 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMitigating Hallucination of Large Vision-Language Models via Dynamic Logits Calibration
Jun 26, 2025Large Vision-Language Models (LVLMs) have demonstrated significant advancements in multimodal understanding, yet they are frequently hampered by hallucination-the generation of text that contradicts visual input. Existing training-free decoding strategies exhibit critical limitations, including the use of static constraints that do not adapt to semantic drift during generation, inefficiency stemming from the need for multiple forward passes, and degradation of detail due to overly rigid intervention rules. To overcome these challenges, this paper introduces Dynamic Logits Calibration (DLC), a novel training-free decoding framework designed to dynamically align text generation with visual evidence at inference time. At the decoding phase, DLC step-wise employs CLIP to assess the semantic alignment between the input image and the generated text sequence. Then, the Relative Visual Advantage (RVA) of candidate tokens is evaluated against a dynamically updated contextual baseline, adaptively adjusting output logits to favor tokens that are visually grounded. Furthermore, an adaptive weighting mechanism, informed by a real-time context alignment score, carefully balances the visual guidance while ensuring the overall quality of the textual output. Extensive experiments conducted across diverse benchmarks and various LVLM architectures (such as LLaVA, InstructBLIP, and MiniGPT-4) demonstrate that DLC significantly reduces hallucinations, outperforming current methods while maintaining high inference efficiency by avoiding multiple forward passes. Overall, we present an effective and efficient decoding-time solution to mitigate hallucinations, thereby enhancing the reliability of LVLMs for more practices. Code will be released on Github.
Online camera-pose-free stereo endoscopic tissue deformation recovery with tissue-invariant vision-biomechanics consistency
Jun 24, 2025Tissue deformation recovery based on stereo endoscopic images is crucial for tool-tissue interaction analysis and benefits surgical navigation and autonomous soft tissue manipulation. Previous research suffers from the problems raised from camera motion, occlusion, large tissue deformation, lack of tissue-specific biomechanical priors, and reliance on offline processing. Unlike previous studies where the tissue geometry and deformation are represented by 3D points and displacements, the proposed method models tissue geometry as the 3D point and derivative map and tissue deformation as the 3D displacement and local deformation map. For a single surface point, 6 parameters are used to describe its rigid motion and 3 parameters for its local deformation. The method is formulated under the camera-centric setting, where all motions are regarded as the scene motion with respect to the camera. Inter-frame alignment is realized by optimizing the inter-frame deformation, making it unnecessary to estimate camera pose. The concept of the canonical map is introduced to optimize tissue geometry and deformation in an online approach. Quantitative and qualitative experiments were conducted using in vivo and ex vivo laparoscopic datasets. With the inputs of depth and optical flow, the method stably models tissue geometry and deformation even when the tissue is partially occluded or moving outside the field of view. Results show that the 3D reconstruction accuracy in the non-occluded and occluded areas reaches 0.37$\pm$0.27 mm and 0.39$\pm$0.21 mm in terms of surface distance, respectively. The method can also estimate surface strain distribution during various manipulations as an extra modality for mechanical-based analysis.
C3S3: Complementary Competition and Contrastive Selection for Semi-Supervised Medical Image Segmentation
Jun 09, 2025For the immanent challenge of insufficiently annotated samples in the medical field, semi-supervised medical image segmentation (SSMIS) offers a promising solution. Despite achieving impressive results in delineating primary target areas, most current methodologies struggle to precisely capture the subtle details of boundaries. This deficiency often leads to significant diagnostic inaccuracies. To tackle this issue, we introduce C3S3, a novel semi-supervised segmentation model that synergistically integrates complementary competition and contrastive selection. This design significantly sharpens boundary delineation and enhances overall precision. Specifically, we develop an $\textit{Outcome-Driven Contrastive Learning}$ module dedicated to refining boundary localization. Additionally, we incorporate a $\textit{Dynamic Complementary Competition}$ module that leverages two high-performing sub-networks to generate pseudo-labels, thereby further improving segmentation quality. The proposed C3S3 undergoes rigorous validation on two publicly accessible datasets, encompassing the practices of both MRI and CT scans. The results demonstrate that our method achieves superior performance compared to previous cutting-edge competitors. Especially, on the 95HD and ASD metrics, our approach achieves a notable improvement of at least $6\%$, highlighting the significant advancements. The code is available at https://github.com/Y-TARL/C3S3.
