 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMetacognitive Reuse: Turning Recurring LLM Reasoning Into Concise Behaviors
Sep 16, 2025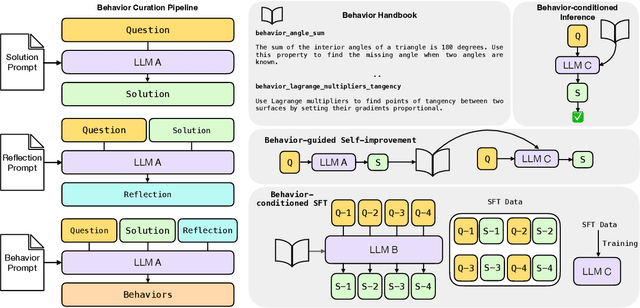



Large language models (LLMs) now solve multi-step problems by emitting extended chains of thought. During the process, they often re-derive the same intermediate steps across problems, inflating token usage and latency. This saturation of the context window leaves less capacity for exploration. We study a simple mechanism that converts recurring reasoning fragments into concise, reusable "behaviors" (name + instruction) via the model's own metacognitive analysis of prior traces. These behaviors are stored in a "behavior handbook" which supplies them to the model in-context at inference or distills them into parameters via supervised fine-tuning. This approach achieves improved test-time reasoning across three different settings - 1) Behavior-conditioned inference: Providing the LLM relevant behaviors in-context during reasoning reduces number of reasoning tokens by up to 46% while matching or improving baseline accuracy; 2) Behavior-guided self-improvement: Without any parameter updates, the model improves its own future reasoning by leveraging behaviors from its own past problem solving attempts. This yields up to 10% higher accuracy than a naive critique-and-revise baseline; and 3) Behavior-conditioned SFT: SFT on behavior-conditioned reasoning traces is more effective at converting non-reasoning models into reasoning models as compared to vanilla SFT. Together, these results indicate that turning slow derivations into fast procedural hints enables LLMs to remember how to reason, not just what to conclude.
CTRL-O: Language-Controllable Object-Centric Visual Representation Learning
Mar 27, 2025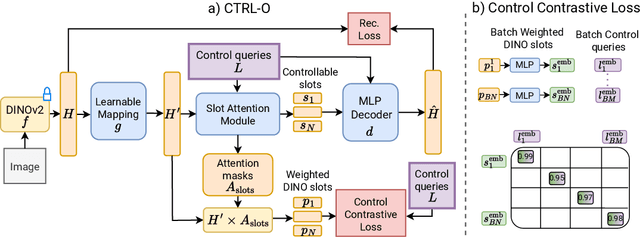
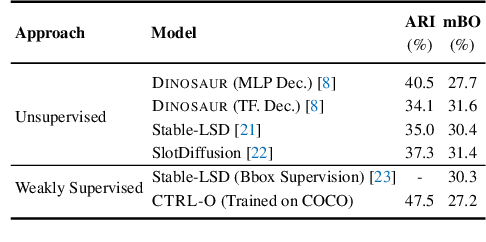
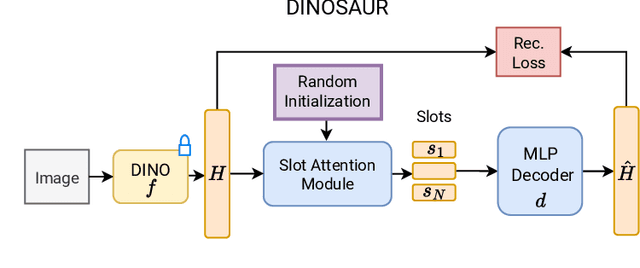
Object-centric representation learning aims to decompose visual scenes into fixed-size vectors called "slots" or "object files", where each slot captures a distinct object. Current state-of-the-art object-centric models have shown remarkable success in object discovery in diverse domains, including complex real-world scenes. However, these models suffer from a key limitation: they lack controllability. Specifically, current object-centric models learn representations based on their preconceived understanding of objects, without allowing user input to guide which objects are represented. Introducing controllability into object-centric models could unlock a range of useful capabilities, such as the ability to extract instance-specific representations from a scene. In this work, we propose a novel approach for user-directed control over slot representations by conditioning slots on language descriptions. The proposed ConTRoLlable Object-centric representation learning approach, which we term CTRL-O, achieves targeted object-language binding in complex real-world scenes without requiring mask supervision. Next, we apply these controllable slot representations on two downstream vision language tasks: text-to-image generation and visual question answering. The proposed approach enables instance-specific text-to-image generation and also achieves strong performance on visual question answering.
Object-Centric Temporal Consistency via Conditional Autoregressive Inductive Biases
Oct 21, 2024



