 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Adaptable Humanoid Control via Adaptive Motion Tracking
Oct 16, 2025Humanoid robots are envisioned to adapt demonstrated motions to diverse real-world conditions while accurately preserving motion patterns. Existing motion prior approaches enable well adaptability with a few motions but often sacrifice imitation accuracy, whereas motion-tracking methods achieve accurate imitation yet require many training motions and a test-time target motion to adapt. To combine their strengths, we introduce AdaMimic, a novel motion tracking algorithm that enables adaptable humanoid control from a single reference motion. To reduce data dependence while ensuring adaptability, our method first creates an augmented dataset by sparsifying the single reference motion into keyframes and applying light editing with minimal physical assumptions. A policy is then initialized by tracking these sparse keyframes to generate dense intermediate motions, and adapters are subsequently trained to adjust tracking speed and refine low-level actions based on the adjustment, enabling flexible time warping that further improves imitation accuracy and adaptability. We validate these significant improvements in our approach in both simulation and the real-world Unitree G1 humanoid robot in multiple tasks across a wide range of adaptation conditions. Videos and code are available at https://taohuang13.github.io/adamimic.github.io/.
VB-Com: Learning Vision-Blind Composite Humanoid Locomotion Against Deficient Perception
Feb 20, 2025The performance of legged locomotion is closely tied to the accuracy and comprehensiveness of state observations. Blind policies, which rely solely on proprioception, are considered highly robust due to the reliability of proprioceptive observations. However, these policies significantly limit locomotion speed and often require collisions with the terrain to adapt. In contrast, Vision policies allows the robot to plan motions in advance and respond proactively to unstructured terrains with an online perception module. However, perception is often compromised by noisy real-world environments, potential sensor failures, and the limitations of current simulations in presenting dynamic or deformable terrains. Humanoid robots, with high degrees of freedom and inherently unstable morphology, are particularly susceptible to misguidance from deficient perception, which can result in falls or termination on challenging dynamic terrains. To leverage the advantages of both vision and blind policies, we propose VB-Com, a composite framework that enables humanoid robots to determine when to rely on the vision policy and when to switch to the blind policy under perceptual deficiency. We demonstrate that VB-Com effectively enables humanoid robots to traverse challenging terrains and obstacles despite perception deficiencies caused by dynamic terrains or perceptual noise.
Learning Humanoid Standing-up Control across Diverse Postures
Feb 12, 2025Standing-up control is crucial for humanoid robots, with the potential for integration into current locomotion and loco-manipulation systems, such as fall recovery. Existing approaches are either limited to simulations that overlook hardware constraints or rely on predefined ground-specific motion trajectories, failing to enable standing up across postures in real-world scenes. To bridge this gap, we present HoST (Humanoid Standing-up Control), a reinforcement learning framework that learns standing-up control from scratch, enabling robust sim-to-real transfer across diverse postures. HoST effectively learns posture-adaptive motions by leveraging a multi-critic architecture and curriculum-based training on diverse simulated terrains. To ensure successful real-world deployment, we constrain the motion with smoothness regularization and implicit motion speed bound to alleviate oscillatory and violent motions on physical hardware, respectively. After simulation-based training, the learned control policies are directly deployed on the Unitree G1 humanoid robot. Our experimental results demonstrate that the controllers achieve smooth, stable, and robust standing-up motions across a wide range of laboratory and outdoor environments. Videos are available at https://taohuang13.github.io/humanoid-standingup.github.io/.
Learning Humanoid Locomotion with Perceptive Internal Model
Nov 21, 2024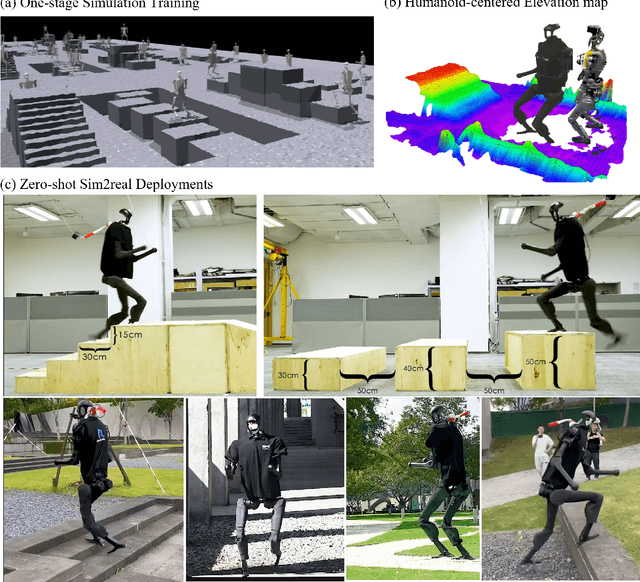
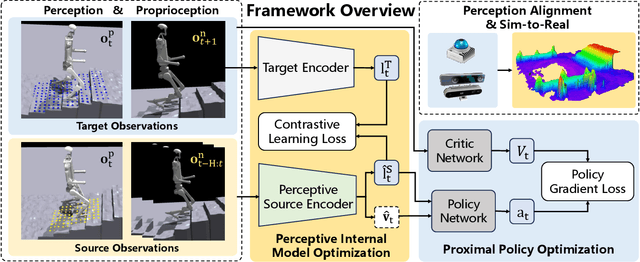
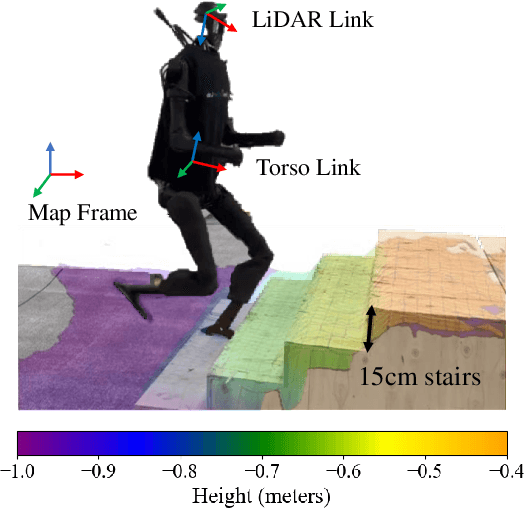
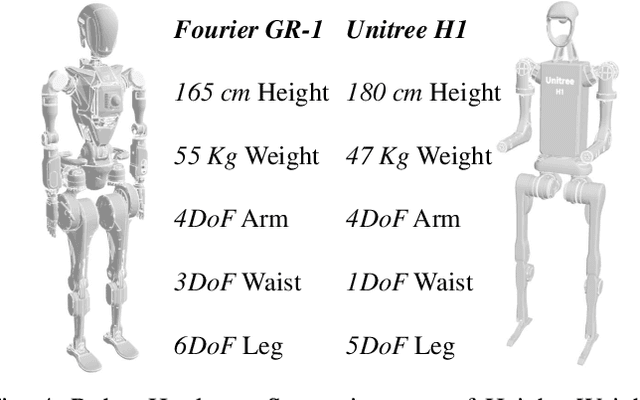
