 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVLMPlanner: Integrating Visual Language Models with Motion Planning
Jul 27, 2025Integrating large language models (LLMs) into autonomous driving motion planning has recently emerged as a promising direction, offering enhanced interpretability, better controllability, and improved generalization in rare and long-tail scenarios. However, existing methods often rely on abstracted perception or map-based inputs, missing crucial visual context, such as fine-grained road cues, accident aftermath, or unexpected obstacles, which are essential for robust decision-making in complex driving environments. To bridge this gap, we propose VLMPlanner, a hybrid framework that combines a learning-based real-time planner with a vision-language model (VLM) capable of reasoning over raw images. The VLM processes multi-view images to capture rich, detailed visual information and leverages its common-sense reasoning capabilities to guide the real-time planner in generating robust and safe trajectories. Furthermore, we develop the Context-Adaptive Inference Gate (CAI-Gate) mechanism that enables the VLM to mimic human driving behavior by dynamically adjusting its inference frequency based on scene complexity, thereby achieving an optimal balance between planning performance and computational efficiency. We evaluate our approach on the large-scale, challenging nuPlan benchmark, with comprehensive experimental results demonstrating superior planning performance in scenarios with intricate road conditions and dynamic elements. Code will be available.
Position: Intelligent Science Laboratory Requires the Integration of Cognitive and Embodied AI
Jun 24, 2025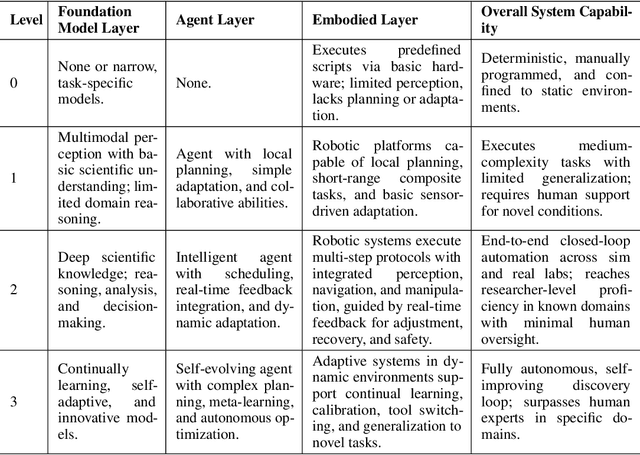
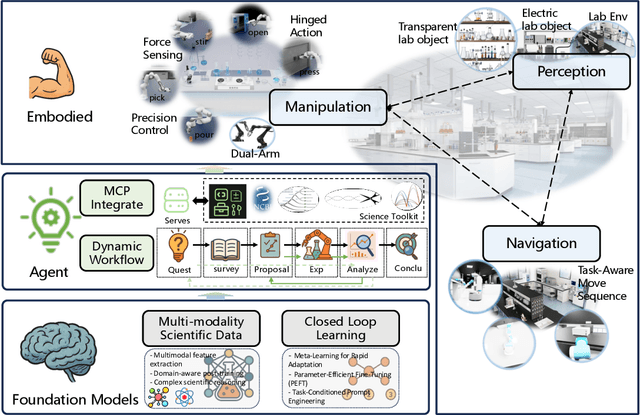
Scientific discovery has long been constrained by human limitations in expertise, physical capability, and sleep cycles. The recent rise of AI scientists and automated laboratories has accelerated both the cognitive and operational aspects of research. However, key limitations persist: AI systems are often confined to virtual environments, while automated laboratories lack the flexibility and autonomy to adaptively test new hypotheses in the physical world. Recent advances in embodied AI, such as generalist robot foundation models, diffusion-based action policies, fine-grained manipulation learning, and sim-to-real transfer, highlight the promise of integrating cognitive and embodied intelligence. This convergence opens the door to closed-loop systems that support iterative, autonomous experimentation and the possibility of serendipitous discovery. In this position paper, we propose the paradigm of Intelligent Science Laboratories (ISLs): a multi-layered, closed-loop framework that deeply integrates cognitive and embodied intelligence. ISLs unify foundation models for scientific reasoning, agent-based workflow orchestration, and embodied agents for robust physical experimentation. We argue that such systems are essential for overcoming the current limitations of scientific discovery and for realizing the full transformative potential of AI-driven science.
