 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReinforcing Dual-Path Reasoning in Spatial Vision Language Models
Jun 16, 2026Spatial VLMs have made substantial progress in geometric perception, yet complex spatial reasoning requiring multi-step inference over depth, distance, and scene relations remains challenging. Moreover, different spatial queries call for fundamentally different strategies: some are best addressed through purely linguistic, step-by-step deduction, while others require explicit 3D grounding before quantitative inference. We present Dual-Path Spatial Reasoning via Reinforcement Learning for Spatial VLMs (SR-REAL), a unified framework that equips a spatial VLM with two complementary reasoning paths: Language-Only Reasoning (LOR), which performs step-by-step linguistic deduction, and Detect-Then-Reason (DTR), which detects 3D geometric cues (e.g., centers or bounding boxes) via region tokens before explicit geometric inference. SR-REAL begins with a cold-start supervised fine-tuning stage that constructs LOR and DTR chain-of-thought supervision and exposes a region-to-3D interface, followed by RL that optimizes the policy model with accuracy and format rewards; for DTR, a discrete center-based detection reward further refines geometric alignment. Across diverse spatial benchmarks, SR-REAL significantly outperforms spatial VLM baselines: (i) a single RL-trained model supports both reasoning paths, with DTR excelling in region-aware tasks through precise 3D localization and LOR enhancing general spatial reasoning; (ii) jointly training both paths fosters mutual reinforcement; (iii) high-quality, blended cold-start data is crucial for stable RL optimization; and (iv) the model generalizes across datasets and domains without per-task tuning, demonstrating positive transfer between LOR and DTR.
Cosmos 3: Omnimodal World Models for Physical AI
Jun 01, 2026We introduce Cosmos 3, a family of omnimodal world models designed to jointly process and generate language, image, video, audio, and action sequences within a unified mixture-of-transformers architecture. By supporting highly flexible input-output configurations, Cosmos 3 seamlessly unifies critical modalities for Physical AI -- effectively subsuming vision-language models, video generators, world simulators, and world-action models into a single framework. Our evaluation demonstrates that Cosmos 3 establishes a new state-of-the-art across a diverse suite of understanding and generation tasks, demonstrating omnimodal world models as scalable, general-purpose backbones for embodied agents. Our post-trained Cosmos 3 models were ranked as the best open-source Text-to-Image and Image-to-Video models by Artificial Analysis, and the best policy model by RoboArena at the time the technical report was written. To accelerate open research and deployment in Physical AI, we make our code, model checkpoints, curated synthetic datasets, and evaluation benchmark available under the Linux Foundation's OpenMDW-1.1 https://openmdw.ai/license/1-1/ License at https://github.com/nvidia/cosmos}{github.com/nvidia/cosmos and https://huggingface.co/collections/nvidia/cosmos3 . The project website is available at https://research.nvidia.com/labs/cosmos-lab/cosmos3 .
Grounded 3D-Aware Spatial Vision-Language Modeling
May 28, 2026We present GR3D, a spatial vision language model equipped with three complementary grounding capabilities--explicit 2D grounding, implicit 2D grounding, and monocular 3D grounding--within a single framework. GR3D introduces an implicit grounding mechanism that identifies entity mentions during generation and inserts the corresponding region tokens into the text stream, allowing the model to reference visual evidence on the fly when producing spatial chain-of-thought responses. In parallel, a region-prompted monocular 3D grounding design predicts 3D bounding boxes in the camera view from grounded region queries, supported by intrinsic-aware normalization and dense geometric supervision. Together, these grounding capabilities enable GR3D to decompose complex spatial understanding problems into grounded 2D perception followed by 3D inference. GR3D achieves consistent improvements across grounded and non-grounded spatial benchmarks, demonstrating grounding as an effective inductive bias for strengthening spatial understanding in VLMs. These grounding capabilities collectively enhance general spatial understanding beyond the grounding task itself.
