 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeELMP: Efficient Learning for Motion Planning via Analytical Policy Gradients
Jun 30, 2026Neural Motion Planners (NMPs) enable fast reactive motion generation, but adapting them to new environments typically requires recollecting large expert datasets, which is computationally prohibitive. We propose ELMP, a framework for data-efficient adaptation via self-supervised fine-tuning. Rather than generating additional expert trajectories with expensive global planners, ELMP directly optimizes the policy through a differentiable kinematic layer using dense collision, target-reaching, and smoothness objectives. This replaces expert data generation with rapid problem sampling, reducing per-sample adaptation cost by roughly two orders of magnitude. To further support robust generalization across changing kinematic chains, we introduce a mechanism to explicitly encode tool geometry via point clouds. Benchmarked against classical and neural baselines, ELMP achieves an 84.8% average success rate with orders-of-magnitude lower cold-start latency than classical methods. In unseen environments, self-supervised fine-tuning improves success rate from 57.3% (zero-shot) to 89.8%, removing the data collection bottleneck. Our approach maintains millisecond-level inference latency and is validated on a physical Franka Emika Panda robot.
Grounding Generative Policies in Physics: Optimization-Guided Diffusion for Robot Control
Jun 23, 2026Diffusion models sample effectively from high-dimensional, multimodal distributions, but their outputs may violate deployment constraints. For task-space robot policies, generated grasps, waypoints, or trajectories can be distributionally valid yet infeasible, violating reachability, collision-avoidance, or closed-loop executability requirements. This embodiment gap limits zero-shot deployment across robots, even when the task-space behavior itself is transferable. We propose an inference-time optimization framework that couples the behavior generation to physical feasibility by formulating diffusion guidance as a constrained optimization problem. Our key insight is to replace the sampling perturbation in the backward process with an optimized correction, allowing hard constraints or soft penalties to be imposed during sampling without the need to retrain the diffusion model, while keeping samples close to the learned prior. We evaluate the method on dexterous grasp synthesis with reachability and collision-avoidance constraints, and dynamic manipulation with controller-level trackability constraints. Across settings and robot embodiments, optimization-guided denoising matches the feasibility of projection- and gradient-guidance baselines while better preserving grasp quality, and improving controller-level executability and task success, with task success improving by up to 20pp. on dexterous grasping and 23pp. on visuomotor manipulation over the best baseline.
Geometric Action Model for Robot Policy Learning
Jun 15, 2026Generalist robot policies must follow user instructions while reasoning about how objects, cameras, and robot actions interact in the 3D physical world. Recent vision-language-action models (VLAs) and video world-action models (WAMs) inherit strong semantic or temporal priors from large-scale foundation models, but they still operate primarily on 2D image frames or 2D-derived latent spaces, leaving implicit the 3D geometry required for contact-rich manipulation. We propose the Geometric Action Model (GAM), a language-conditioned manipulation policy that directly repurposes a pretrained geometric foundation model (GFM) as a shared substrate for perception, temporal prediction, and action decoding. GAM splits the GFM at an intermediate layer: the shallow layers serve as an observation encoder, and a causal future predictor inserted at the split layer forecasts future latent tokens conditioned on language, proprioception, and action history. The predicted future tokens are then routed through the remaining GFM blocks for feature propagation and decoding, allowing a single backbone to produce both future geometry and actions. This design equips the GFM with language-conditioned temporal world modeling through minimal architectural modification while preserving its rich geometric priors. Across a broad suite of simulation and real-robot manipulation benchmarks, GAM is more accurate, more robust, faster, and lighter than current foundation-model-scale baselines.
VR-DAgger: Immersive VR for Dexterous Data Collection and Uncertainty-Guided On-Policy Correction
May 26, 2026Learning from demonstrations is effective for robotic manipulation, but collecting sufficient task-specific data remains a major bottleneck. Under distribution shift, small errors compound, performance degrades, and expert time is often spent on redundant, low-value corrections instead of the few critical failure cases.