Unsupervised object-centric learning from videos is a promising approach towards learning compositional representations that can be applied to various downstream tasks, such as prediction and reasoning. Recently, it was shown that pretrained Vision Transformers (ViTs) can be useful to learn object-centric representations on real-world video datasets. However, while these approaches succeed at extracting objects from the scenes, the slot-based representations fail to maintain temporal consistency across consecutive frames in a video, i.e. the mapping of objects to slots changes across the video. To address this, we introduce Conditional Autoregressive Slot Attention (CA-SA), a framework that enhances the temporal consistency of extracted object-centric representations in video-centric vision tasks. Leveraging an autoregressive prior network to condition representations on previous timesteps and a novel consistency loss function, CA-SA predicts future slot representations and imposes consistency across frames. We present qualitative and quantitative results showing that our proposed method outperforms the considered baselines on downstream tasks, such as video prediction and visual question-answering tasks.
Automated Discovery of Pairwise Interactions from Unstructured Data
Sep 11, 2024



Pairwise interactions between perturbations to a system can provide evidence for the causal dependencies of the underlying underlying mechanisms of a system. When observations are low dimensional, hand crafted measurements, detecting interactions amounts to simple statistical tests, but it is not obvious how to detect interactions between perturbations affecting latent variables. We derive two interaction tests that are based on pairwise interventions, and show how these tests can be integrated into an active learning pipeline to efficiently discover pairwise interactions between perturbations. We illustrate the value of these tests in the context of biology, where pairwise perturbation experiments are frequently used to reveal interactions that are not observable from any single perturbation. Our tests can be run on unstructured data, such as the pixels in an image, which enables a more general notion of interaction than typical cell viability experiments, and can be run on cheaper experimental assays. We validate on several synthetic and real biological experiments that our tests are able to identify interacting pairs effectively. We evaluate our approach on a real biological experiment where we knocked out 50 pairs of genes and measured the effect with microscopy images. We show that we are able to recover significantly more known biological interactions than random search and standard active learning baselines.
Zero-Shot Object-Centric Representation Learning
Aug 17, 2024



The goal of object-centric representation learning is to decompose visual scenes into a structured representation that isolates the entities. Recent successes have shown that object-centric representation learning can be scaled to real-world scenes by utilizing pre-trained self-supervised features. However, so far, object-centric methods have mostly been applied in-distribution, with models trained and evaluated on the same dataset. This is in contrast to the wider trend in machine learning towards general-purpose models directly applicable to unseen data and tasks. Thus, in this work, we study current object-centric methods through the lens of zero-shot generalization by introducing a benchmark comprising eight different synthetic and real-world datasets. We analyze the factors influencing zero-shot performance and find that training on diverse real-world images improves transferability to unseen scenarios. Furthermore, inspired by the success of task-specific fine-tuning in foundation models, we introduce a novel fine-tuning strategy to adapt pre-trained vision encoders for the task of object discovery. We find that the proposed approach results in state-of-the-art performance for unsupervised object discovery, exhibiting strong zero-shot transfer to unseen datasets.
Learning Beyond Pattern Matching? Assaying Mathematical Understanding in LLMs
May 24, 2024We are beginning to see progress in language model assisted scientific discovery. Motivated by the use of LLMs as a general scientific assistant, this paper assesses the domain knowledge of LLMs through its understanding of different mathematical skills required to solve problems. In particular, we look at not just what the pre-trained model already knows, but how it learned to learn from information during in-context learning or instruction-tuning through exploiting the complex knowledge structure within mathematics. Motivated by the Neural Tangent Kernel (NTK), we propose \textit{NTKEval} to assess changes in LLM's probability distribution via training on different kinds of math data. Our systematic analysis finds evidence of domain understanding during in-context learning. By contrast, certain instruction-tuning leads to similar performance changes irrespective of training on different data, suggesting a lack of domain understanding across different skills.
Metacognitive Capabilities of LLMs: An Exploration in Mathematical Problem Solving
May 20, 2024



