 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStructure Enables Effective Self-Localization of Errors in LLMs
Feb 02, 2026Self-correction in language models remains elusive. In this work, we explore whether language models can explicitly localize errors in incorrect reasoning, as a path toward building AI systems that can effectively correct themselves. We introduce a prompting method that structures reasoning as discrete, semantically coherent thought steps, and show that models are able to reliably localize errors within this structure, while failing to do so in conventional, unstructured chain-of-thought reasoning. Motivated by how the human brain monitors errors at discrete decision points and resamples alternatives, we introduce Iterative Correction Sampling of Thoughts (Thought-ICS), a self-correction framework. Thought-ICS iteratively prompts the model to generate reasoning one discrete and complete thought at a time--where each thought represents a deliberate decision by the model--creating natural boundaries for precise error localization. Upon verification, the model localizes the first erroneous step, and the system backtracks to generate alternative reasoning from the last correct point. When asked to correct reasoning verified as incorrect by an oracle, Thought-ICS achieves 20-40% self-correction lift. In a completely autonomous setting without external verification, it outperforms contemporary self-correction baselines.
Imbalanced Gradients in RL Post-Training of Multi-Task LLMs
Oct 22, 2025Multi-task post-training of large language models (LLMs) is typically performed by mixing datasets from different tasks and optimizing them jointly. This approach implicitly assumes that all tasks contribute gradients of similar magnitudes; when this assumption fails, optimization becomes biased toward large-gradient tasks. In this paper, however, we show that this assumption fails in RL post-training: certain tasks produce significantly larger gradients, thus biasing updates toward those tasks. Such gradient imbalance would be justified only if larger gradients implied larger learning gains on the tasks (i.e., larger performance improvements) -- but we find this is not true. Large-gradient tasks can achieve similar or even much lower learning gains than small-gradient ones. Further analyses reveal that these gradient imbalances cannot be explained by typical training statistics such as training rewards or advantages, suggesting that they arise from the inherent differences between tasks. This cautions against naive dataset mixing and calls for future work on principled gradient-level corrections for LLMs.
Internalizing Self-Consistency in Language Models: Multi-Agent Consensus Alignment
Sep 18, 2025



Language Models (LMs) are inconsistent reasoners, often generating contradictory responses to identical prompts. While inference-time methods can mitigate these inconsistencies, they fail to address the core problem: LMs struggle to reliably select reasoning pathways leading to consistent outcomes under exploratory sampling. To address this, we formalize self-consistency as an intrinsic property of well-aligned reasoning models and introduce Multi-Agent Consensus Alignment (MACA), a reinforcement learning framework that post-trains models to favor reasoning trajectories aligned with their internal consensus using majority/minority outcomes from multi-agent debate. These trajectories emerge from deliberative exchanges where agents ground reasoning in peer arguments, not just aggregation of independent attempts, creating richer consensus signals than single-round majority voting. MACA enables agents to teach themselves to be more decisive and concise, and better leverage peer insights in multi-agent settings without external supervision, driving substantial improvements across self-consistency (+27.6% on GSM8K), single-agent reasoning (+23.7% on MATH), sampling-based inference (+22.4% Pass@20 on MATH), and multi-agent ensemble decision-making (+42.7% on MathQA). These findings, coupled with strong generalization to unseen benchmarks (+16.3% on GPQA, +11.6% on CommonsenseQA), demonstrate robust self-alignment that more reliably unlocks latent reasoning potential of language models.
Time After Time: Deep-Q Effect Estimation for Interventions on When and What to do
Mar 20, 2025



Problems in fields such as healthcare, robotics, and finance requires reasoning about the value both of what decision or action to take and when to take it. The prevailing hope is that artificial intelligence will support such decisions by estimating the causal effect of policies such as how to treat patients or how to allocate resources over time. However, existing methods for estimating the effect of a policy struggle with \emph{irregular time}. They either discretize time, or disregard the effect of timing policies. We present a new deep-Q algorithm that estimates the effect of both when and what to do called Earliest Disagreement Q-Evaluation (EDQ). EDQ makes use of recursion for the Q-function that is compatible with flexible sequence models, such as transformers. EDQ provides accurate estimates under standard assumptions. We validate the approach through experiments on survival time and tumor growth tasks.
Aligned Multi Objective Optimization
Feb 19, 2025To date, the multi-objective optimization literature has mainly focused on conflicting objectives, studying the Pareto front, or requiring users to balance tradeoffs. Yet, in machine learning practice, there are many scenarios where such conflict does not take place. Recent findings from multi-task learning, reinforcement learning, and LLMs training show that diverse related tasks can enhance performance across objectives simultaneously. Despite this evidence, such phenomenon has not been examined from an optimization perspective. This leads to a lack of generic gradient-based methods that can scale to scenarios with a large number of related objectives. To address this gap, we introduce the Aligned Multi-Objective Optimization framework, propose new algorithms for this setting, and provide theoretical guarantees of their superior performance compared to naive approaches.
Exploiting Structure in Offline Multi-Agent RL: The Benefits of Low Interaction Rank
Oct 01, 2024
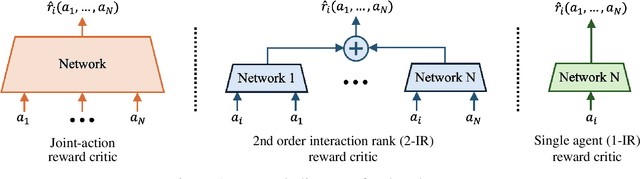
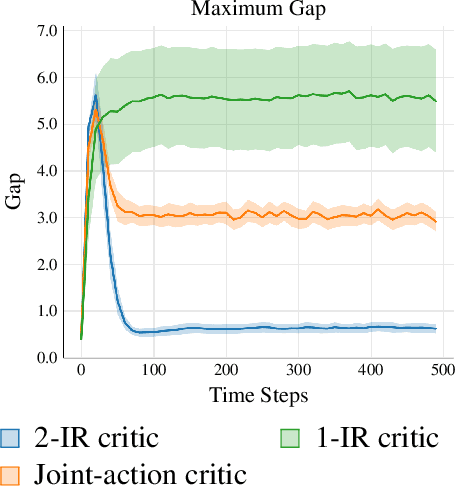

