 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGRAIL: Generating Humanoid Loco-Manipulation from 3D Assets and Video Priors
Jun 03, 2026Scaling humanoid loco-manipulation requires robot-compatible demonstrations across diverse objects, whole-body motions, and scene geometries, but teleoperation and motion capture are difficult to scale because each collection depends on physical setups, instrumented actors, and robot operation. We present GRAIL, a digital generation pipeline that remains fully virtual until deployment: it composes 3D assets, simulator-ready scenes, and priors from video foundation models (VFMs) to synthesize interactions without rebuilding physical environments or teleoperating the robot. Rather than reconstructing unconstrained in-the-wild videos, GRAIL starts from fully specified 3D configurations in which object geometry, camera parameters, metric scale, environment depth, and a robot-proportioned character are known before video generation and reused during reconstruction. This privileged setup better conditions 4D recovery, allowing model-based object tracking, human motion estimation, and interaction-aware optimization to reconstruct metric 4D human-object interaction (HOI) trajectories with reduced depth ambiguity and morphology mismatch. We retarget the recovered motions to a humanoid robot and train complementary task-general trackers: an object-aware latent adaptor for manipulation and a scene-aware tracker for terrain traversal. GRAIL produces over 20,000 sequences spanning pick-up, object manipulation, sitting, and terrain traversal. Using only GRAIL-generated data, we train egocentric visual policies through a sim-to-real pipeline and deploy them on a Unitree G1 humanoid, achieving 84\% real-world success on diverse object pick-up and 90\% success on stair-climbing.
Feel Robot Feels: Tactile Feedback Array Glove for Dexterous Manipulation
Mar 30, 2026Teleoperation is a key approach for collecting high-quality, physically consistent demonstrations for robotic manipulation. However, teleoperation for dexterous manipulation remains constrained by: (i) inaccurate hand-robot motion mapping, which limits teleoperated dexterity, and (ii) limited tactile feedback that forces vision-dominated interaction and hinders perception of contact geometry and force variation. To address these challenges, we present TAG, a low-cost glove system that integrates precise hand motion capture with high-resolution tactile feedback, enabling effective tactile-in-the-loop dexterous teleoperation. For motion capture, TAG employs a non-contact magnetic sensing design that provides drift-free, electromagnetically robust 21-DoF joint tracking with joint angle estimation errors below 1 degree. Meanwhile, to restore tactile sensation, TAG equips each finger with a 32-actuator tactile array within a compact 2 cm^2 module, allowing operators to directly feel physical interactions at the robot end-effector through spatial activation patterns. Through real-world teleoperation experiments and user studies, we show that TAG enables reliable real-time perception of contact geometry and dynamic force, improves success rates in contact-rich teleoperation tasks, and increases the reliability of demonstration data collection for learning-based manipulation.
One-Policy-Fits-All: Geometry-Aware Action Latents for Cross-Embodiment Manipulation
Mar 15, 2026Cross-embodiment manipulation is crucial for enhancing the scalability of robot manipulation and reducing the high cost of data collection. However, the significant differences between embodiments, such as variations in action spaces and structural disparities, pose challenges for joint training across multiple sources of data. To address this, we propose One-Policy-Fits-All (OPFA), a framework that enables learning a single, versatile policy across multiple embodiments. We first learn a Geometry-Aware Latent Representation (GaLR), which leverages 3D convolution networks and transformers to build a shared latent action space across different embodiments. Then we design a unified latent retargeting decoder that extracts embodiment-specific actions from the latent representations, without any embodiment-specific decoder tuning. OPFA enables end-to-end co-training of data from diverse embodiments, including various grippers and dexterous hands with arbitrary degrees of freedom, significantly improving data efficiency and reducing the cost of skill transfer. We conduct extensive experiments across 11 different end-effectors. The results demonstrate that OPFA significantly improves policy performance in diverse settings by leveraging heterogeneous embodiment data. For instance, cross-embodiment co-training can improve success rates by more than 50% compared to single-source training. Moreover, by adding only a few demonstrations from a new embodiment (e.g., eight), OPFA can achieve performance comparable to that of a well-trained model with 72 demonstrations.
