 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLarge-scale nonlinear optical computing with incoherent light via linear diffractive systems
Mar 31, 2026Nonlinear computation is essential for various information processing tasks. Optical implementations are attractive because passive light propagation can manipulate high-dimensional signals with extreme throughput and parallelism; yet realizing nonlinear mappings in optical hardware remains challenging due to the weak nonlinearity of optical materials and the large intensities required to induce nonlinear interactions. This challenge is further amplified in many systems that operate with incoherent illumination, motivating a coherence-aware framework for scalable optical nonlinear processing. Here, we show that linear optical systems, in particular, optimized diffractive processors comprising passive surfaces, can perform large-scale nonlinear function approximation under spatially incoherent or partially coherent illumination, when preceded by intensity-only input encoding. We quantify how the accuracy of the nonlinear function approximation varies with the degree of parallelism, the number of diffractive layers, and the number of trainable diffractive features. Numerical results demonstrate snapshot computation of up to one million distinct nonlinear functions in a single forward pass through a diffractive processor, with the function outputs spatially multiplexed and read out using densely packed detectors at the output. We further provide a proof-of-concept experimental demonstration under incoherent illumination from a liquid crystal display (LCD), enabled by a model-free in situ learning strategy that jointly optimizes the diffractive profile and detector readout geometry in the presence of hardware imperfections and misalignments. Our findings establish diffractive processors as a massively parallel universal function approximator for both spatially incoherent and partially coherent illumination.
Compressive single-pixel imaging via a wavelength-multiplexed spatially incoherent diffractive optical processor
Mar 23, 2026Despite offering high sensitivity, a high signal-to-noise ratio, and a broad spectral range, single-pixel imaging (SPI) is limited by low measurement efficiency and long data-acquisition times. To address this, we propose a wavelength-multiplexed, spatially incoherent diffractive optical processor combined with a compact/shallow digital artificial neural network (ANN) to implement compressive SPI. Specifically, we model the bucket detection process in conventional SPI as a linear intensity transformation with spatially and spectrally varying point-spread functions. This transformation