 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFIRE: A Comprehensive Benchmark for Financial Intelligence and Reasoning Evaluation
Feb 25, 2026We introduce FIRE, a comprehensive benchmark designed to evaluate both the theoretical financial knowledge of LLMs and their ability to handle practical business scenarios. For theoretical assessment, we curate a diverse set of examination questions drawn from widely recognized financial qualification exams, enabling evaluation of LLMs deep understanding and application of financial knowledge. In addition, to assess the practical value of LLMs in real-world financial tasks, we propose a systematic evaluation matrix that categorizes complex financial domains and ensures coverage of essential subdomains and business activities. Based on this evaluation matrix, we collect 3,000 financial scenario questions, consisting of closed-form decision questions with reference answers and open-ended questions evaluated by predefined rubrics. We conduct comprehensive evaluations of state-of-the-art LLMs on the FIRE benchmark, including XuanYuan 4.0, our latest financial-domain model, as a strong in-domain baseline. These results enable a systematic analysis of the capability boundaries of current LLMs in financial applications. We publicly release the benchmark questions and evaluation code to facilitate future research.
Sampling-Pattern-Agnostic MRI Reconstruction through Adaptive Consistency Enforcement with Diffusion Model
Sep 22, 2024Magnetic Resonance Imaging (MRI) is a powerful, non-invasive diagnostic tool; however, its clinical applicability is constrained by prolonged acquisition times. Whilst present deep learning-based approaches have demonstrated potential in expediting MRI processes, these methods usually rely on known sampling patterns and exhibit limited generalisability to novel patterns. In the paper, we propose a sampling-pattern-agnostic MRI reconstruction method via a diffusion model through adaptive consistency enforcement. Our approach effectively reconstructs high-fidelity images with varied under-sampled acquisitions, generalising across contrasts and acceleration factors regardless of sampling trajectories. We train and validate across all contrasts in the MICCAI 2024 Cardiac MRI Reconstruction Challenge (CMRxRecon) dataset for the ``Random sampling CMR reconstruction'' task. Evaluation results indicate that our proposed method significantly outperforms baseline methods.