Pretraining in Actor-Critic Reinforcement Learning for Robot Motion Control
Oct 14, 2025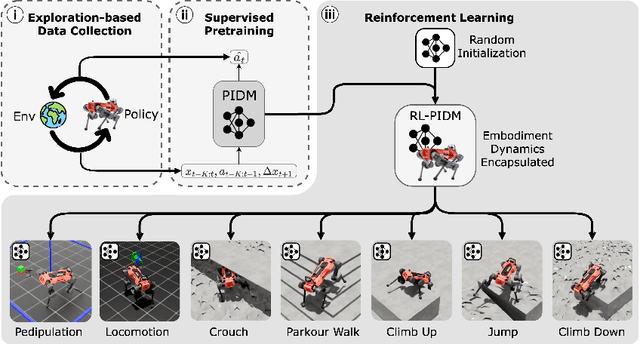

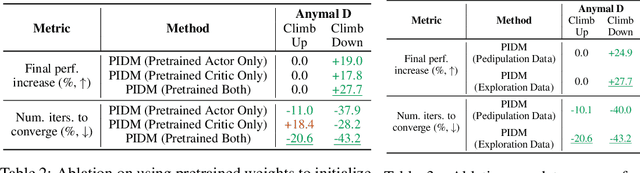
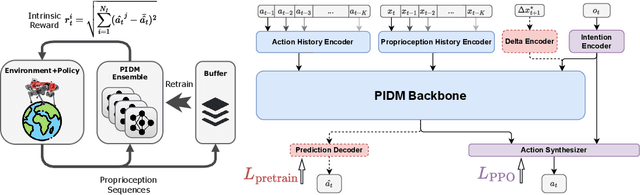
The pretraining-finetuning paradigm has facilitated numerous transformative advancements in artificial intelligence research in recent years. However, in the domain of reinforcement learning (RL) for robot motion control, individual skills are often learned from scratch despite the high likelihood that some generalizable knowledge is shared across all task-specific policies belonging to a single robot embodiment. This work aims to define a paradigm for pretraining neural network models that encapsulate such knowledge and can subsequently serve as a basis for warm-starting the RL process in classic actor-critic algorithms, such as Proximal Policy Optimization (PPO). We begin with a task-agnostic exploration-based data collection algorithm to gather diverse, dynamic transition data, which is then used to train a Proprioceptive Inverse Dynamics Model (PIDM) through supervised learning. The pretrained weights are loaded into both the actor and critic networks to warm-start the policy optimization of actual tasks. We systematically validated our proposed method on seven distinct robot motion control tasks, showing significant benefits to this initialization strategy. Our proposed approach on average improves sample efficiency by 40.1% and task performance by 7.5%, compared to random initialization. We further present key ablation studies and empirical analyses that shed light on the mechanisms behind the effectiveness of our method.
Whole-body end-effector pose tracking
Sep 24, 2024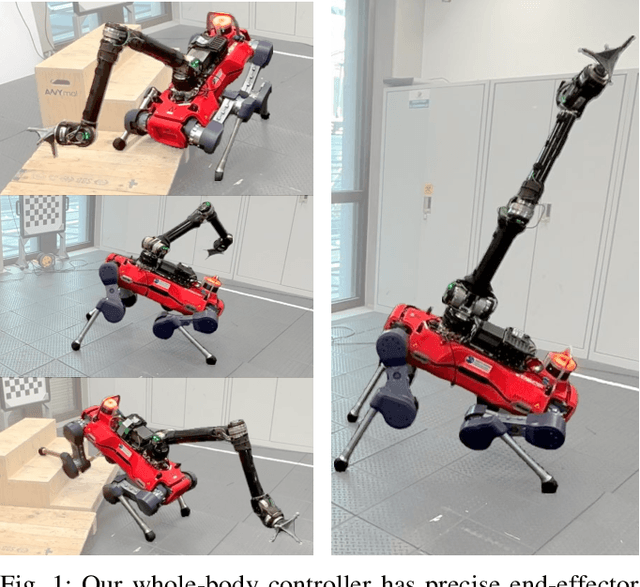
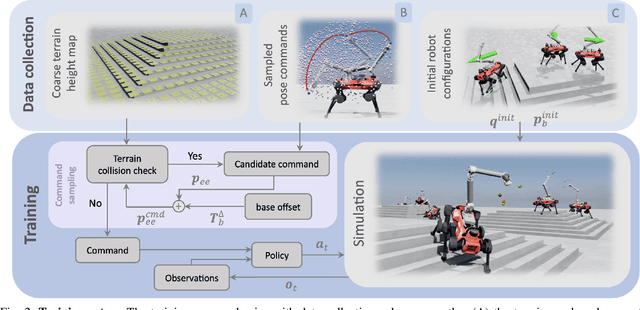
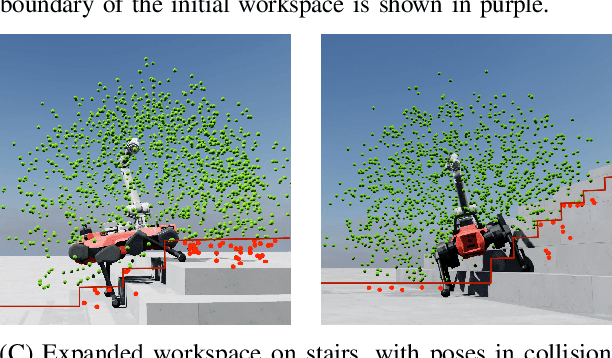
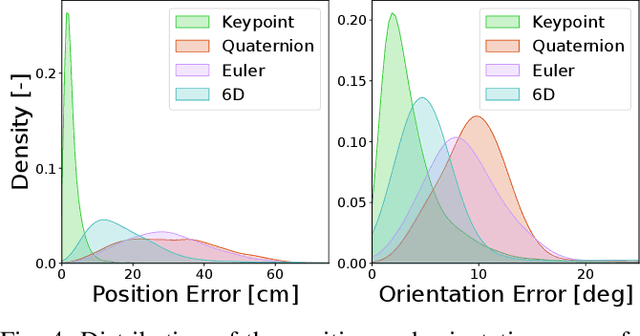