VIRAL: Visual Sim-to-Real at Scale for Humanoid Loco-Manipulation
Nov 19, 2025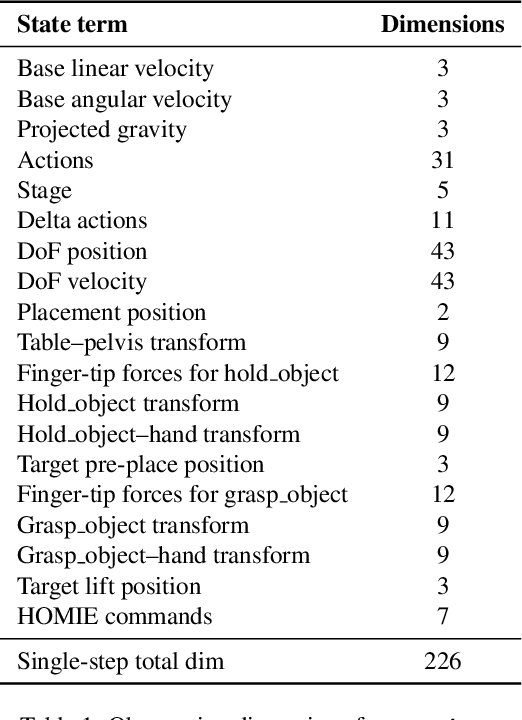
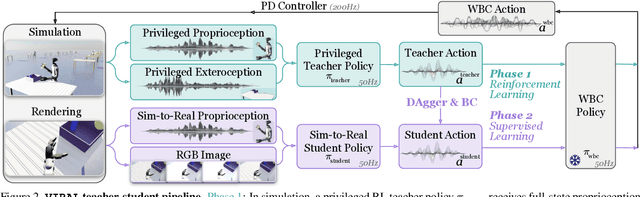
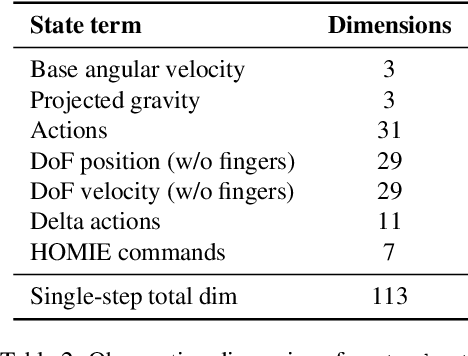
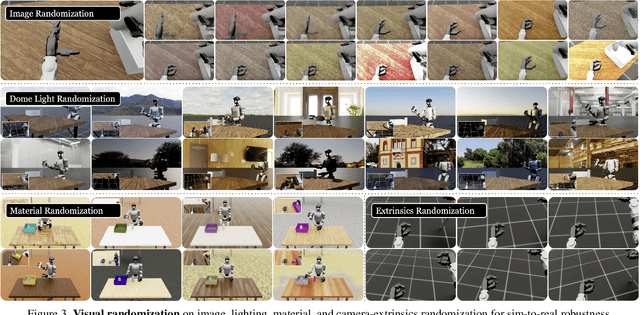
A key barrier to the real-world deployment of humanoid robots is the lack of autonomous loco-manipulation skills. We introduce VIRAL, a visual sim-to-real framework that learns humanoid loco-manipulation entirely in simulation and deploys it zero-shot to real hardware. VIRAL follows a teacher-student design: a privileged RL teacher, operating on full state, learns long-horizon loco-manipulation using a delta action space and reference state initialization. A vision-based student policy is then distilled from the teacher via large-scale simulation with tiled rendering, trained with a mixture of online DAgger and behavior cloning. We find that compute scale is critical: scaling simulation to tens of GPUs (up to 64) makes both teacher and student training reliable, while low-compute regimes often fail. To bridge the sim-to-real gap, VIRAL combines large-scale visual domain randomization over lighting, materials, camera parameters, image quality, and sensor delays--with real-to-sim alignment of the dexterous hands and cameras. Deployed on a Unitree G1 humanoid, the resulting RGB-based policy performs continuous loco-manipulation for up to 54 cycles, generalizing to diverse spatial and appearance variations without any real-world fine-tuning, and approaching expert-level teleoperation performance. Extensive ablations dissect the key design choices required to make RGB-based humanoid loco-manipulation work in practice.
