 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePcLast: Discovering Plannable Continuous Latent States
Nov 06, 2023



Goal-conditioned planning benefits from learned low-dimensional representations of rich, high-dimensional observations. While compact latent representations, typically learned from variational autoencoders or inverse dynamics, enable goal-conditioned planning they ignore state affordances, thus hampering their sample-efficient planning capabilities. In this paper, we learn a representation that associates reachable states together for effective onward planning. We first learn a latent representation with multi-step inverse dynamics (to remove distracting information); and then transform this representation to associate reachable states together in $\ell_2$ space. Our proposals are rigorously tested in various simulation testbeds. Numerical results in reward-based and reward-free settings show significant improvements in sampling efficiency, and yields layered state abstractions that enable computationally efficient hierarchical planning.
Guaranteed Discovery of Controllable Latent States with Multi-Step Inverse Models
Jul 17, 2022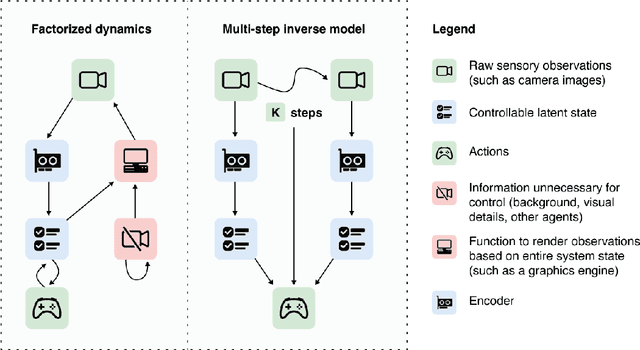
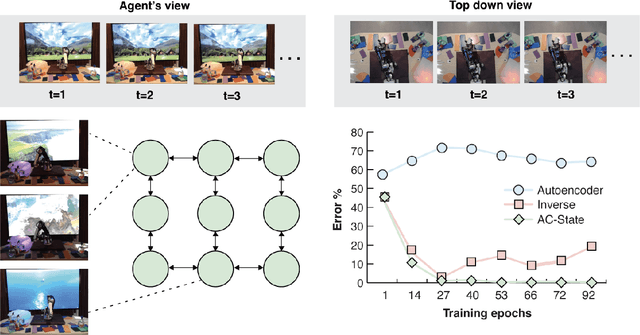
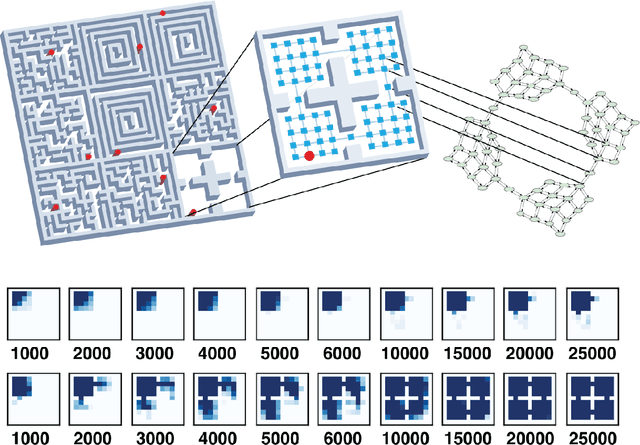
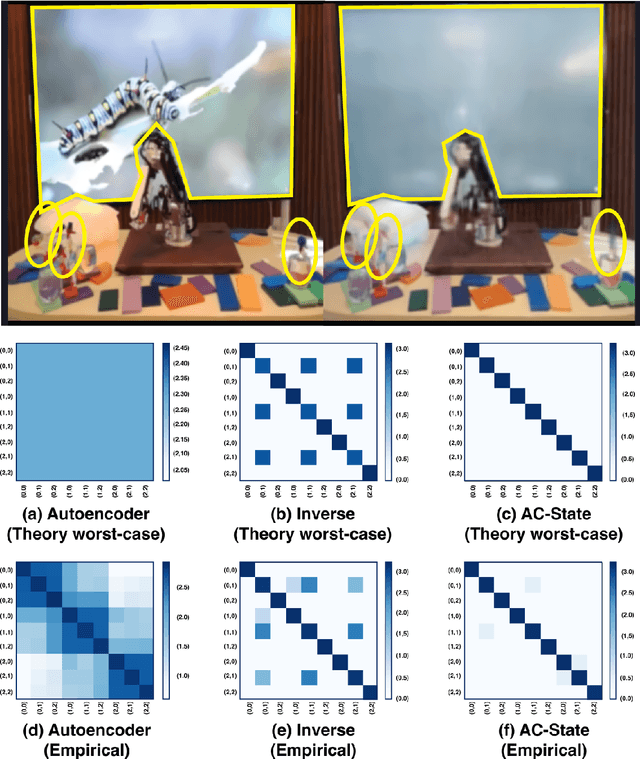
A person walking along a city street who tries to model all aspects of the world would quickly be overwhelmed by a multitude of shops, cars, and people moving in and out of view, following their own complex and inscrutable dynamics. Exploration and navigation in such an environment is an everyday task, requiring no vast exertion of mental resources. Is it possible to turn this fire hose of sensory information into a minimal latent state which is necessary and sufficient for an agent to successfully act in the world? We formulate this question concretely, and propose the Agent-Controllable State Discovery algorithm (AC-State), which has theoretical guarantees and is practically demonstrated to discover the \textit{minimal controllable latent state} which contains all of the information necessary for controlling the agent, while fully discarding all irrelevant information. This algorithm consists of a multi-step inverse model (predicting actions from distant observations) with an information bottleneck. AC-State enables localization, exploration, and navigation without reward or demonstrations. We demonstrate the discovery of controllable latent state in three domains: localizing a robot arm with distractions (e.g., changing lighting conditions and background), exploring in a maze alongside other agents, and navigating in the Matterport house simulator.
