 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Surgical Robotic Manipulation with 3D Spatial Priors
Mar 04, 2026Achieving 3D spatial awareness is crucial for surgical robotic manipulation, where precise and delicate operations are required. Existing methods either explicitly reconstruct the surgical scene prior to manipulation, or enhance multi-view features by adding wrist-mounted cameras to supplement the default stereo endoscopes. However, both paradigms suffer from notable limitations: the former easily leads to error accumulation and prevents end-to-end optimization due to its multi-stage nature, while the latter is rarely adopted in clinical practice since wrist-mounted cameras can interfere with the motion of surgical robot arms. In this work, we introduce the Spatial Surgical Transformer (SST), an end-to-end visuomotor policy that empowers surgical robots with 3D spatial awareness by directly exploring 3D spatial cues embedded in endoscopic images. First, we build Surgical3D, a large-scale photorealistic dataset containing 30K stereo endoscopic image pairs with accurate 3D geometry, addressing the scarcity of 3D data in surgical scenes. Based on Surgical3D, we finetune a powerful geometric transformer to extract robust 3D latent representations from stereo endoscopes images. These representations are then seamlessly aligned with the robot's action space via a lightweight multi-level spatial feature connector (MSFC), all within an endoscope-centric coordinate frame. Extensive real-robot experiments demonstrate that SST achieves state-of-the-art performance and strong spatial generalization on complex surgical tasks such as knot tying and ex-vivo organ dissection, representing a significant step toward practical clinical deployment. The dataset and code will be released.
PuriLight: A Lightweight Shuffle and Purification Framework for Monocular Depth Estimation
Feb 11, 2026We propose PuriLight, a lightweight and efficient framework for self-supervised monocular depth estimation, to address the dual challenges of computational efficiency and detail preservation. While recent advances in self-supervised depth estimation have reduced reliance on ground truth supervision, existing approaches remain constrained by either bulky architectures compromising practicality or lightweight models sacrificing structural precision. These dual limitations underscore the critical need to develop lightweight yet structurally precise architectures. Our framework addresses these limitations through a three-stage architecture incorporating three novel modules: the Shuffle-Dilation Convolution (SDC) module for local feature extraction, the Rotation-Adaptive Kernel Attention (RAKA) module for hierarchical feature enhancement, and the Deep Frequency Signal Purification (DFSP) module for global feature purification. Through effective collaboration, these modules enable PuriLight to achieve both lightweight and accurate feature extraction and processing. Extensive experiments demonstrate that PuriLight achieves state-of-the-art performance with minimal training parameters while maintaining exceptional computational efficiency. Codes will be available at https://github.com/ishrouder/PuriLight.
