 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNaVILA: Legged Robot Vision-Language-Action Model for Navigation
Dec 05, 2024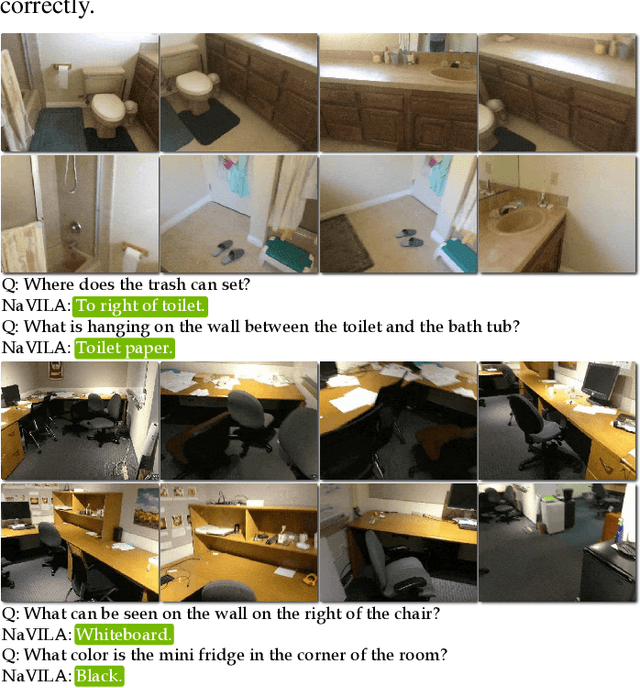

This paper proposes to solve the problem of Vision-and-Language Navigation with legged robots, which not only provides a flexible way for humans to command but also allows the robot to navigate through more challenging and cluttered scenes. However, it is non-trivial to translate human language instructions all the way to low-level leg joint actions. We propose NaVILA, a 2-level framework that unifies a Vision-Language-Action model (VLA) with locomotion skills. Instead of directly predicting low-level actions from VLA, NaVILA first generates mid-level actions with spatial information in the form of language, (e.g., "moving forward 75cm"), which serves as an input for a visual locomotion RL policy for execution. NaVILA substantially improves previous approaches on existing benchmarks. The same advantages are demonstrated in our newly developed benchmarks with IsaacLab, featuring more realistic scenes, low-level controls, and real-world robot experiments. We show more results at https://navila-bot.github.io/
Learning Force Control for Legged Manipulation
May 02, 2024Controlling contact forces during interactions is critical for locomotion and manipulation tasks. While sim-to-real reinforcement learning (RL) has succeeded in many contact-rich problems, current RL methods achieve forceful interactions implicitly without explicitly regulating forces. We propose a method for training RL policies for direct force control without requiring access to force sensing. We showcase our method on a whole-body control platform of a quadruped robot with an arm. Such force control enables us to perform gravity compensation and impedance control, unlocking compliant whole-body manipulation. The learned whole-body controller with variable compliance makes it intuitive for humans to teleoperate the robot by only commanding the manipulator, and the robot's body adjusts automatically to achieve the desired position and force. Consequently, a human teleoperator can easily demonstrate a wide variety of loco-manipulation tasks. To the best of our knowledge, we provide the first deployment of learned whole-body force control in legged manipulators, paving the way for more versatile and adaptable legged robots.