matrix is treated as a learnable parameter and jointly optimized with a shallow digital ANN composed of 2 hidden nonlinear layers. The wavelength-multiplexed diffractive processor is then configured via data-free optimization to approximate this pre-trained transformation matrix; after this optimization, the diffractive processor remains static/fixed. Upon multi-wavelength illumination and diffractive modulation, the target spatial information of the input object is spectrally encoded. A single-pixel detector captures the output spectral power at each illumination band, which is then rapidly decoded by the jointly trained digital ANN to reconstruct the input image. In addition to our numerical analyses demonstrating the feasibility of this approach, we experimentally validated its proof-of-concept using an array of light-emitting diodes (LEDs). Overall, this work demonstrates a computational imaging framework for compressive SPI that can be useful in applications such as biomedical imaging, autonomous devices, and remote sensing.
Unidirectional imaging with partially coherent light
Aug 10, 2024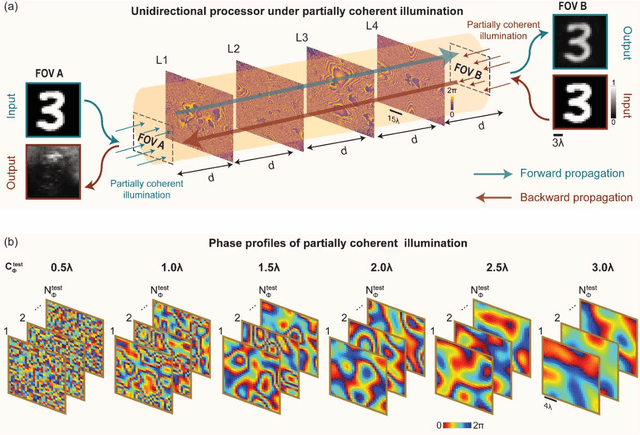
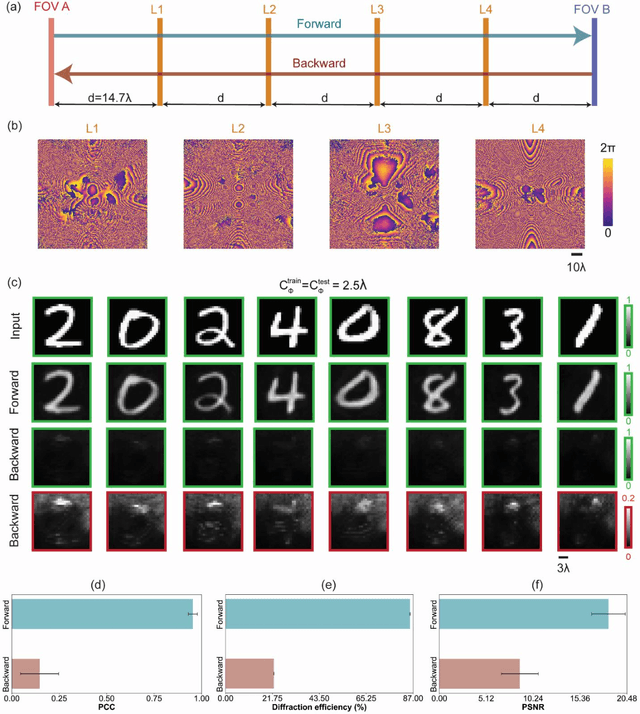
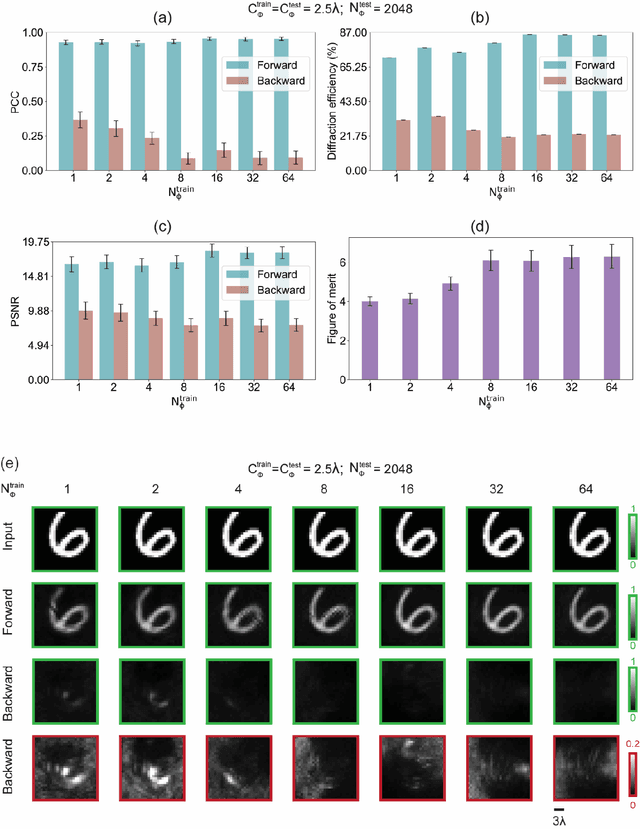

Unidirectional imagers form images of input objects only in one direction, e.g., from field-of-view (FOV) A to FOV B, while blocking the image formation in the reverse direction, from FOV B to FOV A. Here, we report unidirectional imaging under spatially partially coherent light and demonstrate high-quality imaging only in the forward direction (A->B) with high power efficiency while distorting the image formation in the backward direction (B->A) along with low power efficiency. Our reciprocal design features a set of spatially engineered linear diffractive layers that are statistically optimized for partially coherent illumination with a given phase correlation length. Our analyses reveal that when illuminated by a partially coherent beam with a correlation length of ~1.5 w or larger, where w is the wavelength of light, diffractive unidirectional imagers achieve robust performance, exhibiting asymmetric imaging performance between the forward and backward directions - as desired. A partially coherent unidirectional imager designed with a smaller correlation length of less than 1.5 w still supports unidirectional image transmission, but with a reduced figure of merit. These partially coherent diffractive unidirectional imagers are compact (axially spanning less than 75 w), polarization-independent, and compatible with various types of illumination sources, making them well-suited for applications in asymmetric visual information processing and communication.