Long-Horizon Manipulation via Trace-Conditioned VLA Planning
Apr 23, 2026Long-horizon manipulation remains challenging for vision-language-action (VLA) policies: real tasks are multi-step, progress-dependent, and brittle to compounding execution errors. We present LoHo-Manip, a modular framework that scales short-horizon VLA execution to long-horizon instruction following via a dedicated task-management VLM. The manager is decoupled from the executor and is invoked in a receding-horizon manner: given the current observation, it predicts a progress-aware remaining plan that combines (i) a subtask sequence with an explicit done + remaining split as lightweight language memory, and (ii) a visual trace -- a compact 2D keypoint trajectory prompt specifying where to go and what to approach next. The executor VLA is adapted to condition on the rendered trace, thereby turning long-horizon decision-making into repeated local control by following the trace. Crucially, predicting the remaining plan at each step yields an implicit closed loop: failed steps persist in subsequent outputs, and traces update accordingly, enabling automatic continuation and replanning without hand-crafted recovery logic or brittle visual-history buffers. Extensive experiments spanning embodied planning, long-horizon reasoning, trajectory prediction, and end-to-end manipulation in simulation and on a real Franka robot demonstrate strong gains in long-horizon success, robustness, and out-of-distribution generalization. Project page: https://www.liuisabella.com/LoHoManip
3D Aware Region Prompted Vision Language Model
Sep 16, 2025



We present Spatial Region 3D (SR-3D) aware vision-language model that connects single-view 2D images and multi-view 3D data through a shared visual token space. SR-3D supports flexible region prompting, allowing users to annotate regions with bounding boxes, segmentation masks on any frame, or directly in 3D, without the need for exhaustive multi-frame labeling. We achieve this by enriching 2D visual features with 3D positional embeddings, which allows the 3D model to draw upon strong 2D priors for more accurate spatial reasoning across frames, even when objects of interest do not co-occur within the same view. Extensive experiments on both general 2D vision language and specialized 3D spatial benchmarks demonstrate that SR-3D achieves state-of-the-art performance, underscoring its effectiveness for unifying 2D and 3D representation space on scene understanding. Moreover, we observe applicability to in-the-wild videos without sensory 3D inputs or ground-truth 3D annotations, where SR-3D accurately infers spatial relationships and metric measurements.
EgoVLA: Learning Vision-Language-Action Models from Egocentric Human Videos
