 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Humanoid Locomotion with Perceptive Internal Model
Nov 21, 2024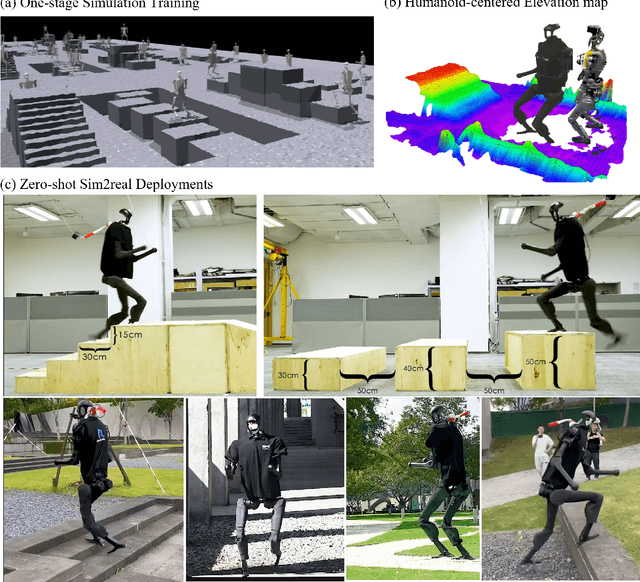
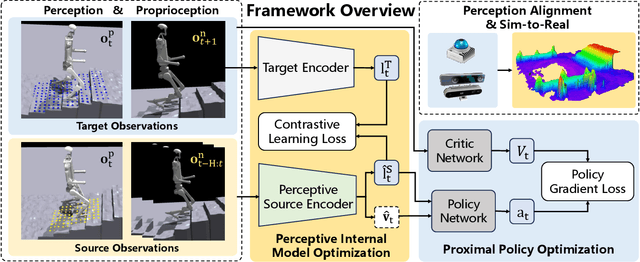
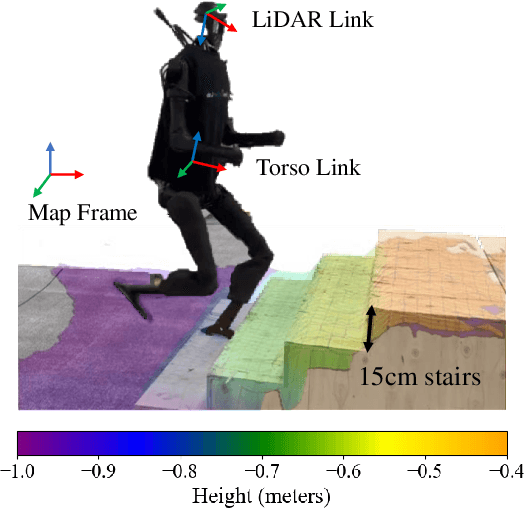
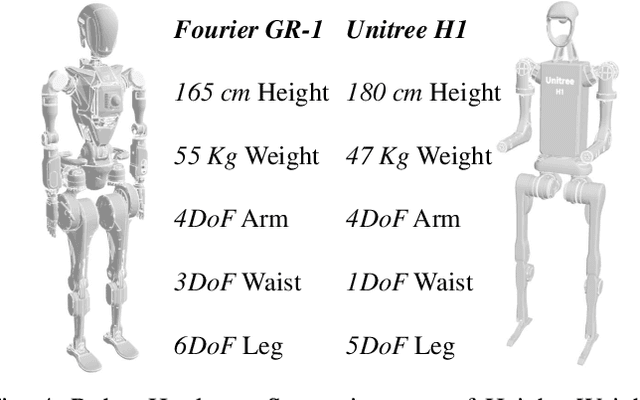
In contrast to quadruped robots that can navigate diverse terrains using a "blind" policy, humanoid robots require accurate perception for stable locomotion due to their high degrees of freedom and inherently unstable morphology. However, incorporating perceptual signals often introduces additional disturbances to the system, potentially reducing its robustness, generalizability, and efficiency. This paper presents the Perceptive Internal Model (PIM), which relies on onboard, continuously updated elevation maps centered around the robot to perceive its surroundings. We train the policy using ground-truth obstacle heights surrounding the robot in simulation, optimizing it based on the Hybrid Internal Model (HIM), and perform inference with heights sampled from the constructed elevation map. Unlike previous methods that directly encode depth maps or raw point clouds, our approach allows the robot to perceive the terrain beneath its feet clearly and is less affected by camera movement or noise. Furthermore, since depth map rendering is not required in simulation, our method introduces minimal additional computational costs and can train the policy in 3 hours on an RTX 4090 GPU. We verify the effectiveness of our method across various humanoid robots, various indoor and outdoor terrains, stairs, and various sensor configurations. Our method can enable a humanoid robot to continuously climb stairs and has the potential to serve as a foundational algorithm for the development of future humanoid control methods.