We study the problem of learning an approximate equilibrium in the offline multi-agent reinforcement learning (MARL) setting. We introduce a structural assumption -- the interaction rank -- and establish that functions with low interaction rank are significantly more robust to distribution shift compared to general ones. Leveraging this observation, we demonstrate that utilizing function classes with low interaction rank, when combined with regularization and no-regret learning, admits decentralized, computationally and statistically efficient learning in offline MARL. Our theoretical results are complemented by experiments that showcase the potential of critic architectures with low interaction rank in offline MARL, contrasting with commonly used single-agent value decomposition architectures.
RL in Latent MDPs is Tractable: Online Guarantees via Off-Policy Evaluation
Jun 03, 2024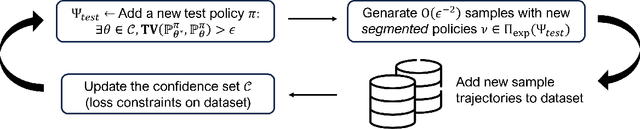
In many real-world decision problems there is partially observed, hidden or latent information that remains fixed throughout an interaction. Such decision problems can be modeled as Latent Markov Decision Processes (LMDPs), where a latent variable is selected at the beginning of an interaction and is not disclosed to the agent. In the last decade, there has been significant progress in solving LMDPs under different structural assumptions. However, for general LMDPs, there is no known learning algorithm that provably matches the existing lower bound~\cite{kwon2021rl}. We introduce the first sample-efficient algorithm for LMDPs without any additional structural assumptions. Our result builds off a new perspective on the role of off-policy evaluation guarantees and coverage coefficients in LMDPs, a perspective, that has been overlooked in the context of exploration in partially observed environments. Specifically, we establish a novel off-policy evaluation lemma and introduce a new coverage coefficient for LMDPs. Then, we show how these can be used to derive near-optimal guarantees of an optimistic exploration algorithm. These results, we believe, can be valuable for a wide range of interactive learning problems beyond LMDPs, and especially, for partially observed environments.
Generalizing Multi-Step Inverse Models for Representation Learning to Finite-Memory POMDPs
Apr 22, 2024Discovering an informative, or agent-centric, state representation that encodes only the relevant information while discarding the irrelevant is a key challenge towards scaling reinforcement learning algorithms and efficiently applying them to downstream tasks. Prior works studied this problem in high-dimensional Markovian environments, when the current observation may be a complex object but is sufficient to decode the informative state. In this work, we consider the problem of discovering the agent-centric state in the more challenging high-dimensional non-Markovian setting, when the state can be decoded from a sequence of past observations. We establish that generalized inverse models can be adapted for learning agent-centric state representation for this task. Our results include asymptotic theory in the deterministic dynamics setting as well as counter-examples for alternative intuitive algorithms. We complement these findings with a thorough empirical study on the agent-centric state discovery abilities of the different alternatives we put forward. Particularly notable is our analysis of past actions, where we show that these can be a double-edged sword: making the algorithms more successful when used correctly and causing dramatic failure when used incorrectly.
The Bias of Harmful Label Associations in Vision-Language Models
Feb 11, 2024Despite the remarkable performance of foundation vision-language models, the shared representation space for text and vision can also encode harmful label associations detrimental to fairness. While prior work has uncovered bias in vision-language models' (VLMs) classification performance across geography, work has been limited along the important axis of harmful label associations due to a lack of rich, labeled data. In this work, we investigate harmful label associations in the recently released Casual Conversations datasets containing more than 70,000 videos. We study bias in the frequency of harmful label associations across self-provided labels for age, gender, apparent skin tone, and physical adornments across several leading VLMs. We find that VLMs are $4-13$x more likely to harmfully classify individuals with darker skin tones. We also find scaling transformer encoder model size leads to higher confidence in harmful predictions. Finally, we find improvements on standard vision tasks across VLMs does not address disparities in harmful label associations.
Pearl: A Production-ready Reinforcement Learning Agent
Dec 06, 2023



Reinforcement Learning (RL) offers a versatile framework for achieving long-term goals. Its generality allows us to formalize a wide range of problems that real-world intelligent systems encounter, such as dealing with delayed rewards, handling partial observability, addressing the exploration and exploitation dilemma, utilizing offline data to improve online performance, and ensuring safety constraints are met. Despite considerable progress made by the RL research community in addressing these issues, existing open-source RL libraries tend to focus on a narrow portion of the RL solution pipeline, leaving other aspects largely unattended. This paper introduces Pearl, a Production-ready RL agent software package explicitly designed to embrace these challenges in a modular fashion. In addition to presenting preliminary benchmark results, this paper highlights Pearl's industry adoptions to demonstrate its readiness for production usage. Pearl is open sourced on Github at github.com/facebookresearch/pearl and its official website is located at pearlagent.github.io.