Jul 16, 2025Real robot data collection for imitation learning has led to significant advancements in robotic manipulation. However, the requirement for robot hardware in the process fundamentally constrains the scale of the data. In this paper, we explore training Vision-Language-Action (VLA) models using egocentric human videos. The benefit of using human videos is not only for their scale but more importantly for the richness of scenes and tasks. With a VLA trained on human video that predicts human wrist and hand actions, we can perform Inverse Kinematics and retargeting to convert the human actions to robot actions. We fine-tune the model using a few robot manipulation demonstrations to obtain the robot policy, namely EgoVLA. We propose a simulation benchmark called Isaac Humanoid Manipulation Benchmark, where we design diverse bimanual manipulation tasks with demonstrations. We fine-tune and evaluate EgoVLA with Isaac Humanoid Manipulation Benchmark and show significant improvements over baselines and ablate the importance of human data. Videos can be found on our website: https://rchalyang.github.io/EgoVLA
NVILA: Efficient Frontier Visual Language Models
Dec 05, 2024
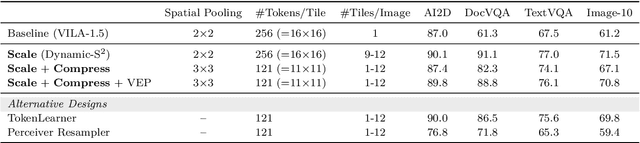
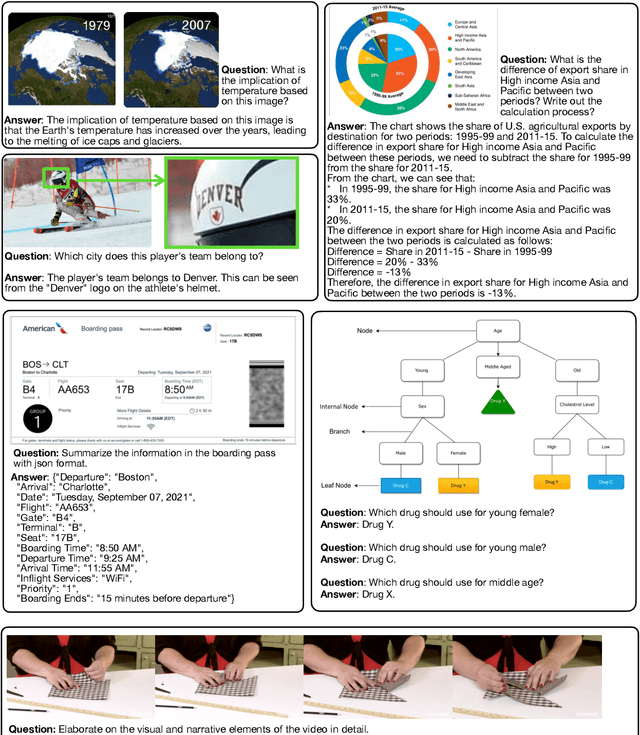
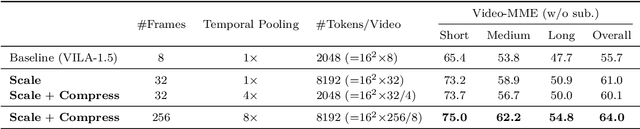
Visual language models (VLMs) have made significant advances in accuracy in recent years. However, their efficiency has received much less attention. This paper introduces NVILA, a family of open VLMs designed to optimize both efficiency and accuracy. Building on top of VILA, we improve its model architecture by first scaling up the spatial and temporal resolutions, and then compressing visual tokens. This "scale-then-compress" approach enables NVILA to efficiently process high-resolution images and long videos. We also conduct a systematic investigation to enhance the efficiency of NVILA throughout its entire lifecycle, from training and fine-tuning to deployment. NVILA matches or surpasses the accuracy of many leading open and proprietary VLMs across a wide range of image and video benchmarks. At the same time, it reduces training costs by 4.5X, fine-tuning memory usage by 3.4X, pre-filling latency by 1.6-2.2X, and decoding latency by 1.2-2.8X. We will soon make our code and models available to facilitate reproducibility.
NaVILA: Legged Robot Vision-Language-Action Model for Navigation
Dec 05, 2024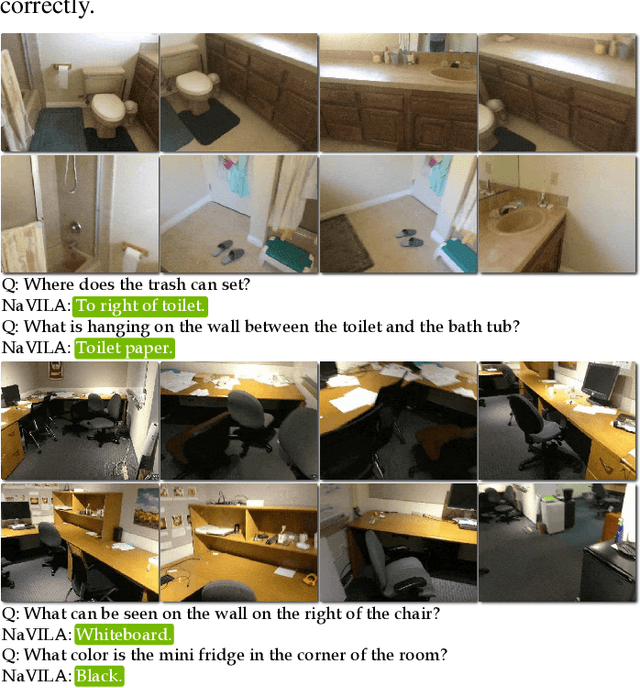
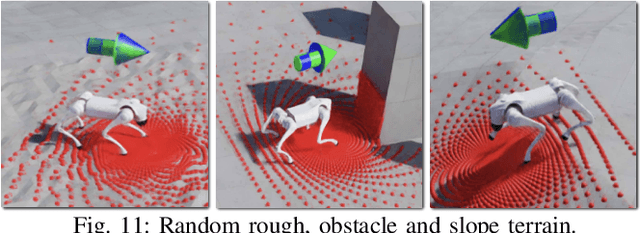
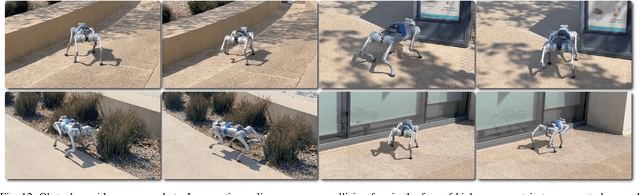

This paper proposes to solve the problem of Vision-and-Language Navigation with legged robots, which not only provides a flexible way for humans to command but also allows the robot to navigate through more challenging and cluttered scenes. However, it is non-trivial to translate human language instructions all the way to low-level leg joint actions. We propose NaVILA, a 2-level framework that unifies a Vision-Language-Action model (VLA) with locomotion skills. Instead of directly predicting low-level actions from VLA, NaVILA first generates mid-level actions with spatial information in the form of language, (e.g., "moving forward 75cm"), which serves as an input for a visual locomotion RL policy for execution. NaVILA substantially improves previous approaches on existing benchmarks. The same advantages are demonstrated in our newly developed benchmarks with IsaacLab, featuring more realistic scenes, low-level controls, and real-world robot experiments. We show more results at https://navila-bot.github.io/