Decoupled Competitive Framework for Semi-supervised Medical Image Segmentation
May 30, 2025Confronting the critical challenge of insufficiently annotated samples in medical domain, semi-supervised medical image segmentation (SSMIS) emerges as a promising solution. Specifically, most methodologies following the Mean Teacher (MT) or Dual Students (DS) architecture have achieved commendable results. However, to date, these approaches face a performance bottleneck due to two inherent limitations, \textit{e.g.}, the over-coupling problem within MT structure owing to the employment of exponential moving average (EMA) mechanism, as well as the severe cognitive bias between two students of DS structure, both of which potentially lead to reduced efficacy, or even model collapse eventually. To mitigate these issues, a Decoupled Competitive Framework (DCF) is elaborated in this work, which utilizes a straightforward competition mechanism for the update of EMA, effectively decoupling students and teachers in a dynamical manner. In addition, the seamless exchange of invaluable and precise insights is facilitated among students, guaranteeing a better learning paradigm. The DCF introduced undergoes rigorous validation on three publicly accessible datasets, which encompass both 2D and 3D datasets. The results demonstrate the superiority of our method over previous cutting-edge competitors. Code will be available at https://github.com/JiaheChen2002/DCF.
VAMO: Efficient Large-Scale Nonconvex Optimization via Adaptive Zeroth Order Variance Reduction
May 20, 2025Optimizing large-scale nonconvex problems, common in machine learning, demands balancing rapid convergence with computational efficiency. First-order (FO) stochastic methods like SVRG provide fast convergence and good generalization but incur high costs due to full-batch gradients in large models. Conversely, zeroth-order (ZO) algorithms reduce this burden using estimated gradients, yet their slow convergence in high-dimensional settings limits practicality. We introduce VAMO (VAriance-reduced Mixed-gradient Optimizer), a stochastic variance-reduced method combining FO mini-batch gradients with lightweight ZO finite-difference probes under an SVRG-style framework. VAMO's hybrid design uses a two-point ZO estimator to achieve a dimension-agnostic convergence rate of $\mathcal{O}(1/T + 1/b)$, where $T$ is the number of iterations and $b$ is the batch-size, surpassing the dimension-dependent slowdown of purely ZO methods and significantly improving over SGD's $\mathcal{O}(1/\sqrt{T})$ rate. Additionally, we propose a multi-point ZO variant that mitigates the $O(1/b)$ error by adjusting number of estimation points to balance convergence and cost, making it ideal for a whole range of computationally constrained scenarios. Experiments including traditional neural network training and LLM finetuning show VAMO outperforms established FO and ZO methods, offering a faster, more flexible option for improved efficiency.
GRUtopia: Dream General Robots in a City at Scale
Jul 15, 2024Recent works have been exploring the scaling laws in the field of Embodied AI. Given the prohibitive costs of collecting real-world data, we believe the Simulation-to-Real (Sim2Real) paradigm is a crucial step for scaling the learning of embodied models. This paper introduces project GRUtopia, the first simulated interactive 3D society designed for various robots. It features several advancements: (a) The scene dataset, GRScenes, includes 100k interactive, finely annotated scenes, which can be freely combined into city-scale environments. In contrast to previous works mainly focusing on home, GRScenes covers 89 diverse scene categories, bridging the gap of service-oriented environments where general robots would be initially deployed. (b) GRResidents, a Large Language Model (LLM) driven Non-Player Character (NPC) system that is responsible for social interaction, task generation, and task assignment, thus simulating social scenarios for embodied AI applications. (c) The benchmark, GRBench, supports various robots but focuses on legged robots as primary agents and poses moderately challenging tasks involving Object Loco-Navigation, Social Loco-Navigation, and Loco-Manipulation. We hope that this work can alleviate the scarcity of high-quality data in this field and provide a more comprehensive assessment of Embodied AI research. The project is available at https://github.com/OpenRobotLab/GRUtopia.