RoboDuet: A Framework Affording Mobile-Manipulation and Cross-Embodiment
Mar 27, 2024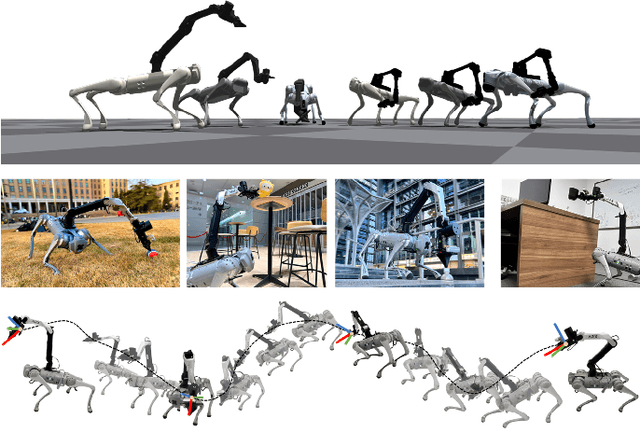
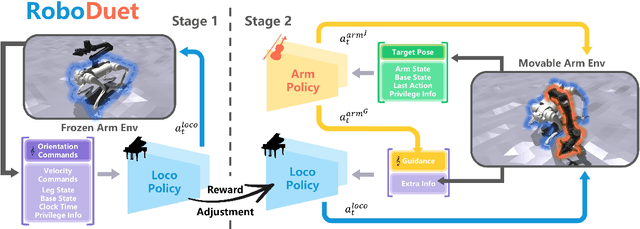
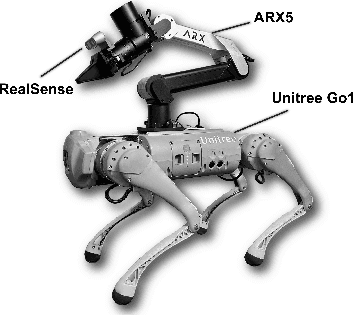
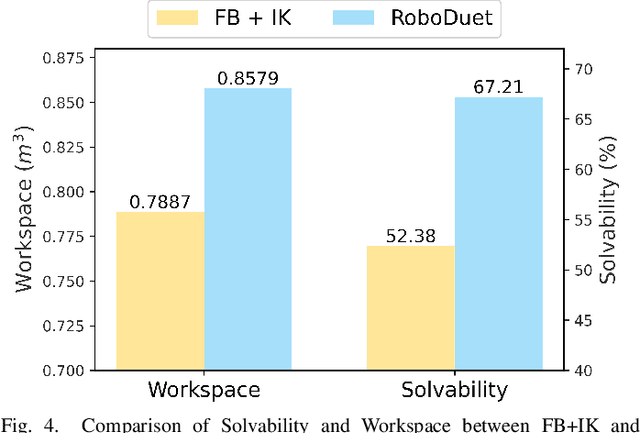
Combining the mobility of legged robots with the manipulation skills of arms has the potential to significantly expand the operational range and enhance the capabilities of robotic systems in performing various mobile manipulation tasks. Existing approaches are confined to imprecise six degrees of freedom (DoF) manipulation and possess a limited arm workspace. In this paper, we propose a novel framework, RoboDuet, which employs two collaborative policies to realize locomotion and manipulation simultaneously, achieving whole-body control through interactions between each other. Surprisingly, going beyond the large-range pose tracking, we find that the two-policy framework may enable cross-embodiment deployment such as using different quadrupedal robots or other arms. Our experiments demonstrate that the policies trained through RoboDuet can accomplish stable gaits, agile 6D end-effector pose tracking, and zero-shot exchange of legged robots, and can be deployed in the real world to perform various mobile manipulation tasks. Our project page with demo videos is at https://locomanip-duet.github.io .
Visual Whole-Body Control for Legged Loco-Manipulation
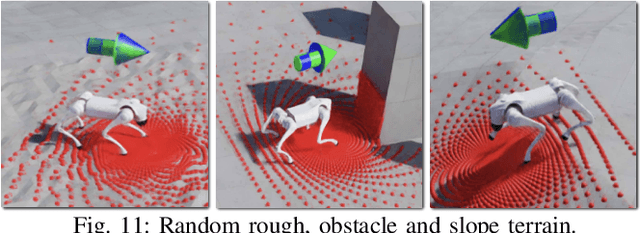
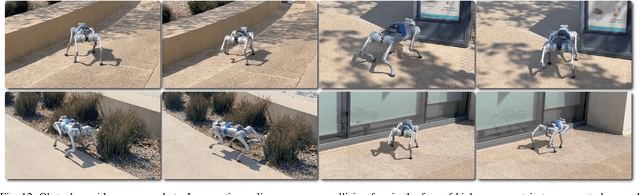
Mar 26, 2024We study the problem of mobile manipulation using legged robots equipped with an arm, namely legged loco-manipulation. The robot legs, while usually utilized for mobility, offer an opportunity to amplify the manipulation capabilities by conducting whole-body control. That is, the robot can control the legs and the arm at the same time to extend its workspace. We propose a framework that can conduct the whole-body control autonomously with visual observations. Our approach, namely Visual Whole-Body Control(VBC), is composed of a low-level policy using all degrees of freedom to track the end-effector manipulator position and a high-level policy proposing the end-effector position based on visual inputs. We train both levels of policies in simulation and perform Sim2Real transfer for real robot deployment. We perform extensive experiments and show significant improvements over baselines in picking up diverse objects in different configurations (heights, locations, orientations) and environments. Project page: https://wholebody-b1.github.io
Expressive Whole-Body Control for Humanoid Robots
Mar 06, 2024Can we enable humanoid robots to generate rich, diverse, and expressive motions in the real world? We propose to learn a whole-body control policy on a human-sized robot to mimic human motions as realistic as possible. To train such a policy, we leverage the large-scale human motion capture data from the graphics community in a Reinforcement Learning framework. However, directly performing imitation learning with the motion capture dataset would not work on the real humanoid robot, given the large gap in degrees of freedom and physical capabilities. Our method Expressive Whole-Body Control (Exbody) tackles this problem by encouraging the upper humanoid body to imitate a reference motion, while relaxing the imitation constraint on its two legs and only requiring them to follow a given velocity robustly. With training in simulation and Sim2Real transfer, our policy can control a humanoid robot to walk in different styles, shake hands with humans, and even dance with a human in the real world. We conduct extensive studies and comparisons on diverse motions in both simulation and the real world to show the effectiveness of our approach.