Decentralized Multi-Agent Trajectory Planning in Dynamic Environments with Spatiotemporal Occupancy Grid Maps
Apr 24, 2024This paper proposes a decentralized trajectory planning framework for the collision avoidance problem of multiple micro aerial vehicles (MAVs) in environments with static and dynamic obstacles. The framework utilizes spatiotemporal occupancy grid maps (SOGM), which forecast the occupancy status of neighboring space in the near future, as the environment representation. Based on this representation, we extend the kinodynamic A* and the corridor-constrained trajectory optimization algorithms to efficiently tackle static and dynamic obstacles with arbitrary shapes. Collision avoidance between communicating robots is integrated by sharing planned trajectories and projecting them onto the SOGM. The simulation results show that our method achieves competitive performance against state-of-the-art methods in dynamic environments with different numbers and shapes of obstacles. Finally, the proposed method is validated in real experiments.
Evaluating Dynamic Environment Difficulty for Obstacle Avoidance Benchmarking
Apr 23, 2024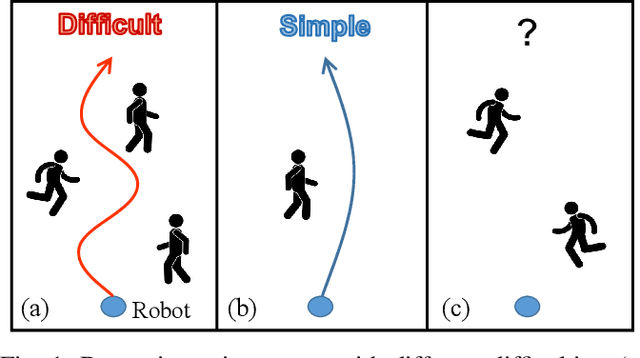
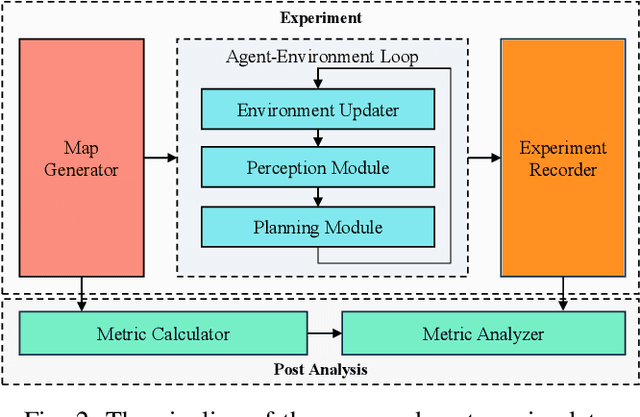
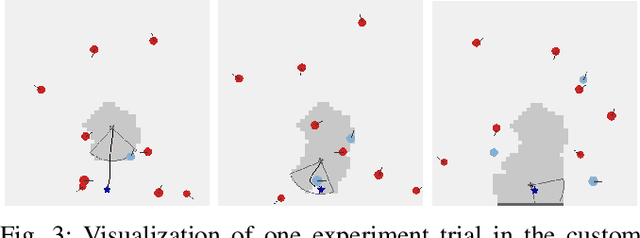
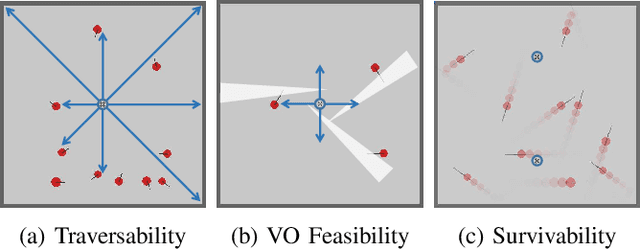
Dynamic obstacle avoidance is a popular research topic for autonomous systems, such as micro aerial vehicles and service robots. Accurately evaluating the performance of dynamic obstacle avoidance methods necessitates the establishment of a metric to quantify the environment's difficulty, a crucial aspect that remains unexplored. In this paper, we propose four metrics to measure the difficulty of dynamic environments. These metrics aim to comprehensively capture the influence of obstacles' number, size, velocity, and other factors on the difficulty. We compare the proposed metrics with existing static environment difficulty metrics and validate them through over 1.5 million trials in a customized simulator. This simulator excludes the effects of perception and control errors and supports different motion and gaze planners for obstacle avoidance. The results indicate that the survivability metric outperforms and establishes a monotonic relationship between the success rate, with a Spearman's Rank Correlation Coefficient (SRCC) of over 0.9. Specifically, for every planner, lower survivability leads to a higher success rate. This metric not only facilitates fair and comprehensive benchmarking but also provides insights for refining collision avoidance methods, thereby furthering the evolution of autonomous systems in dynamic environments.