Mixed Gaussian Flow for Diverse Trajectory Prediction
Feb 19, 2024



Existing trajectory prediction studies intensively leverage generative models. Normalizing flow is one of the genres with the advantage of being invertible to derive the probability density of predicted trajectories. However, mapping from a standard Gaussian by a flow-based model hurts the capacity to capture complicated patterns of trajectories, ignoring the under-represented motion intentions in the training data. To solve the problem, we propose a flow-based model to transform a mixed Gaussian prior into the future trajectory manifold. The model shows a better capacity for generating diverse trajectory patterns. Also, by associating each sub-Gaussian with a certain subspace of trajectories, we can generate future trajectories with controllable motion intentions. In such a fashion, the flow-based model is not encouraged to simply seek the most likelihood of the intended manifold anymore but a family of controlled manifolds with explicit interpretability. Our proposed method is demonstrated to show state-of-the-art performance in the quantitative evaluation of sampling well-aligned trajectories in top-M generated candidates. We also demonstrate that it can generate diverse, controllable, and out-of-distribution trajectories. Code is available at https://github.com/mulplue/MGF.
General-Purpose Multi-Modal OOD Detection Framework
Jul 24, 2023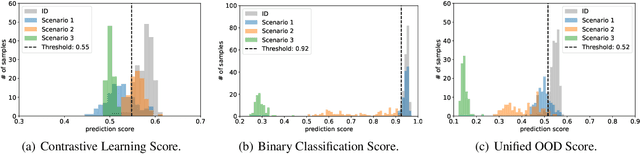
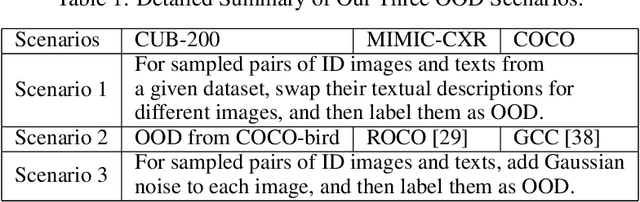
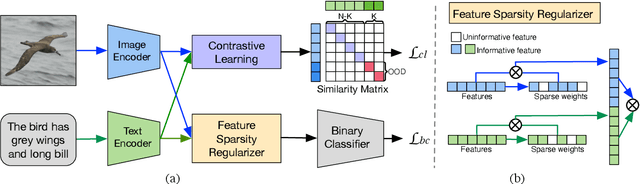

Out-of-distribution (OOD) detection identifies test samples that differ from the training data, which is critical to ensuring the safety and reliability of machine learning (ML) systems. While a plethora of methods have been developed to detect uni-modal OOD samples, only a few have focused on multi-modal OOD detection. Current contrastive learning-based methods primarily study multi-modal OOD detection in a scenario where both a given image and its corresponding textual description come from a new domain. However, real-world deployments of ML systems may face more anomaly scenarios caused by multiple factors like sensor faults, bad weather, and environmental changes. Hence, the goal of this work is to simultaneously detect from multiple different OOD scenarios in a fine-grained manner. To reach this goal, we propose a general-purpose weakly-supervised OOD detection framework, called WOOD, that combines a binary classifier and a contrastive learning component to reap the benefits of both. In order to better distinguish the latent representations of in-distribution (ID) and OOD samples, we adopt the Hinge loss to constrain their similarity. Furthermore, we develop a new scoring metric to integrate the prediction results from both the binary classifier and contrastive learning for identifying OOD samples. We evaluate the proposed WOOD model on multiple real-world datasets, and the experimental results demonstrate that the WOOD model outperforms the state-of-the-art methods for multi-modal OOD detection. Importantly, our approach is able to achieve high accuracy in OOD detection in three different OOD scenarios simultaneously. The source code will be made publicly available upon publication.