 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTOP-Nav: Legged Navigation Integrating Terrain, Obstacle and Proprioception Estimation
Apr 24, 2024



Legged navigation is typically examined within open-world, off-road, and challenging environments. In these scenarios, estimating external disturbances requires a complex synthesis of multi-modal information. This underlines a major limitation in existing works that primarily focus on avoiding obstacles. In this work, we propose TOP-Nav, a novel legged navigation framework that integrates a comprehensive path planner with Terrain awareness, Obstacle avoidance and close-loop Proprioception. TOP-Nav underscores the synergies between vision and proprioception in both path and motion planning. Within the path planner, we present and integrate a terrain estimator that enables the robot to select waypoints on terrains with higher traversability while effectively avoiding obstacles. In the motion planning level, we not only implement a locomotion controller to track the navigation commands, but also construct a proprioception advisor to provide motion evaluations for the path planner. Based on the close-loop motion feedback, we make online corrections for the vision-based terrain and obstacle estimations. Consequently, TOP-Nav achieves open-world navigation that the robot can handle terrains or disturbances beyond the distribution of prior knowledge and overcomes constraints imposed by visual conditions. Building upon extensive experiments conducted in both simulation and real-world environments, TOP-Nav demonstrates superior performance in open-world navigation compared to existing methods.
RCooper: A Real-world Large-scale Dataset for Roadside Cooperative Perception
Mar 31, 2024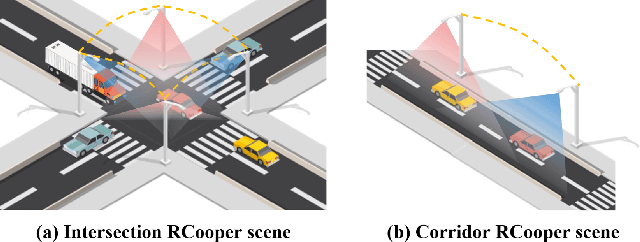
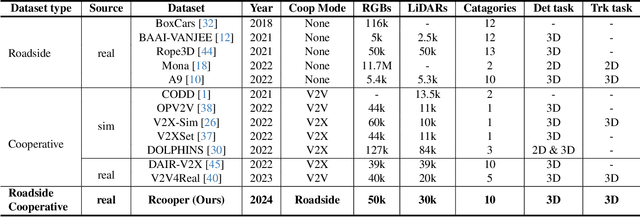
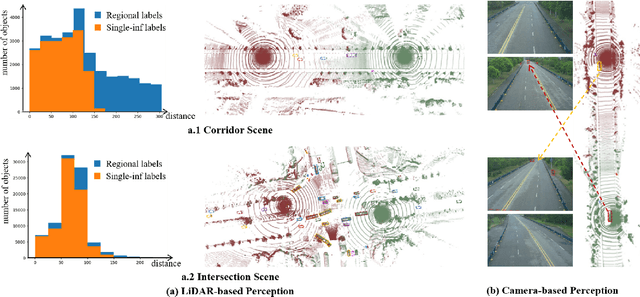
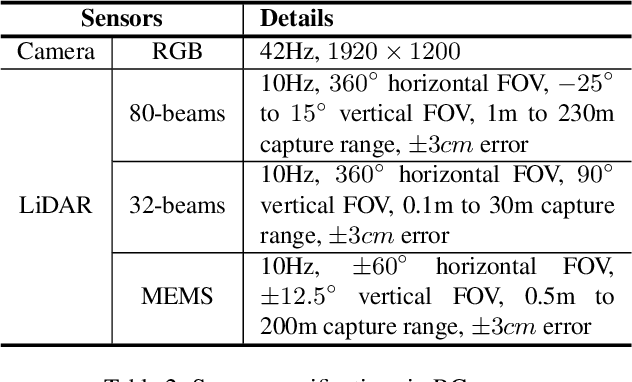
The value of roadside perception, which could extend the boundaries of autonomous driving and traffic management, has gradually become more prominent and acknowledged in recent years. However, existing roadside perception approaches only focus on the single-infrastructure sensor system, which cannot realize a comprehensive understanding of a traffic area because of the limited sensing range and blind spots. Orienting high-quality roadside perception, we need Roadside Cooperative Perception (RCooper) to achieve practical area-coverage roadside perception for restricted traffic areas. Rcooper has its own domain-specific challenges, but further exploration is hindered due to the lack of datasets. We hence release the first real-world, large-scale RCooper dataset to bloom the research on practical roadside cooperative perception, including detection and tracking. The manually annotated dataset comprises 50k images and 30k point clouds, including two representative traffic scenes (i.e., intersection and corridor). The constructed benchmarks prove the effectiveness of roadside cooperation perception and demonstrate the direction of further research. Codes and dataset can be accessed at: https://github.com/AIR-THU/DAIR-RCooper.