LabUtopia: High-Fidelity Simulation and Hierarchical Benchmark for Scientific Embodied Agents
May 28, 2025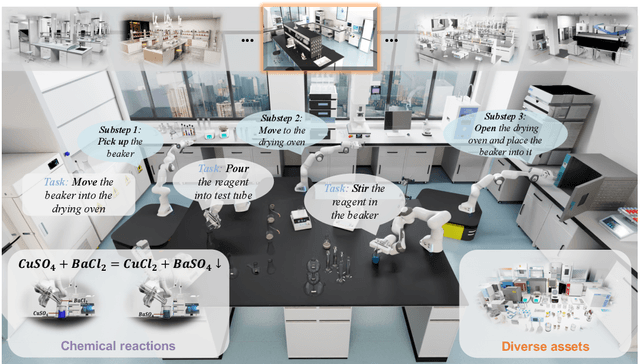
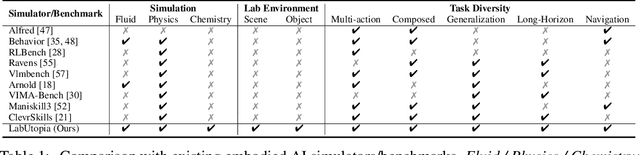
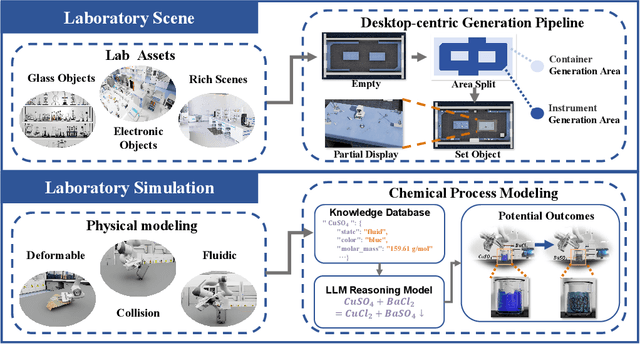
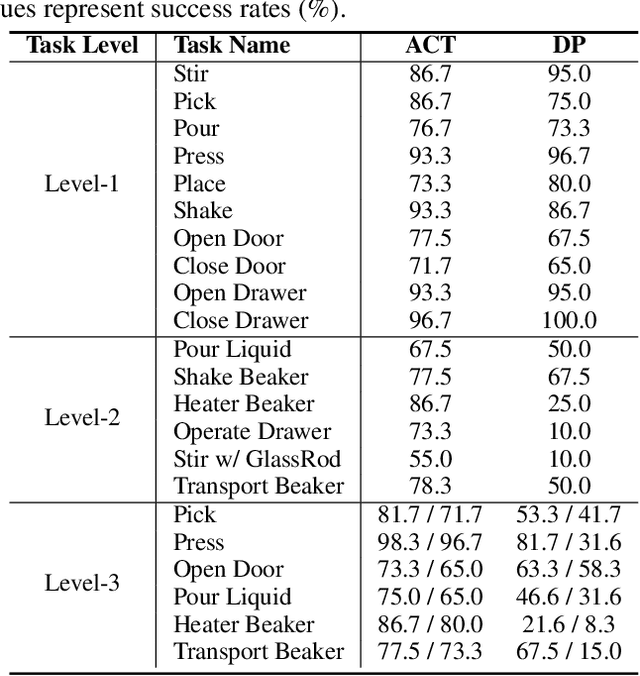
Scientific embodied agents play a crucial role in modern laboratories by automating complex experimental workflows. Compared to typical household environments, laboratory settings impose significantly higher demands on perception of physical-chemical transformations and long-horizon planning, making them an ideal testbed for advancing embodied intelligence. However, its development has been long hampered by the lack of suitable simulator and benchmarks. In this paper, we address this gap by introducing LabUtopia, a comprehensive simulation and benchmarking suite designed to facilitate the development of generalizable, reasoning-capable embodied agents in laboratory settings. Specifically, it integrates i) LabSim, a high-fidelity simulator supporting multi-physics and chemically meaningful interactions; ii) LabScene, a scalable procedural generator for diverse scientific scenes; and iii) LabBench, a hierarchical benchmark spanning five levels of complexity from atomic actions to long-horizon mobile manipulation. LabUtopia supports 30 distinct tasks and includes more than 200 scene and instrument assets, enabling large-scale training and principled evaluation in high-complexity environments. We demonstrate that LabUtopia offers a powerful platform for advancing the integration of perception, planning, and control in scientific-purpose agents and provides a rigorous testbed for exploring the practical capabilities and generalization limits of embodied intelligence in future research.