Metacognitive knowledge refers to humans' intuitive knowledge of their own thinking and reasoning processes. Today's best LLMs clearly possess some reasoning processes. The paper gives evidence that they also have metacognitive knowledge, including ability to name skills and procedures to apply given a task. We explore this primarily in context of math reasoning, developing a prompt-guided interaction procedure to get a powerful LLM to assign sensible skill labels to math questions, followed by having it perform semantic clustering to obtain coarser families of skill labels. These coarse skill labels look interpretable to humans. To validate that these skill labels are meaningful and relevant to the LLM's reasoning processes we perform the following experiments. (a) We ask GPT-4 to assign skill labels to training questions in math datasets GSM8K and MATH. (b) When using an LLM to solve the test questions, we present it with the full list of skill labels and ask it to identify the skill needed. Then it is presented with randomly selected exemplar solved questions associated with that skill label. This improves accuracy on GSM8k and MATH for several strong LLMs, including code-assisted models. The methodology presented is domain-agnostic, even though this article applies it to math problems.
Cycle Consistency Driven Object Discovery
Jun 03, 2023



Developing deep learning models that effectively learn object-centric representations, akin to human cognition, remains a challenging task. Existing approaches have explored slot-based methods utilizing architectural priors or auxiliary information such as depth maps or flow maps to facilitate object discovery by representing objects as fixed-size vectors, called ``slots'' or ``object files''. However, reliance on architectural priors introduces unreliability and requires meticulous engineering to identify the correct objects. Likewise, methods relying on auxiliary information are suboptimal as such information is often unavailable for most natural scenes. To address these limitations, we propose a method that explicitly optimizes the constraint that each object in a scene should be mapped to a distinct slot. We formalize this constraint by introducing consistency objectives which are cyclic in nature. We refer to them as the \textit{cycle-consistency} objectives. By applying these consistency objectives to various existing slot-based object-centric methods, we demonstrate significant enhancements in object-discovery performance. These improvements are consistent across both synthetic and real-world scenes, highlighting the effectiveness and generalizability of the proposed approach. Furthermore, our experiments show that the learned slots from the proposed method exhibit superior suitability for downstream reinforcement learning (RL) tasks.
Representation Learning in Deep RL via Discrete Information Bottleneck
Dec 28, 2022
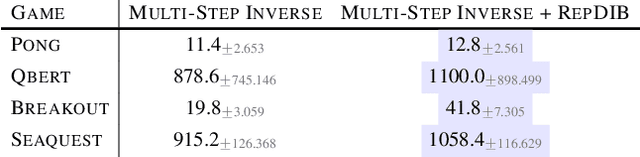

Several self-supervised representation learning methods have been proposed for reinforcement learning (RL) with rich observations. For real-world applications of RL, recovering underlying latent states is crucial, particularly when sensory inputs contain irrelevant and exogenous information. In this work, we study how information bottlenecks can be used to construct latent states efficiently in the presence of task-irrelevant information. We propose architectures that utilize variational and discrete information bottlenecks, coined as RepDIB, to learn structured factorized representations. Exploiting the expressiveness bought by factorized representations, we introduce a simple, yet effective, bottleneck that can be integrated with any existing self-supervised objective for RL. We demonstrate this across several online and offline RL benchmarks, along with a real robot arm task, where we find that compressed representations with RepDIB can lead to strong performance improvements, as the learned bottlenecks help predict only the relevant state while ignoring irrelevant information.
Agent-Controller Representations: Principled Offline RL with Rich Exogenous Information
Oct 31, 2022Learning to control an agent from data collected offline in a rich pixel-based visual observation space is vital for real-world applications of reinforcement learning (RL). A major challenge in this setting is the presence of input information that is hard to model and irrelevant to controlling the agent. This problem has been approached by the theoretical RL community through the lens of exogenous information, i.e, any control-irrelevant information contained in observations. For example, a robot navigating in busy streets needs to ignore irrelevant information, such as other people walking in the background, textures of objects, or birds in the sky. In this paper, we focus on the setting with visually detailed exogenous information, and introduce new offline RL benchmarks offering the ability to study this problem. We find that contemporary representation learning techniques can fail on datasets where the noise is a complex and time dependent process, which is prevalent in practical applications. To address these, we propose to use multi-step inverse models, which have seen a great deal of interest in the RL theory community, to learn Agent-Controller Representations for Offline-RL (ACRO). Despite being simple and requiring no reward, we show theoretically and empirically that the representation created by this objective greatly outperforms baselines.