Resonance: Replacing Software Constants with Context-Aware Models in Real-time Communication
Nov 23, 2020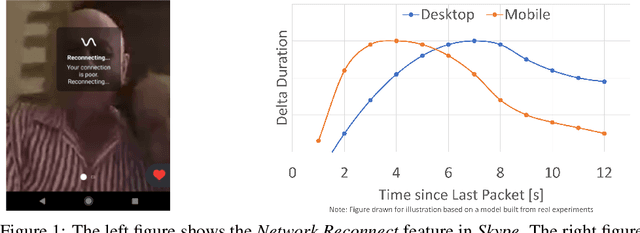
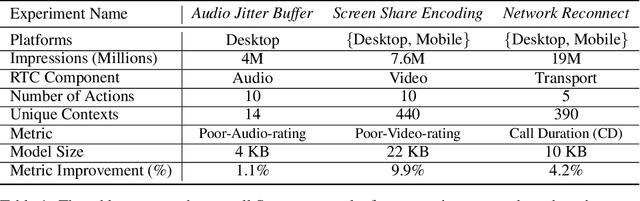
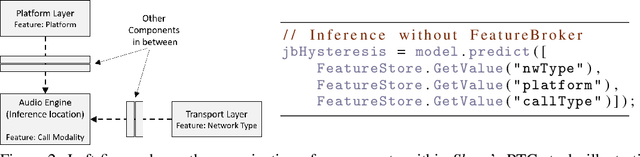
Large software systems tune hundreds of 'constants' to optimize their runtime performance. These values are commonly derived through intuition, lab tests, or A/B tests. A 'one-size-fits-all' approach is often sub-optimal as the best value depends on runtime context. In this paper, we provide an experimental approach to replace constants with learned contextual functions for Skype - a widely used real-time communication (RTC) application. We present Resonance, a system based on contextual bandits (CB). We describe experiences from three real-world experiments: applying it to the audio, video, and transport components in Skype. We surface a unique and practical challenge of performing machine learning (ML) inference in large software systems written using encapsulation principles. Finally, we open-source FeatureBroker, a library to reduce the friction in adopting ML models in such development environments
Efficient Contextual Bandits with Continuous Actions
Jun 10, 2020
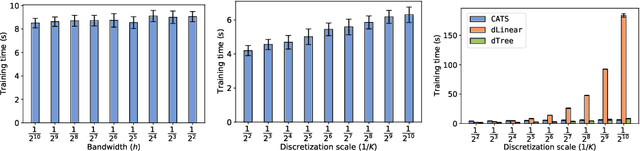
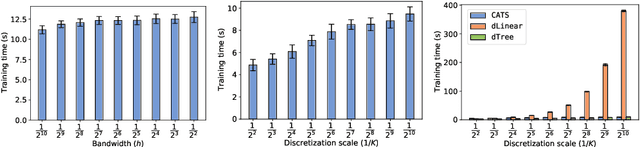
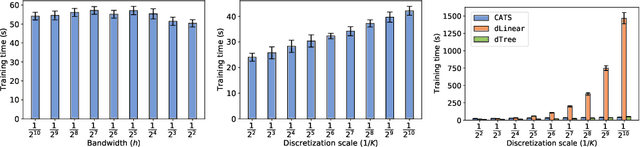
We create a computationally tractable algorithm for contextual bandits with continuous actions having unknown structure. Our reduction-style algorithm composes with most supervised learning representations. We prove that it works in a general sense and verify the new functionality with large-scale experiments.