Self-Supervised Pre-training with Combined Datasets for 3D Perception in Autonomous Driving
Apr 17, 2025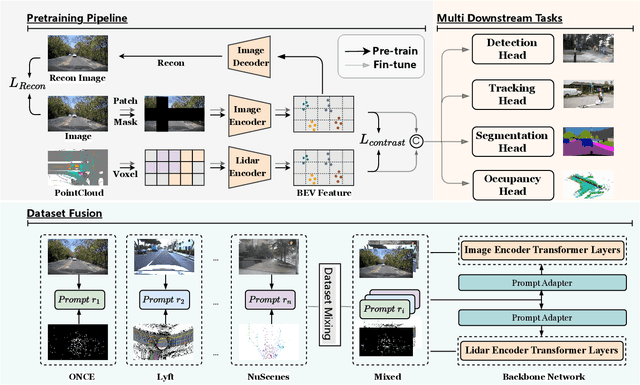

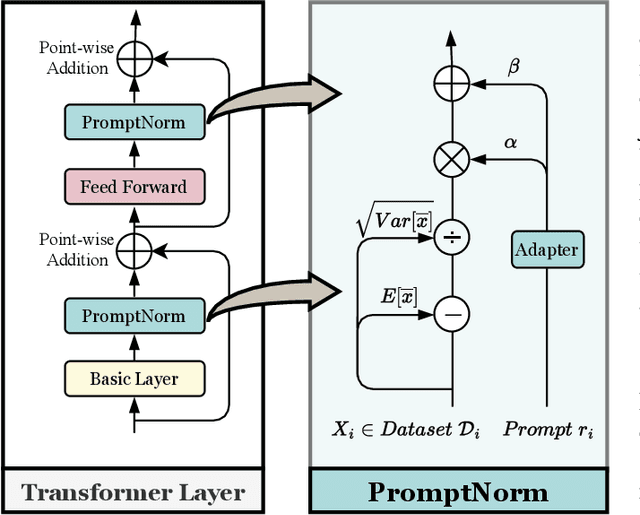
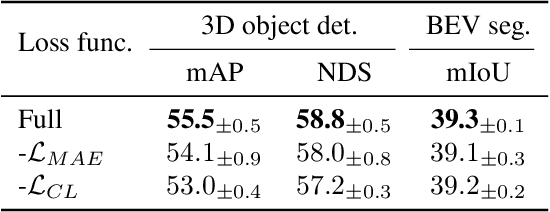
The significant achievements of pre-trained models leveraging large volumes of data in the field of NLP and 2D vision inspire us to explore the potential of extensive data pre-training for 3D perception in autonomous driving. Toward this goal, this paper proposes to utilize massive unlabeled data from heterogeneous datasets to pre-train 3D perception models. We introduce a self-supervised pre-training framework that learns effective 3D representations from scratch on unlabeled data, combined with a prompt adapter based domain adaptation strategy to reduce dataset bias. The approach significantly improves model performance on downstream tasks such as 3D object detection, BEV segmentation, 3D object tracking, and occupancy prediction, and shows steady performance increase as the training data volume scales up, demonstrating the potential of continually benefit 3D perception models for autonomous driving. We will release the source code to inspire further investigations in the community.