Gallant: Voxel Grid-based Humanoid Locomotion and Local-navigation across 3D Constrained Terrains
Nov 18, 2025Robust humanoid locomotion requires accurate and globally consistent perception of the surrounding 3D environment. However, existing perception modules, mainly based on depth images or elevation maps, offer only partial and locally flattened views of the environment, failing to capture the full 3D structure. This paper presents Gallant, a voxel-grid-based framework for humanoid locomotion and local navigation in 3D constrained terrains. It leverages voxelized LiDAR data as a lightweight and structured perceptual representation, and employs a z-grouped 2D CNN to map this representation to the control policy, enabling fully end-to-end optimization. A high-fidelity LiDAR simulation that dynamically generates realistic observations is developed to support scalable, LiDAR-based training and ensure sim-to-real consistency. Experimental results show that Gallant's broader perceptual coverage facilitates the use of a single policy that goes beyond the limitations of previous methods confined to ground-level obstacles, extending to lateral clutter, overhead constraints, multi-level structures, and narrow passages. Gallant also firstly achieves near 100% success rates in challenging scenarios such as stair climbing and stepping onto elevated platforms through improved end-to-end optimization.
SONIC: Supersizing Motion Tracking for Natural Humanoid Whole-Body Control
Nov 11, 2025Despite the rise of billion-parameter foundation models trained across thousands of GPUs, similar scaling gains have not been shown for humanoid control. Current neural controllers for humanoids remain modest in size, target a limited behavior set, and are trained on a handful of GPUs over several days. We show that scaling up model capacity, data, and compute yields a generalist humanoid controller capable of creating natural and robust whole-body movements. Specifically, we posit motion tracking as a natural and scalable task for humanoid control, leverageing dense supervision from diverse motion-capture data to acquire human motion priors without manual reward engineering. We build a foundation model for motion tracking by scaling along three axes: network size (from 1.2M to 42M parameters), dataset volume (over 100M frames, 700 hours of high-quality motion data), and compute (9k GPU hours). Beyond demonstrating the benefits of scale, we show the practical utility of our model through two mechanisms: (1) a real-time universal kinematic planner that bridges motion tracking to downstream task execution, enabling natural and interactive control, and (2) a unified token space that supports various motion input interfaces, such as VR teleoperation devices, human videos, and vision-language-action (VLA) models, all using the same policy. Scaling motion tracking exhibits favorable properties: performance improves steadily with increased compute and data diversity, and learned representations generalize to unseen motions, establishing motion tracking at scale as a practical foundation for humanoid control.
SMAP: Self-supervised Motion Adaptation for Physically Plausible Humanoid Whole-body Control
May 26, 2025This paper presents a novel framework that enables real-world humanoid robots to maintain stability while performing human-like motion. Current methods train a policy which allows humanoid robots to follow human body using the massive retargeted human data via reinforcement learning. However, due to the heterogeneity between human and humanoid robot motion, directly using retargeted human motion reduces training efficiency and stability. To this end, we introduce SMAP, a novel whole-body tracking framework that bridges the gap between human and humanoid action spaces, enabling accurate motion mimicry by humanoid robots. The core idea is to use a vector-quantized periodic autoencoder to capture generic atomic behaviors and adapt human motion into physically plausible humanoid motion. This adaptation accelerates training convergence and improves stability when handling novel or challenging motions. We then employ a privileged teacher to distill precise mimicry skills into the student policy with a proposed decoupled reward. We conduct experiments in simulation and real world to demonstrate the superiority stability and performance of SMAP over SOTA methods, offering practical guidelines for advancing whole-body control in humanoid robots.
