 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOVAL: Open-Vocabulary Augmented Memory Model for Lifelong Object Goal Navigation
Apr 14, 2026Object Goal Navigation (ObjectNav) refers to an agent navigating to an object in an unseen environment, which is an ability often required in the accomplishment of complex tasks. While existing methods demonstrate proficiency in isolated single object navigation, their limitations emerge in the restricted applicability of lifelong memory representations, which ultimately hinders effective navigation toward continual targets over extended periods. To address this problem, we propose OVAL, a novel lifelong open-vocabulary memory framework, which enables efficient and precise execution of long-term navigation in semantically open tasks. Within this framework, we introduce memory descriptors to facilitate structured management of the memory model. Additionally, we propose a novel probability-based exploration strategy, utilizing a multi-value frontier scoring to enhance lifelong exploration efficiency. Extensive experiments demonstrate the efficiency and robustness of the proposed system.
PhaForce: Phase-Scheduled Visual-Force Policy Learning with Slow Planning and Fast Correction for Contact-Rich Manipulation
Mar 09, 2026Contact-rich manipulation requires not only vision-dominant task semantics but also closed-loop reactions to force/torque (F/T) transients. Yet, generative visuomotor policies are typically constrained to low-frequency updates due to inference latency and action chunking, underutilizing F/T for control-rate feedback. Furthermore, existing force-aware methods often inject force continuously and indiscriminately, lacking an explicit mechanism to schedule when / how much / where to apply force across different task phases. We propose PhaForce, a phase-scheduled visual--force policy that coordinates low-rate chunk-level planning and high-rate residual correction via a unified contact/phase schedule. PhaForce comprises (i) a contact-aware phase predictor (CAP) that estimates contact probability and phase belief, (ii) a Slow diffusion planner that performs dual-gated visual--force fusion with orthogonal residual injection to preserve vision semantics while conditioning on force, and (iii) a Fast corrector that applies control-rate phase-routed residuals in interpretable corrective subspaces for within-chunk micro-adjustments. Across multiple real-robot contact-rich tasks, PhaForce achieves an average success rate of 86% (+40 pp over baselines), while also substantially improving contact quality by regulating interaction forces and exhibiting robust adaptability to OOD geometric shifts.
Quadruped robot traversing 3D complex environments with limited perception
Apr 30, 2024Traversing 3-D complex environments has always been a significant challenge for legged locomotion. Existing methods typically rely on external sensors such as vision and lidar to preemptively react to obstacles by acquiring environmental information. However, in scenarios like nighttime or dense forests, external sensors often fail to function properly, necessitating robots to rely on proprioceptive sensors to perceive diverse obstacles in the environment and respond promptly. This task is undeniably challenging. Our research finds that methods based on collision detection can enhance a robot's perception of environmental obstacles. In this work, we propose an end-to-end learning-based quadruped robot motion controller that relies solely on proprioceptive sensing. This controller can accurately detect, localize, and agilely respond to collisions in unknown and complex 3D environments, thereby improving the robot's traversability in complex environments. We demonstrate in both simulation and real-world experiments that our method enables quadruped robots to successfully traverse challenging obstacles in various complex environments.
RoboDuet: A Framework Affording Mobile-Manipulation and Cross-Embodiment
Mar 27, 2024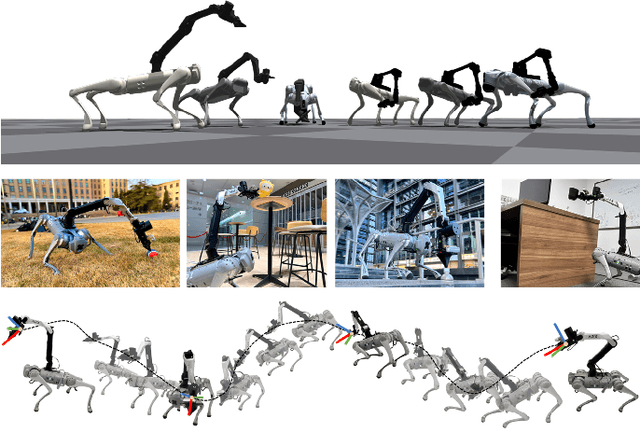
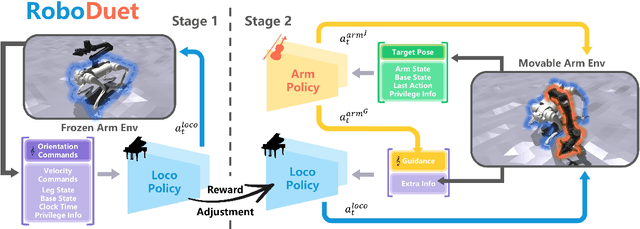
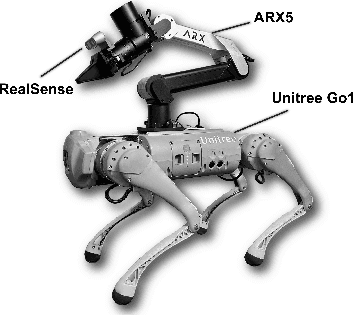
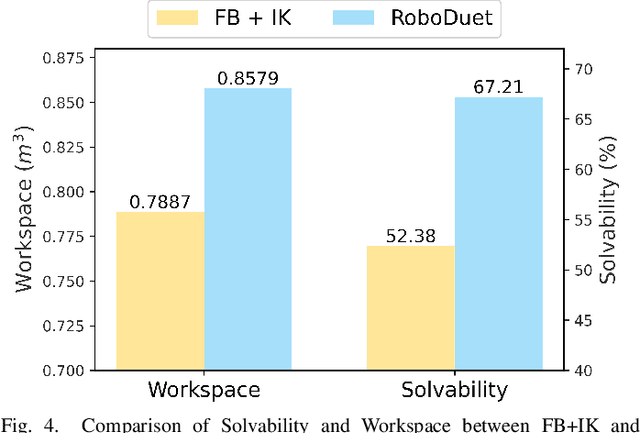
Combining the mobility of legged robots with the manipulation skills of arms has the potential to significantly expand the operational range and enhance the capabilities of robotic systems in performing various mobile manipulation tasks. Existing approaches are confined to imprecise six degrees of freedom (DoF) manipulation and possess a limited arm workspace. In this paper, we propose a novel framework, RoboDuet, which employs two collaborative policies to realize locomotion and manipulation simultaneously, achieving whole-body control through interactions between each other. Surprisingly, going beyond the large-range pose tracking, we find that the two-policy framework may enable cross-embodiment deployment such as using different quadrupedal robots or other arms. Our experiments demonstrate that the policies trained through RoboDuet can accomplish stable gaits, agile 6D end-effector pose tracking, and zero-shot exchange of legged robots, and can be deployed in the real world to perform various mobile manipulation tasks. Our project page with demo videos is at https://locomanip-duet.github.io .