LFP: Efficient and Accurate End-to-End Lane-Level Planning via Camera-LiDAR Fusion
Sep 21, 2024



Multi-modal systems enhance performance in autonomous driving but face inefficiencies due to indiscriminate processing within each modality. Additionally, the independent feature learning of each modality lacks interaction, which results in extracted features that do not possess the complementary characteristics. These issue increases the cost of fusing redundant information across modalities. To address these challenges, we propose targeting driving-relevant elements, which reduces the volume of LiDAR features while preserving critical information. This approach enhances lane level interaction between the image and LiDAR branches, allowing for the extraction and fusion of their respective advantageous features. Building upon the camera-only framework PHP, we introduce the Lane-level camera-LiDAR Fusion Planning (LFP) method, which balances efficiency with performance by using lanes as the unit for sensor fusion. Specifically, we design three modules to enhance efficiency and performance. For efficiency, we propose an image-guided coarse lane prior generation module that forecasts the region of interest (ROI) for lanes and assigns a confidence score, guiding LiDAR processing. The LiDAR feature extraction modules leverages lane-aware priors from the image branch to guide sampling for pillar, retaining essential pillars. For performance, the lane-level cross-modal query integration and feature enhancement module uses confidence score from ROI to combine low-confidence image queries with LiDAR queries, extracting complementary depth features. These features enhance the low-confidence image features, compensating for the lack of depth. Experiments on the Carla benchmarks show that our method achieves state-of-the-art performance in both driving score and infraction score, with maximum improvement of 15% and 14% over existing algorithms, respectively, maintaining high frame rate of 19.27 FPS.
Perception Helps Planning: Facilitating Multi-Stage Lane-Level Integration via Double-Edge Structures
Jul 16, 2024



When planning for autonomous driving, it is crucial to consider essential traffic elements such as lanes, intersections, traffic regulations, and dynamic agents. However, they are often overlooked by the traditional end-to-end planning methods, likely leading to inefficiencies and non-compliance with traffic regulations. In this work, we endeavor to integrate the perception of these elements into the planning task. To this end, we propose Perception Helps Planning (PHP), a novel framework that reconciles lane-level planning with perception. This integration ensures that planning is inherently aligned with traffic constraints, thus facilitating safe and efficient driving. Specifically, PHP focuses on both edges of a lane for planning and perception purposes, taking into consideration the 3D positions of both lane edges and attributes for lane intersections, lane directions, lane occupancy, and planning. In the algorithmic design, the process begins with the transformer encoding multi-camera images to extract the above features and predicting lane-level perception results. Next, the hierarchical feature early fusion module refines the features for predicting planning attributes. Finally, the double-edge interpreter utilizes a late-fusion process specifically designed to integrate lane-level perception and planning information, culminating in the generation of vehicle control signals. Experiments on three Carla benchmarks show significant improvements in driving score of 27.20%, 33.47%, and 15.54% over existing algorithms, respectively, achieving the state-of-the-art performance, with the system operating up to 22.57 FPS.
HVDistill: Transferring Knowledge from Images to Point Clouds via Unsupervised Hybrid-View Distillation
Mar 18, 2024We present a hybrid-view-based knowledge distillation framework, termed HVDistill, to guide the feature learning of a point cloud neural network with a pre-trained image network in an unsupervised manner. By exploiting the geometric relationship between RGB cameras and LiDAR sensors, the correspondence between the two modalities based on both image-plane view and bird-eye view can be established, which facilitates representation learning. Specifically, the image-plane correspondences can be simply obtained by projecting the point clouds, while the bird-eye-view correspondences can be achieved by lifting pixels to the 3D space with the predicted depths under the supervision of projected point clouds. The image teacher networks provide rich semantics from the image-plane view and meanwhile acquire geometric information from the bird-eye view. Indeed, image features from the two views naturally complement each other and together can ameliorate the learned feature representation of the point cloud student networks. Moreover, with a self-supervised pre-trained 2D network, HVDistill requires neither 2D nor 3D annotations. We pre-train our model on nuScenes dataset and transfer it to several downstream tasks on nuScenes, SemanticKITTI, and KITTI datasets for evaluation. Extensive experimental results show that our method achieves consistent improvements over the baseline trained from scratch and significantly outperforms the existing schemes. Codes are available at git@github.com:zhangsha1024/HVDistill.git.
