 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRoboDuet: A Framework Affording Mobile-Manipulation and Cross-Embodiment
Paper and Code
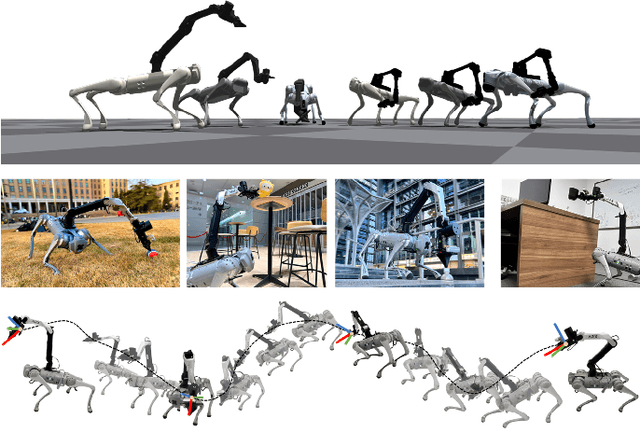
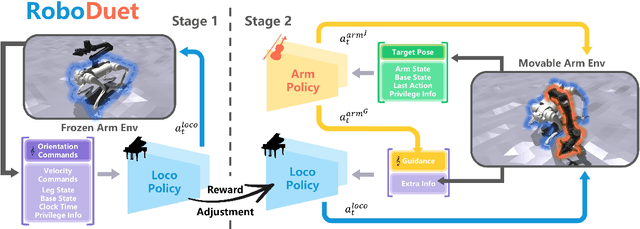
Combining the mobility of legged robots with the manipulation skills of arms has the potential to significantly expand the operational range and enhance the capabilities of robotic systems in performing various mobile manipulation tasks. Existing approaches are confined to imprecise six degrees of freedom (DoF) manipulation and possess a limited arm workspace. In this paper, we propose a novel framework, RoboDuet, which employs two collaborative policies to realize locomotion and manipulation simultaneously, achieving whole-body control through interactions between each other. Surprisingly, going beyond the large-range pose tracking, we find that the two-policy framework may enable cross-embodiment deployment such as using different quadrupedal robots or other arms. Our experiments demonstrate that the policies trained through RoboDuet can accomplish stable gaits, agile 6D end-effector pose tracking, and zero-shot exchange of legged robots, and can be deployed in the real world to perform various mobile manipulation tasks. Our project page with demo videos is at https://locomanip-duet.github.io .