Combining manipulation with the mobility of legged robots is essential for a wide range of robotic applications. However, integrating an arm with a mobile base significantly increases the system's complexity, making precise end-effector control challenging. Existing model-based approaches are often constrained by their modeling assumptions, leading to limited robustness. Meanwhile, recent Reinforcement Learning (RL) implementations restrict the arm's workspace to be in front of the robot or track only the position to obtain decent tracking accuracy. In this work, we address these limitations by introducing a whole-body RL formulation for end-effector pose tracking in a large workspace on rough, unstructured terrains. Our proposed method involves a terrain-aware sampling strategy for the robot's initial configuration and end-effector pose commands, as well as a game-based curriculum to extend the robot's operating range. We validate our approach on the ANYmal quadrupedal robot with a six DoF robotic arm. Through our experiments, we show that the learned controller achieves precise command tracking over a large workspace and adapts across varying terrains such as stairs and slopes. On deployment, it achieves a pose-tracking error of 2.64 cm and 3.64 degrees, outperforming existing competitive baselines.
Learning Force Control for Legged Manipulation
May 02, 2024Controlling contact forces during interactions is critical for locomotion and manipulation tasks. While sim-to-real reinforcement learning (RL) has succeeded in many contact-rich problems, current RL methods achieve forceful interactions implicitly without explicitly regulating forces. We propose a method for training RL policies for direct force control without requiring access to force sensing. We showcase our method on a whole-body control platform of a quadruped robot with an arm. Such force control enables us to perform gravity compensation and impedance control, unlocking compliant whole-body manipulation. The learned whole-body controller with variable compliance makes it intuitive for humans to teleoperate the robot by only commanding the manipulator, and the robot's body adjusts automatically to achieve the desired position and force. Consequently, a human teleoperator can easily demonstrate a wide variety of loco-manipulation tasks. To the best of our knowledge, we provide the first deployment of learned whole-body force control in legged manipulators, paving the way for more versatile and adaptable legged robots.