VistaDepth: Frequency Modulation With Bias Reweighting For Enhanced Long-Range Depth Estimation
Apr 22, 2025
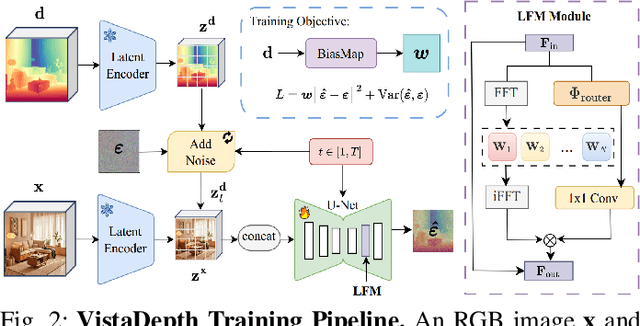
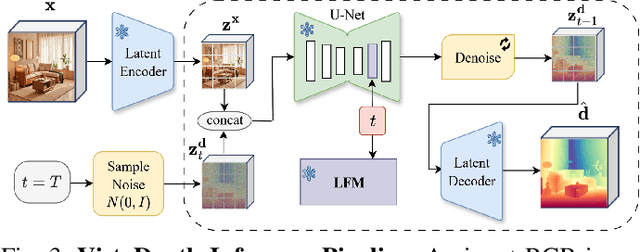
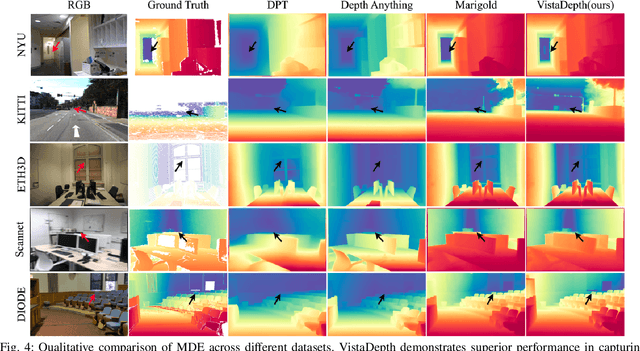
Monocular depth estimation (MDE) aims to predict per-pixel depth values from a single RGB image. Recent advancements have positioned diffusion models as effective MDE tools by framing the challenge as a conditional image generation task. Despite their progress, these methods often struggle with accurately reconstructing distant depths, due largely to the imbalanced distribution of depth values and an over-reliance on spatial-domain features. To overcome these limitations, we introduce VistaDepth, a novel framework that integrates adaptive frequency-domain feature enhancements with an adaptive weight-balancing mechanism into the diffusion process. Central to our approach is the Latent Frequency Modulation (LFM) module, which dynamically refines spectral responses in the latent feature space, thereby improving the preservation of structural details and reducing noisy artifacts. Furthermore, we implement an adaptive weighting strategy that modulates the diffusion loss in real-time, enhancing the model's sensitivity towards distant depth reconstruction. These innovations collectively result in superior depth perception performance across both distance and detail. Experimental evaluations confirm that VistaDepth achieves state-of-the-art performance among diffusion-based MDE techniques, particularly excelling in the accurate reconstruction of distant regions.
GraspCoT: Integrating Physical Property Reasoning for 6-DoF Grasping under Flexible Language Instructions
Mar 20, 2025Flexible instruction-guided 6-DoF grasping is a significant yet challenging task for real-world robotic systems. Existing methods utilize the contextual understanding capabilities of the large language models (LLMs) to establish mappings between expressions and targets, allowing robots to comprehend users' intentions in the instructions. However, the LLM's knowledge about objects' physical properties remains underexplored despite its tight relevance to grasping. In this work, we propose GraspCoT, a 6-DoF grasp detection framework that integrates a Chain-of-Thought (CoT) reasoning mechanism oriented to physical properties, guided by auxiliary question-answering (QA) tasks. Particularly, we design a set of QA templates to enable hierarchical reasoning that includes three stages: target parsing, physical property analysis, and grasp action selection. Moreover, GraspCoT presents a unified multimodal LLM architecture, which encodes multi-view observations of 3D scenes into 3D-aware visual tokens, and then jointly embeds these visual tokens with CoT-derived textual tokens within LLMs to generate grasp pose predictions. Furthermore, we present IntentGrasp, a large-scale benchmark that fills the gap in public datasets for multi-object grasp detection under diverse and indirect verbal commands. Extensive experiments on IntentGrasp demonstrate the superiority of our method, with additional validation in real-world robotic applications confirming its practicality. Codes and data will be released.