The state-of-the-art in Cardiac MRI Reconstruction: Results of the CMRxRecon Challenge in MICCAI 2023
Apr 01, 2024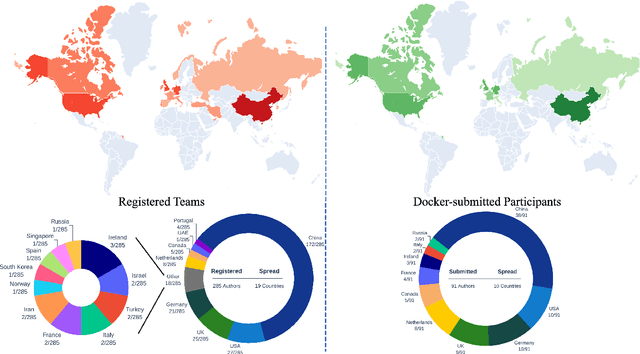
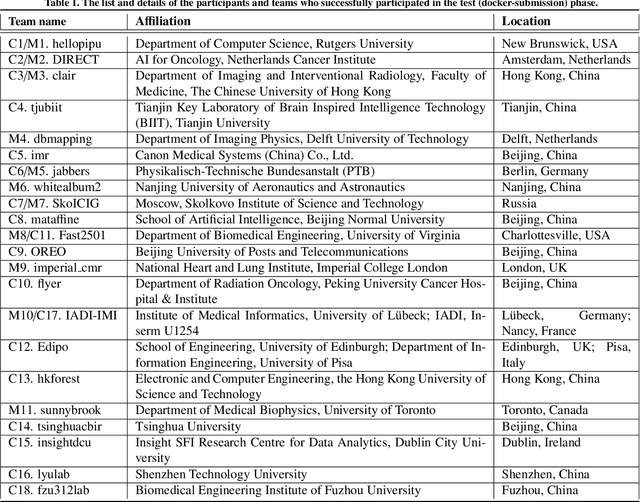
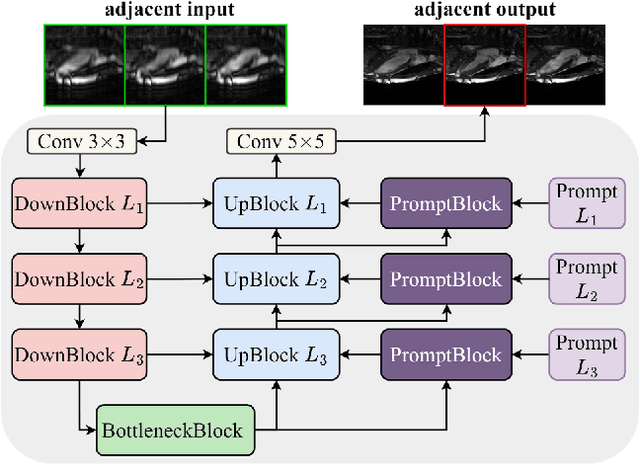
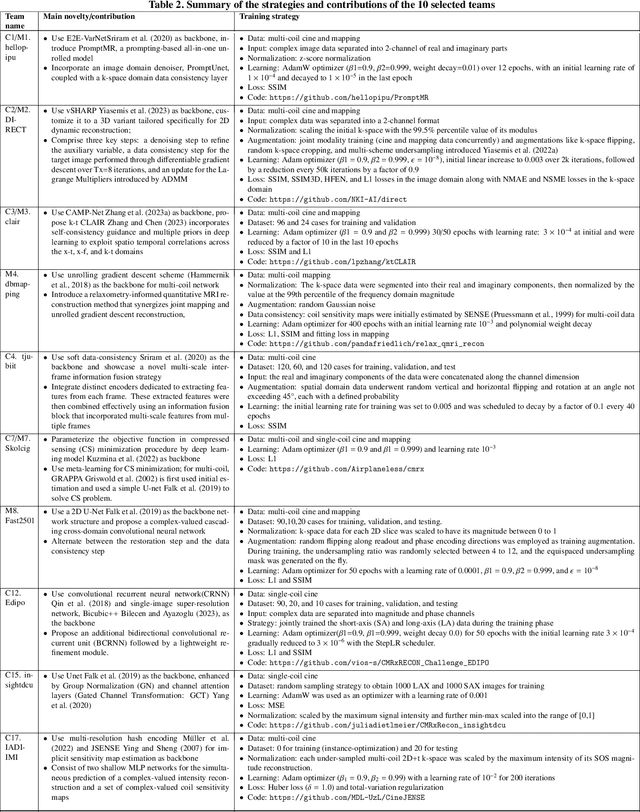
Cardiac MRI, crucial for evaluating heart structure and function, faces limitations like slow imaging and motion artifacts. Undersampling reconstruction, especially data-driven algorithms, has emerged as a promising solution to accelerate scans and enhance imaging performance using highly under-sampled data. Nevertheless, the scarcity of publicly available cardiac k-space datasets and evaluation platform hinder the development of data-driven reconstruction algorithms. To address this issue, we organized the Cardiac MRI Reconstruction Challenge (CMRxRecon) in 2023, in collaboration with the 26th International Conference on MICCAI. CMRxRecon presented an extensive k-space dataset comprising cine and mapping raw data, accompanied by detailed annotations of cardiac anatomical structures. With overwhelming participation, the challenge attracted more than 285 teams and over 600 participants. Among them, 22 teams successfully submitted Docker containers for the testing phase, with 7 teams submitted for both cine and mapping tasks. All teams use deep learning based approaches, indicating that deep learning has predominately become a promising solution for the problem. The first-place winner of both tasks utilizes the E2E-VarNet architecture as backbones. In contrast, U-Net is still the most popular backbone for both multi-coil and single-coil reconstructions. This paper provides a comprehensive overview of the challenge design, presents a summary of the submitted results, reviews the employed methods, and offers an in-depth discussion that aims to inspire future advancements in cardiac MRI reconstruction models. The summary emphasizes the effective strategies observed in Cardiac MRI reconstruction, including backbone architecture, loss function, pre-processing techniques, physical modeling, and model complexity, thereby providing valuable insights for further developments in this field.
RCooper: A Real-world Large-scale Dataset for Roadside Cooperative Perception
Mar 31, 2024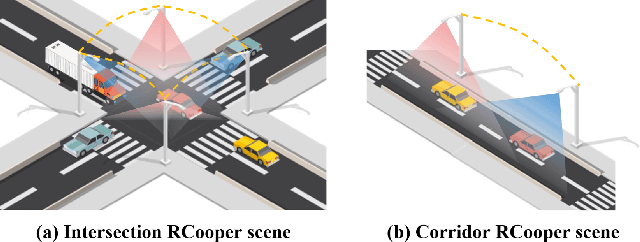
