 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMindForge: Empowering Embodied Agents with Theory of Mind for Lifelong Collaborative Learning
Nov 20, 2024



Contemporary embodied agents, such as Voyager in Minecraft, have demonstrated promising capabilities in open-ended individual learning. However, when powered with open large language models (LLMs), these agents often struggle with rudimentary tasks, even when fine-tuned on domain-specific knowledge. Inspired by human cultural learning, we present \collabvoyager, a novel framework that enhances Voyager with lifelong collaborative learning through explicit perspective-taking. \collabvoyager introduces three key innovations: (1) theory of mind representations linking percepts, beliefs, desires, and actions; (2) natural language communication between agents; and (3) semantic memory of task and environment knowledge and episodic memory of collaboration episodes. These advancements enable agents to reason about their and others' mental states, empirically addressing two prevalent failure modes: false beliefs and faulty task executions. In mixed-expertise Minecraft experiments, \collabvoyager agents outperform Voyager counterparts, significantly improving task completion rate by $66.6\% (+39.4\%)$ for collecting one block of dirt and $70.8\% (+20.8\%)$ for collecting one wood block. They exhibit emergent behaviors like knowledge transfer from expert to novice agents and collaborative code correction. \collabvoyager agents also demonstrate the ability to adapt to out-of-distribution tasks by using their previous experiences and beliefs obtained through collaboration. In this open-ended social learning paradigm, \collabvoyager paves the way for the democratic development of embodied AI, where agents learn in deployment from both peer and environmental feedback.
Object-Centric Temporal Consistency via Conditional Autoregressive Inductive Biases
Oct 21, 2024



Unsupervised object-centric learning from videos is a promising approach towards learning compositional representations that can be applied to various downstream tasks, such as prediction and reasoning. Recently, it was shown that pretrained Vision Transformers (ViTs) can be useful to learn object-centric representations on real-world video datasets. However, while these approaches succeed at extracting objects from the scenes, the slot-based representations fail to maintain temporal consistency across consecutive frames in a video, i.e. the mapping of objects to slots changes across the video. To address this, we introduce Conditional Autoregressive Slot Attention (CA-SA), a framework that enhances the temporal consistency of extracted object-centric representations in video-centric vision tasks. Leveraging an autoregressive prior network to condition representations on previous timesteps and a novel consistency loss function, CA-SA predicts future slot representations and imposes consistency across frames. We present qualitative and quantitative results showing that our proposed method outperforms the considered baselines on downstream tasks, such as video prediction and visual question-answering tasks.
Event-Based Eye Tracking. AIS 2024 Challenge Survey
Apr 17, 2024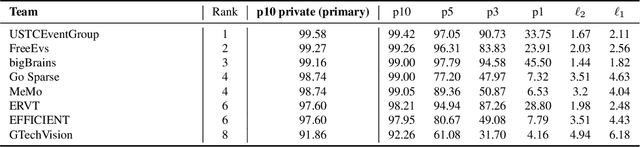
This survey reviews the AIS 2024 Event-Based Eye Tracking (EET) Challenge. The task of the challenge focuses on processing eye movement recorded with event cameras and predicting the pupil center of the eye. The challenge emphasizes efficient eye tracking with event cameras to achieve good task accuracy and efficiency trade-off. During the challenge period, 38 participants registered for the Kaggle competition, and 8 teams submitted a challenge factsheet. The novel and diverse methods from the submitted factsheets are reviewed and analyzed in this survey to advance future event-based eye tracking research.
Extreme Precipitation Nowcasting using Transformer-based Generative Models
Mar 06, 2024



This paper presents an innovative approach to extreme precipitation nowcasting by employing Transformer-based generative models, namely NowcastingGPT with Extreme Value Loss (EVL) regularization. Leveraging a comprehensive dataset from the Royal Netherlands Meteorological Institute (KNMI), our study focuses on predicting short-term precipitation with high accuracy. We introduce a novel method for computing EVL without assuming fixed extreme representations, addressing the limitations of current models in capturing extreme weather events. We present both qualitative and quantitative analyses, demonstrating the superior performance of the proposed NowcastingGPT-EVL in generating accurate precipitation forecasts, especially when dealing with extreme precipitation events. The code is available at \url{https://github.com/Cmeo97/NowcastingGPT}.