone ISP challenge.
Learned Smartphone ISP on Mobile GPUs with Deep Learning, Mobile AI & AIM 2022 Challenge: Report
Nov 07, 2022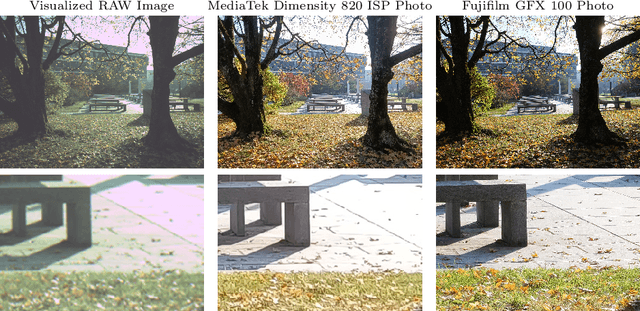
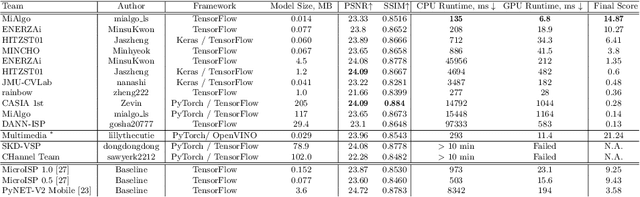
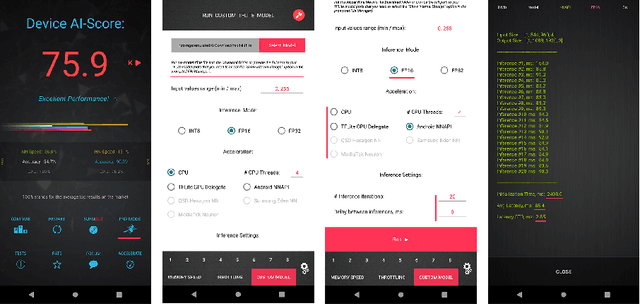
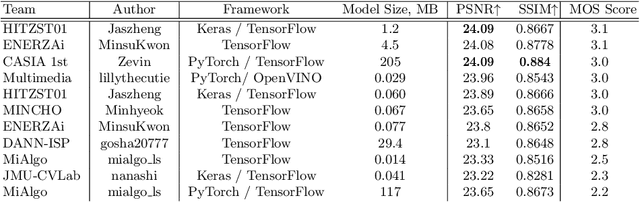
The role of mobile cameras increased dramatically over the past few years, leading to more and more research in automatic image quality enhancement and RAW photo processing. In this Mobile AI challenge, the target was to develop an efficient end-to-end AI-based image signal processing (ISP) pipeline replacing the standard mobile ISPs that can run on modern smartphone GPUs using TensorFlow Lite. The participants were provided with a large-scale Fujifilm UltraISP dataset consisting of thousands of paired photos captured with a normal mobile camera sensor and a professional 102MP medium-format FujiFilm GFX100 camera. The runtime of the resulting models was evaluated on the Snapdragon's 8 Gen 1 GPU that provides excellent acceleration results for the majority of common deep learning ops. The proposed solutions are compatible with all recent mobile GPUs, being able to process Full HD photos in less than 20-50 milliseconds while achieving high fidelity results. A detailed description of all models developed in this challenge is provided in this paper.