TeleOpBench: A Simulator-Centric Benchmark for Dual-Arm Dexterous Teleoperation
May 19, 2025Teleoperation is a cornerstone of embodied-robot learning, and bimanual dexterous teleoperation in particular provides rich demonstrations that are difficult to obtain with fully autonomous systems. While recent studies have proposed diverse hardware pipelines-ranging from inertial motion-capture gloves to exoskeletons and vision-based interfaces-there is still no unified benchmark that enables fair, reproducible comparison of these systems. In this paper, we introduce TeleOpBench, a simulator-centric benchmark tailored to bimanual dexterous teleoperation. TeleOpBench contains 30 high-fidelity task environments that span pick-and-place, tool use, and collaborative manipulation, covering a broad spectrum of kinematic and force-interaction difficulty. Within this benchmark we implement four representative teleoperation modalities-(i) MoCap, (ii) VR device, (iii) arm-hand exoskeletons, and (iv) monocular vision tracking-and evaluate them with a common protocol and metric suite. To validate that performance in simulation is predictive of real-world behavior, we conduct mirrored experiments on a physical dual-arm platform equipped with two 6-DoF dexterous hands. Across 10 held-out tasks we observe a strong correlation between simulator and hardware performance, confirming the external validity of TeleOpBench. TeleOpBench establishes a common yardstick for teleoperation research and provides an extensible platform for future algorithmic and hardware innovation.
VB-Com: Learning Vision-Blind Composite Humanoid Locomotion Against Deficient Perception
Feb 20, 2025The performance of legged locomotion is closely tied to the accuracy and comprehensiveness of state observations. Blind policies, which rely solely on proprioception, are considered highly robust due to the reliability of proprioceptive observations. However, these policies significantly limit locomotion speed and often require collisions with the terrain to adapt. In contrast, Vision policies allows the robot to plan motions in advance and respond proactively to unstructured terrains with an online perception module. However, perception is often compromised by noisy real-world environments, potential sensor failures, and the limitations of current simulations in presenting dynamic or deformable terrains. Humanoid robots, with high degrees of freedom and inherently unstable morphology, are particularly susceptible to misguidance from deficient perception, which can result in falls or termination on challenging dynamic terrains. To leverage the advantages of both vision and blind policies, we propose VB-Com, a composite framework that enables humanoid robots to determine when to rely on the vision policy and when to switch to the blind policy under perceptual deficiency. We demonstrate that VB-Com effectively enables humanoid robots to traverse challenging terrains and obstacles despite perception deficiencies caused by dynamic terrains or perceptual noise.
HOMIE: Humanoid Loco-Manipulation with Isomorphic Exoskeleton Cockpit
Feb 18, 2025Current humanoid teleoperation systems either lack reliable low-level control policies, or struggle to acquire accurate whole-body control commands, making it difficult to teleoperate humanoids for loco-manipulation tasks. To solve these issues, we propose HOMIE, a novel humanoid teleoperation cockpit integrates a humanoid loco-manipulation policy and a low-cost exoskeleton-based hardware system. The policy enables humanoid robots to walk and squat to specific heights while accommodating arbitrary upper-body poses. This is achieved through our novel reinforcement learning-based training framework that incorporates upper-body pose curriculum, height-tracking reward, and symmetry utilization, without relying on any motion priors. Complementing the policy, the hardware system integrates isomorphic exoskeleton arms, a pair of motion-sensing gloves, and a pedal, allowing a single operator to achieve full control of the humanoid robot. Our experiments show our cockpit facilitates more stable, rapid, and precise humanoid loco-manipulation teleoperation, accelerating task completion and eliminating retargeting errors compared to inverse kinematics-based methods. We also validate the effectiveness of the data collected by our cockpit for imitation learning. Our project is fully open-sourced, demos and code can be found in https://homietele.github.io/.