SpatialRGPT: Grounded Spatial Reasoning in Vision Language Model
Jun 03, 2024



Vision Language Models (VLMs) have demonstrated remarkable performance in 2D vision and language tasks. However, their ability to reason about spatial arrangements remains limited. In this work, we introduce Spatial Region GPT (SpatialRGPT) to enhance VLMs' spatial perception and reasoning capabilities. SpatialRGPT advances VLMs' spatial understanding through two key innovations: (1) a data curation pipeline that enables effective learning of regional representation from 3D scene graphs, and (2) a flexible plugin module for integrating depth information into the visual encoder of existing VLMs. During inference, when provided with user-specified region proposals, SpatialRGPT can accurately perceive their relative directions and distances. Additionally, we propose SpatialRGBT-Bench, a benchmark with ground-truth 3D annotations encompassing indoor, outdoor, and simulated environments, for evaluating 3D spatial cognition in VLMs. Our results demonstrate that SpatialRGPT significantly enhances performance in spatial reasoning tasks, both with and without local region prompts. The model also exhibits strong generalization capabilities, effectively reasoning about complex spatial relations and functioning as a region-aware dense reward annotator for robotic tasks. Code, dataset, and benchmark will be released at https://www.anjiecheng.me/SpatialRGPT
TUVF: Learning Generalizable Texture UV Radiance Fields
May 10, 2023



Textures are a vital aspect of creating visually appealing and realistic 3D models. In this paper, we study the problem of generating high-fidelity texture given shapes of 3D assets, which has been relatively less explored compared with generic 3D shape modeling. Our goal is to facilitate a controllable texture generation process, such that one texture code can correspond to a particular appearance style independent of any input shapes from a category. We introduce Texture UV Radiance Fields (TUVF) that generate textures in a learnable UV sphere space rather than directly on the 3D shape. This allows the texture to be disentangled from the underlying shape and transferable to other shapes that share the same UV space, i.e., from the same category. We integrate the UV sphere space with the radiance field, which provides a more efficient and accurate representation of textures than traditional texture maps. We perform our experiments on real-world object datasets where we achieve not only realistic synthesis but also substantial improvements over state-of-the-arts on texture controlling and editing. Project Page: https://www.anjiecheng.me/TUVF