Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDribbleBot: Dynamic Legged Manipulation in the Wild
Paper and Code
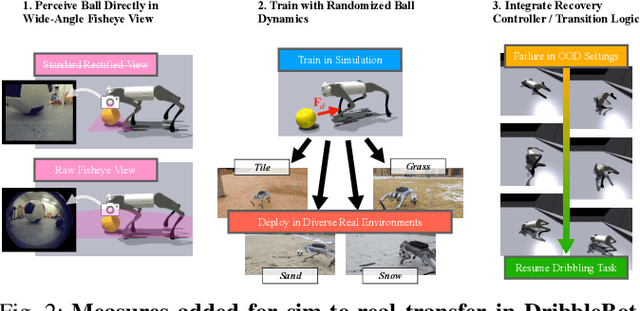
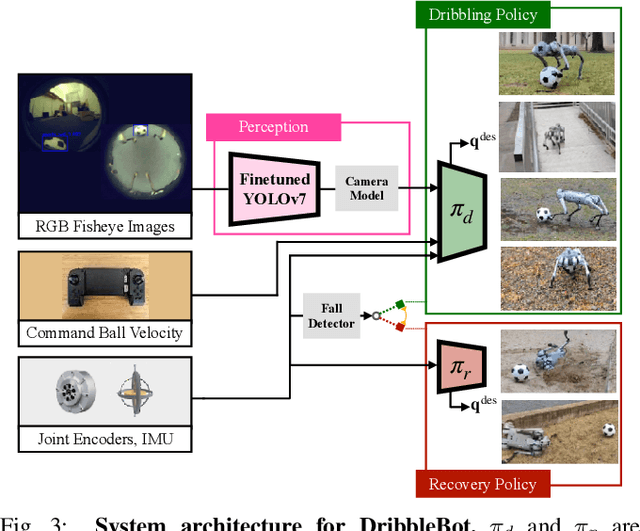
DribbleBot (Dexterous Ball Manipulation with a Legged Robot) is a legged robotic system that can dribble a soccer ball under the same real-world conditions as humans (i.e., in-the-wild). We adopt the paradigm of training policies in simulation using reinforcement learning and transferring them into the real world. We overcome critical challenges of accounting for variable ball motion dynamics on different terrains and perceiving the ball using body-mounted cameras under the constraints of onboard computing. Our results provide evidence that current quadruped platforms are well-suited for studying dynamic whole-body control problems involving simultaneous locomotion and manipulation directly from sensory observations.
* To appear at the IEEE Conference on Robotics and Automation (ICRA),
2023. Video is available at https://gmargo11.github.io/dribblebot/
View paper on