Learning to See Physical Properties with Active Sensing Motor Policies
Nov 02, 2023



Knowledge of terrain's physical properties inferred from color images can aid in making efficient robotic locomotion plans. However, unlike image classification, it is unintuitive for humans to label image patches with physical properties. Without labeled data, building a vision system that takes as input the observed terrain and predicts physical properties remains challenging. We present a method that overcomes this challenge by self-supervised labeling of images captured by robots during real-world traversal with physical property estimators trained in simulation. To ensure accurate labeling, we introduce Active Sensing Motor Policies (ASMP), which are trained to explore locomotion behaviors that increase the accuracy of estimating physical parameters. For instance, the quadruped robot learns to swipe its foot against the ground to estimate the friction coefficient accurately. We show that the visual system trained with a small amount of real-world traversal data accurately predicts physical parameters. The trained system is robust and works even with overhead images captured by a drone despite being trained on data collected by cameras attached to a quadruped robot walking on the ground.
DribbleBot: Dynamic Legged Manipulation in the Wild
Apr 03, 2023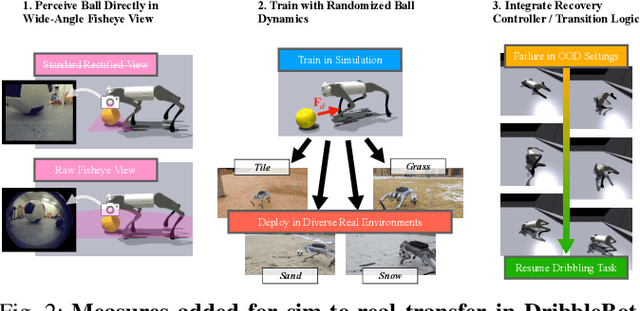
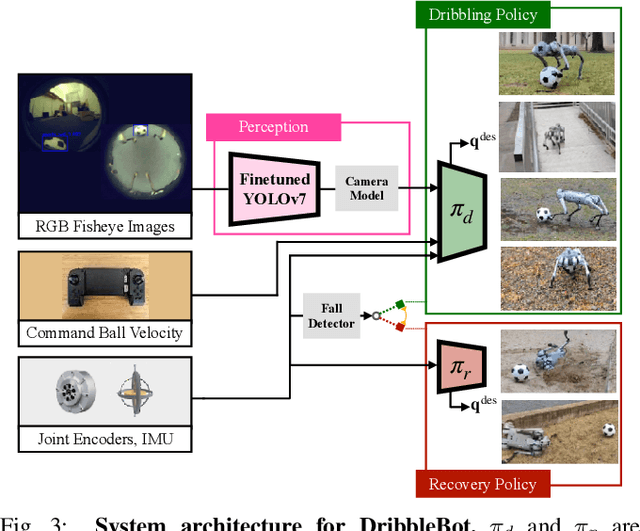
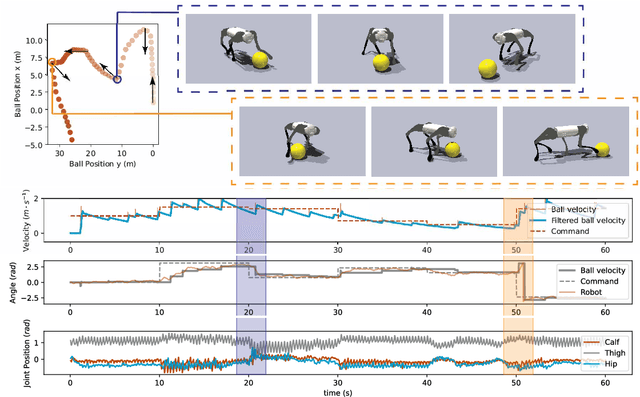
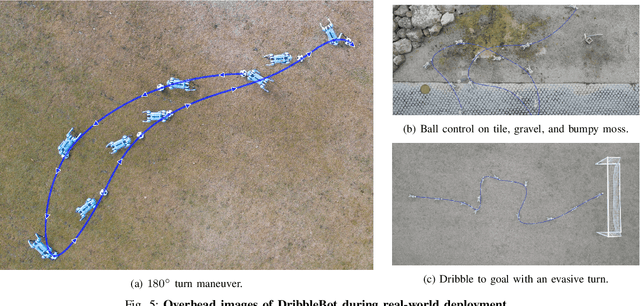
DribbleBot (Dexterous Ball Manipulation with a Legged Robot) is a legged robotic system that can dribble a soccer ball under the same real-world conditions as humans (i.e., in-the-wild). We adopt the paradigm of training policies in simulation using reinforcement learning and transferring them into the real world. We overcome critical challenges of accounting for variable ball motion dynamics on different terrains and perceiving the ball using body-mounted cameras under the constraints of onboard computing. Our results provide evidence that current quadruped platforms are well-suited for studying dynamic whole-body control problems involving simultaneous locomotion and manipulation directly from sensory observations.