Agent3D-Zero: An Agent for Zero-shot 3D Understanding
Mar 18, 2024
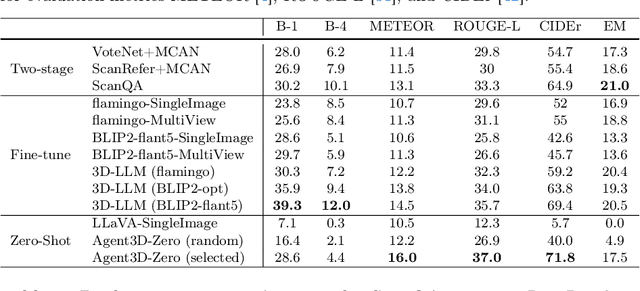


The ability to understand and reason the 3D real world is a crucial milestone towards artificial general intelligence. The current common practice is to finetune Large Language Models (LLMs) with 3D data and texts to enable 3D understanding. Despite their effectiveness, these approaches are inherently limited by the scale and diversity of the available 3D data. Alternatively, in this work, we introduce Agent3D-Zero, an innovative 3D-aware agent framework addressing the 3D scene understanding in a zero-shot manner. The essence of our approach centers on reconceptualizing the challenge of 3D scene perception as a process of understanding and synthesizing insights from multiple images, inspired by how our human beings attempt to understand 3D scenes. By consolidating this idea, we propose a novel way to make use of a Large Visual Language Model (VLM) via actively selecting and analyzing a series of viewpoints for 3D understanding. Specifically, given an input 3D scene, Agent3D-Zero first processes a bird's-eye view image with custom-designed visual prompts, then iteratively chooses the next viewpoints to observe and summarize the underlying knowledge. A distinctive advantage of Agent3D-Zero is the introduction of novel visual prompts, which significantly unleash the VLMs' ability to identify the most informative viewpoints and thus facilitate observing 3D scenes. Extensive experiments demonstrate the effectiveness of the proposed framework in understanding diverse and previously unseen 3D environments.
PoIFusion: Multi-Modal 3D Object Detection via Fusion at Points of Interest
Mar 14, 2024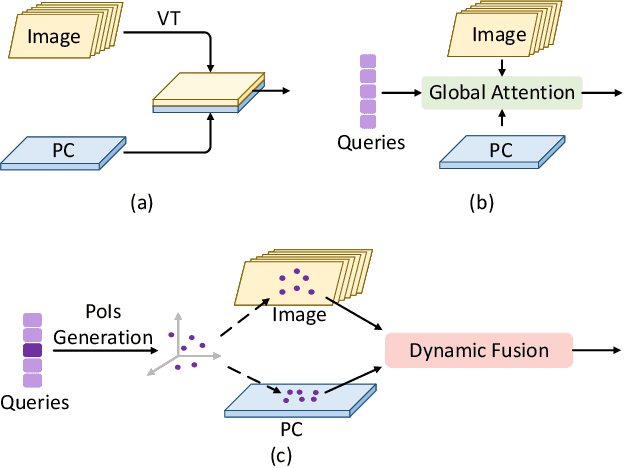
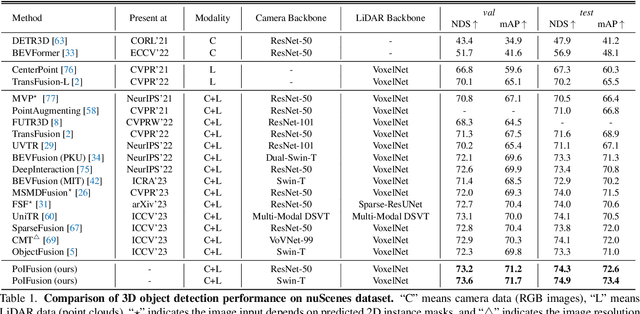
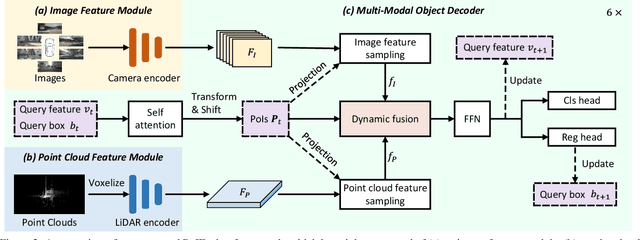
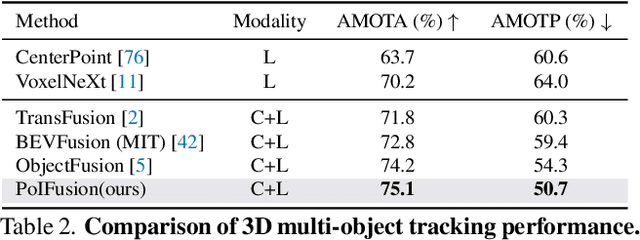
In this work, we present PoIFusion, a simple yet effective multi-modal 3D object detection framework to fuse the information of RGB images and LiDAR point clouds at the point of interest (abbreviated as PoI). Technically, our PoIFusion follows the paradigm of query-based object detection, formulating object queries as dynamic 3D boxes. The PoIs are adaptively generated from each query box on the fly, serving as the keypoints to represent a 3D object and play the role of basic units in multi-modal fusion. Specifically, we project PoIs into the view of each modality to sample the corresponding feature and integrate the multi-modal features at each PoI through a dynamic fusion block. Furthermore, the features of PoIs derived from the same query box are aggregated together to update the query feature. Our approach prevents information loss caused by view transformation and eliminates the computation-intensive global attention, making the multi-modal 3D object detector more applicable. We conducted extensive experiments on the nuScenes dataset to evaluate our approach. Remarkably, our PoIFusion achieves 74.9\% NDS and 73.4\% mAP, setting a state-of-the-art record on the multi-modal 3D object detection benchmark. Codes will be made available via \url{https://djiajunustc.github.io/projects/poifusion}.