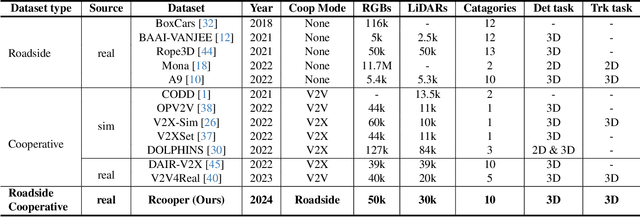
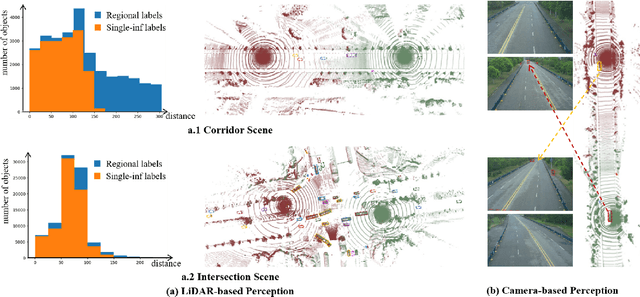
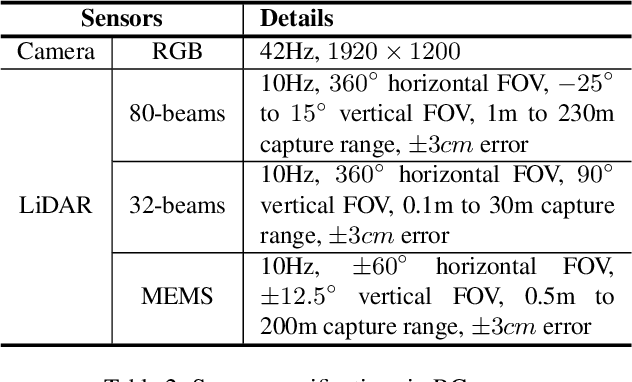
The value of roadside perception, which could extend the boundaries of autonomous driving and traffic management, has gradually become more prominent and acknowledged in recent years. However, existing roadside perception approaches only focus on the single-infrastructure sensor system, which cannot realize a comprehensive understanding of a traffic area because of the limited sensing range and blind spots. Orienting high-quality roadside perception, we need Roadside Cooperative Perception (RCooper) to achieve practical area-coverage roadside perception for restricted traffic areas. Rcooper has its own domain-specific challenges, but further exploration is hindered due to the lack of datasets. We hence release the first real-world, large-scale RCooper dataset to bloom the research on practical roadside cooperative perception, including detection and tracking. The manually annotated dataset comprises 50k images and 30k point clouds, including two representative traffic scenes (i.e., intersection and corridor). The constructed benchmarks prove the effectiveness of roadside cooperation perception and demonstrate the direction of further research. Codes and dataset can be accessed at: https://github.com/AIR-THU/DAIR-RCooper.
YOLOPv2: Better, Faster, Stronger for Panoptic Driving Perception
Aug 24, 2022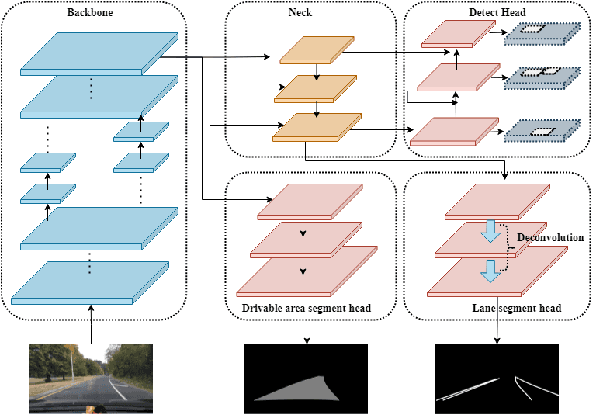
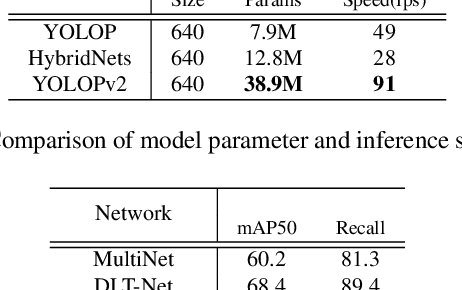
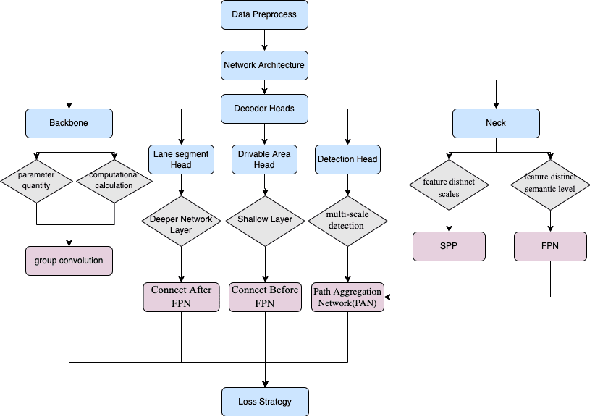
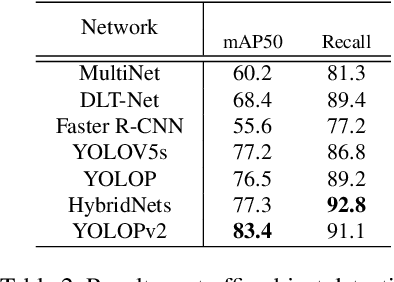
Over the last decade, multi-tasking learning approaches have achieved promising results in solving panoptic driving perception problems, providing both high-precision and high-efficiency performance. It has become a popular paradigm when designing networks for real-time practical autonomous driving system, where computation resources are limited. This paper proposed an effective and efficient multi-task learning network to simultaneously perform the task of traffic object detection, drivable road area segmentation and lane detection. Our model achieved the new state-of-the-art (SOTA) performance in terms of accuracy and speed on the challenging BDD100K dataset. Especially, the inference time is reduced by half compared to the previous SOTA model. Code will be released in the near future.