In contrast to quadruped robots that can navigate diverse terrains using a "blind" policy, humanoid robots require accurate perception for stable locomotion due to their high degrees of freedom and inherently unstable morphology. However, incorporating perceptual signals often introduces additional disturbances to the system, potentially reducing its robustness, generalizability, and efficiency. This paper presents the Perceptive Internal Model (PIM), which relies on onboard, continuously updated elevation maps centered around the robot to perceive its surroundings. We train the policy using ground-truth obstacle heights surrounding the robot in simulation, optimizing it based on the Hybrid Internal Model (HIM), and perform inference with heights sampled from the constructed elevation map. Unlike previous methods that directly encode depth maps or raw point clouds, our approach allows the robot to perceive the terrain beneath its feet clearly and is less affected by camera movement or noise. Furthermore, since depth map rendering is not required in simulation, our method introduces minimal additional computational costs and can train the policy in 3 hours on an RTX 4090 GPU. We verify the effectiveness of our method across various humanoid robots, various indoor and outdoor terrains, stairs, and various sensor configurations. Our method can enable a humanoid robot to continuously climb stairs and has the potential to serve as a foundational algorithm for the development of future humanoid control methods.
TOP-Nav: Legged Navigation Integrating Terrain, Obstacle and Proprioception Estimation
Apr 24, 2024



Legged navigation is typically examined within open-world, off-road, and challenging environments. In these scenarios, estimating external disturbances requires a complex synthesis of multi-modal information. This underlines a major limitation in existing works that primarily focus on avoiding obstacles. In this work, we propose TOP-Nav, a novel legged navigation framework that integrates a comprehensive path planner with Terrain awareness, Obstacle avoidance and close-loop Proprioception. TOP-Nav underscores the synergies between vision and proprioception in both path and motion planning. Within the path planner, we present and integrate a terrain estimator that enables the robot to select waypoints on terrains with higher traversability while effectively avoiding obstacles. In the motion planning level, we not only implement a locomotion controller to track the navigation commands, but also construct a proprioception advisor to provide motion evaluations for the path planner. Based on the close-loop motion feedback, we make online corrections for the vision-based terrain and obstacle estimations. Consequently, TOP-Nav achieves open-world navigation that the robot can handle terrains or disturbances beyond the distribution of prior knowledge and overcomes constraints imposed by visual conditions. Building upon extensive experiments conducted in both simulation and real-world environments, TOP-Nav demonstrates superior performance in open-world navigation compared to existing methods.
FishMOT: A Simple and Effective Method for Fish Tracking Based on IoU Matching
Sep 22, 2023



Fish tracking plays a vital role in understanding fish behavior and ecology. However, existing tracking methods face challenges in accuracy and robustness dues to morphological change of fish, occlusion and complex environment. This paper proposes FishMOT(Multiple Object Tracking for Fish), a novel fish tracking approach combining object detection and IoU matching, including basic module, interaction module and refind module. Wherein, a basic module performs target association based on IoU of detection boxes between successive frames to deal with morphological change of fish; an interaction module combines IoU of detection boxes and IoU of fish entity to handle occlusions; a refind module use spatio-temporal information uses spatio-temporal information to overcome the tracking failure resulting from the missed detection by the detector under complex environment. FishMOT reduces the computational complexity and memory consumption since it does not require complex feature extraction or identity assignment per fish, and does not need Kalman filter to predict the detection boxes of successive frame. Experimental results demonstrate FishMOT outperforms state-of-the-art multi-object trackers and specialized fish tracking tools in terms of MOTA, accuracy, computation time, memory consumption, etc.. Furthermore, the method exhibits excellent robustness and generalizability for varying environments and fish numbers. The simplified workflow and strong performance make FishMOT as a highly effective fish tracking approach. The source codes and pre-trained models are available at: https://github.com/gakkistar/FishMOT