RCooper: A Real-world Large-scale Dataset for Roadside Cooperative Perception
Mar 31, 2024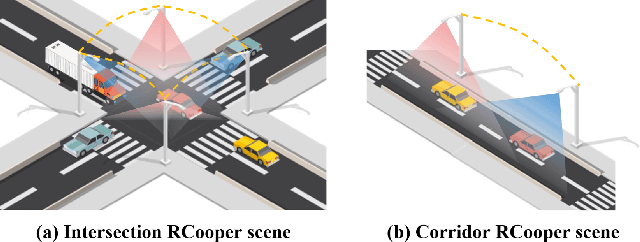
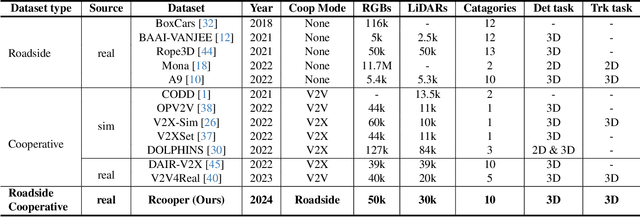
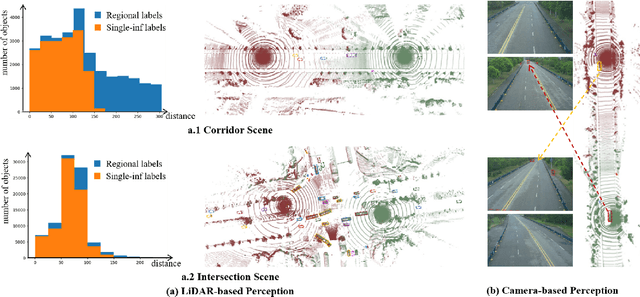
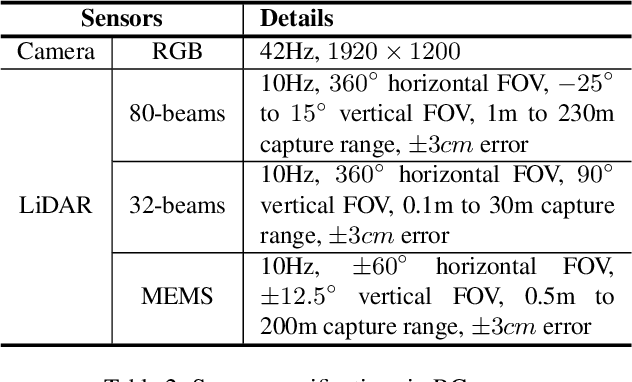
The value of roadside perception, which could extend the boundaries of autonomous driving and traffic management, has gradually become more prominent and acknowledged in recent years. However, existing roadside perception approaches only focus on the single-infrastructure sensor system, which cannot realize a comprehensive understanding of a traffic area because of the limited sensing range and blind spots. Orienting high-quality roadside perception, we need Roadside Cooperative Perception (RCooper) to achieve practical area-coverage roadside perception for restricted traffic areas. Rcooper has its own domain-specific challenges, but further exploration is hindered due to the lack of datasets. We hence release the first real-world, large-scale RCooper dataset to bloom the research on practical roadside cooperative perception, including detection and tracking. The manually annotated dataset comprises 50k images and 30k point clouds, including two representative traffic scenes (i.e., intersection and corridor). The constructed benchmarks prove the effectiveness of roadside cooperation perception and demonstrate the direction of further research. Codes and dataset can be accessed at: https://github.com/AIR-THU/DAIR-RCooper.
Information hiding cameras: optical concealment of object information into ordinary images
Jan 15, 2024Data protection methods like cryptography, despite being effective, inadvertently signal the presence of secret communication, thereby drawing undue attention. Here, we introduce an optical information hiding camera integrated with an electronic decoder, optimized jointly through deep learning. This information hiding-decoding system employs a diffractive optical processor as its front-end, which transforms and hides input images in the form of ordinary-looking patterns that deceive/mislead human observers. This information hiding transformation is valid for infinitely many combinations of secret messages, all of which are transformed into ordinary-looking output patterns, achieved all-optically through passive light-matter interactions within the optical processor. By processing these ordinary-looking output images, a jointly-trained electronic decoder neural network accurately reconstructs the original information hidden within the deceptive output pattern. We numerically demonstrated our approach by designing an information hiding diffractive camera along with a jointly-optimized convolutional decoder neural network. The efficacy of this system was demonstrated under various lighting conditions and noise levels, showing its robustness. We further extended this information hiding camera to multi-spectral operation, allowing the concealment and decoding of multiple images at different wavelengths, all performed simultaneously in a single feed-forward operation. The feasibility of our framework was also demonstrated experimentally using THz radiation. This optical encoder-electronic decoder-based co-design provides a novel information hiding camera interface that is both high-speed and energy-efficient, offering an intriguing solution for visual information security.