PonderV2: Pave the Way for 3D Foundation Model with A Universal Pre-training Paradigm
Oct 13, 2023
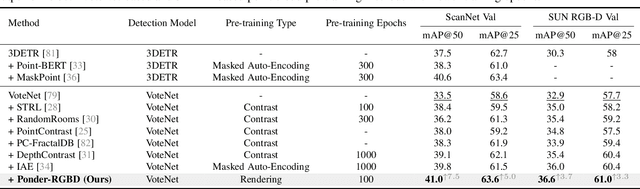
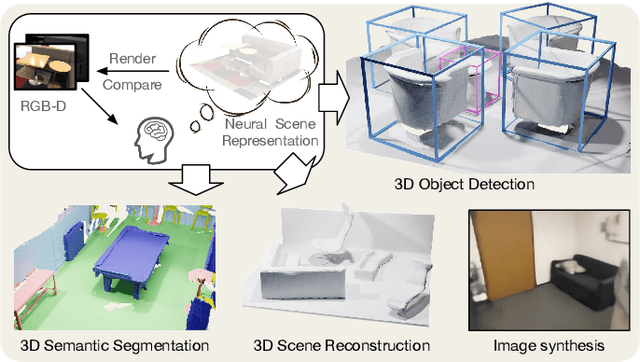
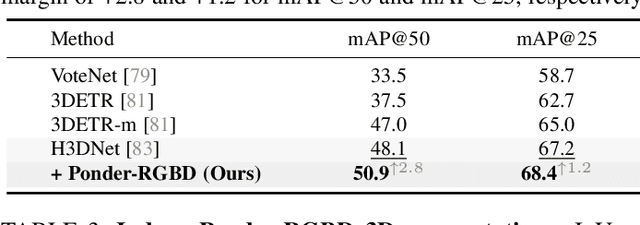
In contrast to numerous NLP and 2D computer vision foundational models, the learning of a robust and highly generalized 3D foundational model poses considerably greater challenges. This is primarily due to the inherent data variability and the diversity of downstream tasks. In this paper, we introduce a comprehensive 3D pre-training framework designed to facilitate the acquisition of efficient 3D representations, thereby establishing a pathway to 3D foundational models. Motivated by the fact that informative 3D features should be able to encode rich geometry and appearance cues that can be utilized to render realistic images, we propose a novel universal paradigm to learn point cloud representations by differentiable neural rendering, serving as a bridge between 3D and 2D worlds. We train a point cloud encoder within a devised volumetric neural renderer by comparing the rendered images with the real images. Notably, our approach demonstrates the seamless integration of the learned 3D encoder into diverse downstream tasks. These tasks encompass not only high-level challenges such as 3D detection and segmentation but also low-level objectives like 3D reconstruction and image synthesis, spanning both indoor and outdoor scenarios. Besides, we also illustrate the capability of pre-training a 2D backbone using the proposed universal methodology, surpassing conventional pre-training methods by a large margin. For the first time, PonderV2 achieves state-of-the-art performance on 11 indoor and outdoor benchmarks. The consistent improvements in various settings imply the effectiveness of the proposed method. Code and models will be made available at https://github.com/OpenGVLab/PonderV2.