Hierarchical Reinforcement Learning for Precise Soccer Shooting Skills using a Quadrupedal Robot
Aug 01, 2022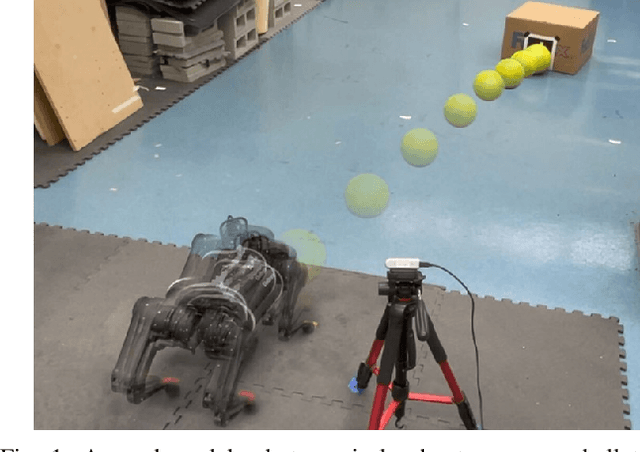
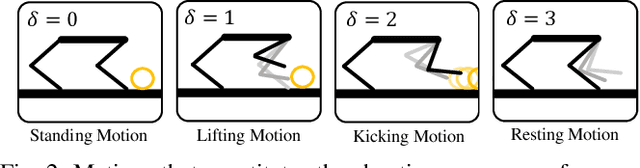
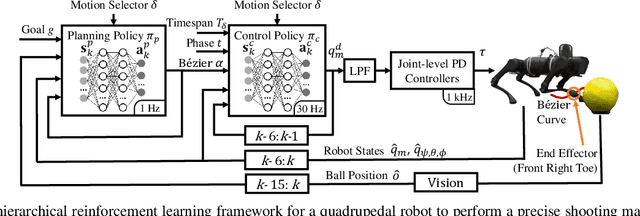
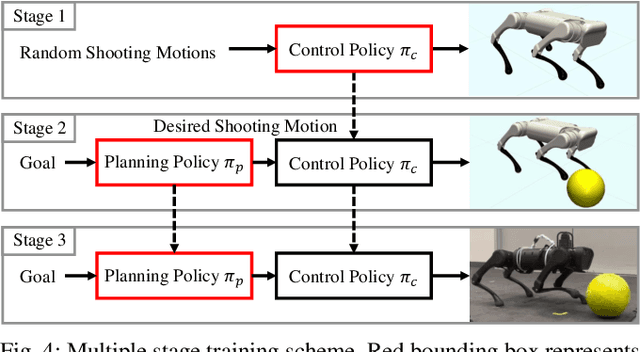
We address the problem of enabling quadrupedal robots to perform precise shooting skills in the real world using reinforcement learning. Developing algorithms to enable a legged robot to shoot a soccer ball to a given target is a challenging problem that combines robot motion control and planning into one task. To solve this problem, we need to consider the dynamics limitation and motion stability during the control of a dynamic legged robot. Moreover, we need to consider motion planning to shoot the hard-to-model deformable ball rolling on the ground with uncertain friction to a desired location. In this paper, we propose a hierarchical framework that leverages deep reinforcement learning to train (a) a robust motion control policy that can track arbitrary motions and (b) a planning policy to decide the desired kicking motion to shoot a soccer ball to a target. We deploy the proposed framework on an A1 quadrupedal robot and enable it to accurately shoot the ball to random targets in the real world.