 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Humanoid Locomotion with Perceptive Internal Model
Paper and Code
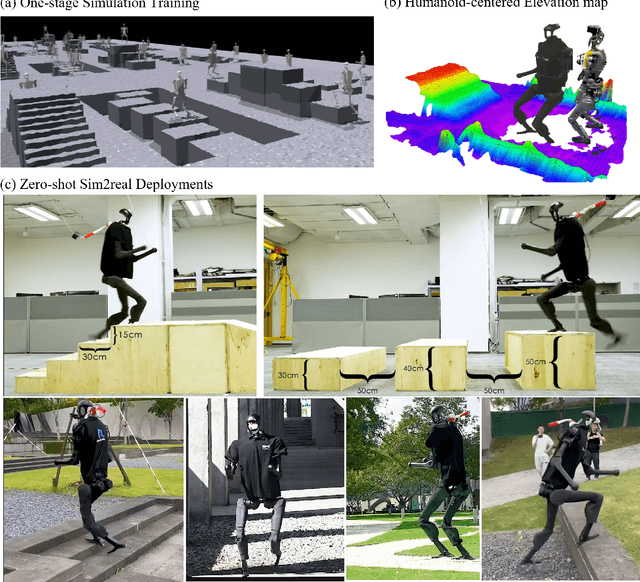
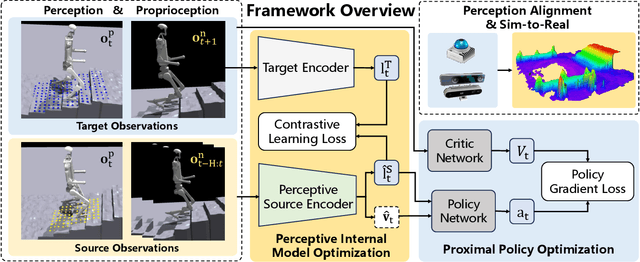
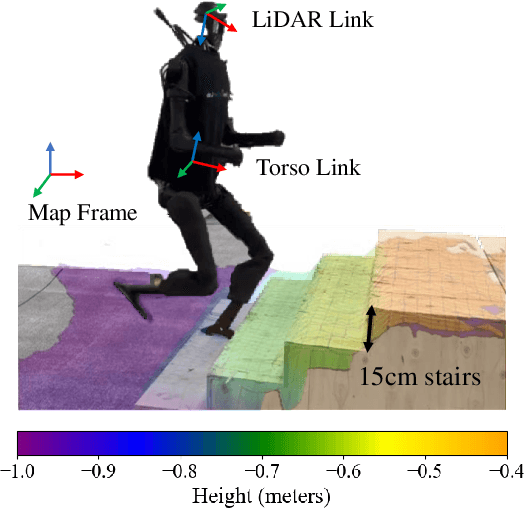
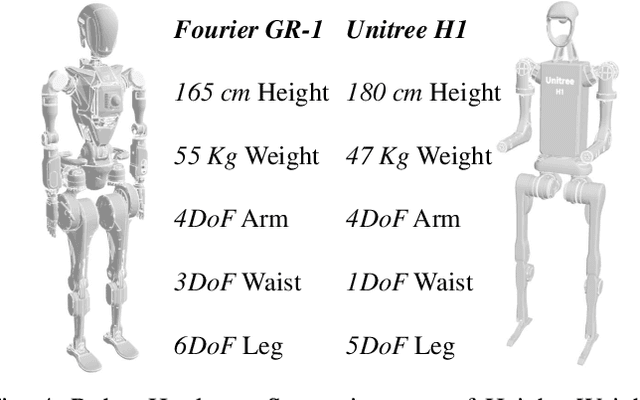
In contrast to quadruped robots that can navigate diverse terrains using a "blind" policy, humanoid robots require accurate perception for stable locomotion due to their high degrees of freedom and inherently unstable morphology. However, incorporating perceptual signals often introduces additional disturbances to the system, potentially reducing its robustness, generalizability, and efficiency. This paper presents the Perceptive Internal Model (PIM), which relies on onboard, continuously updated elevation maps centered around the robot to perceive its surroundings. We train the policy using ground-truth obstacle heights surrounding the robot in simulation, optimizing it based on the Hybrid Internal Model (HIM), and perform inference with heights sampled from the constructed elevation map. Unlike previous methods that directly encode depth maps or raw point clouds, our approach allows the robot to perceive the terrain beneath its feet clearly and is less affected by camera movement or noise. Furthermore, since depth map rendering is not required in simulation, our method introduces minimal additional computational costs and can train the policy in 3 hours on an RTX 4090 GPU. We verify the effectiveness of our method across various humanoid robots, various indoor and outdoor terrains, stairs, and various sensor configurations. Our method can enable a humanoid robot to continuously climb stairs and has the potential to serve as a foundational algorithm for the development of future humanoid control methods.