S3R-GS: Streamlining the Pipeline for Large-Scale Street Scene Reconstruction
Mar 11, 2025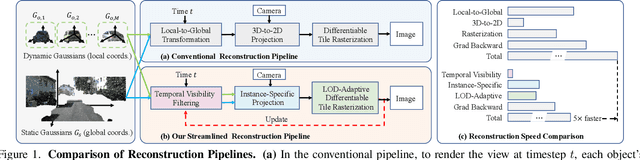



Recently, 3D Gaussian Splatting (3DGS) has reshaped the field of photorealistic 3D reconstruction, achieving impressive rendering quality and speed. However, when applied to large-scale street scenes, existing methods suffer from rapidly escalating per-viewpoint reconstruction costs as scene size increases, leading to significant computational overhead. After revisiting the conventional pipeline, we identify three key factors accounting for this issue: unnecessary local-to-global transformations, excessive 3D-to-2D projections, and inefficient rendering of distant content. To address these challenges, we propose S3R-GS, a 3DGS framework that Streamlines the pipeline for large-scale Street Scene Reconstruction, effectively mitigating these limitations. Moreover, most existing street 3DGS methods rely on ground-truth 3D bounding boxes to separate dynamic and static components, but 3D bounding boxes are difficult to obtain, limiting real-world applicability. To address this, we propose an alternative solution with 2D boxes, which are easier to annotate or can be predicted by off-the-shelf vision foundation models. Such designs together make S3R-GS readily adapt to large, in-the-wild scenarios. Extensive experiments demonstrate that S3R-GS enhances rendering quality and significantly accelerates reconstruction. Remarkably, when applied to videos from the challenging Argoverse2 dataset, it achieves state-of-the-art PSNR and SSIM, reducing reconstruction time to below 50%--and even 20%--of competing methods.
RaCFormer: Towards High-Quality 3D Object Detection via Query-based Radar-Camera Fusion
Dec 17, 2024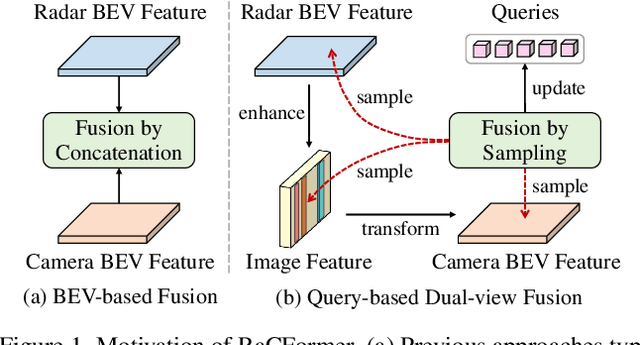
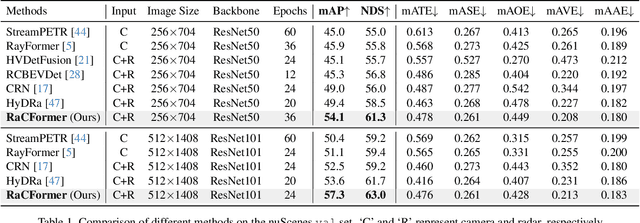
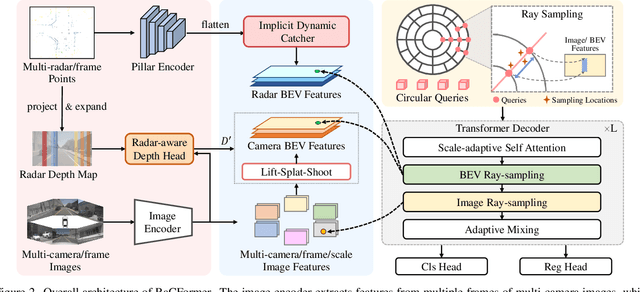
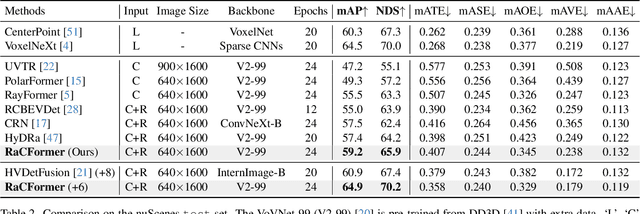
We propose Radar-Camera fusion transformer (RaCFormer) to boost the accuracy of 3D object detection by the following insight. The Radar-Camera fusion in outdoor 3D scene perception is capped by the image-to-BEV transformation--if the depth of pixels is not accurately estimated, the naive combination of BEV features actually integrates unaligned visual content. To avoid this problem, we propose a query-based framework that enables adaptively sample instance-relevant features from both the BEV and the original image view. Furthermore, we enhance system performance by two key designs: optimizing query initialization and strengthening the representational capacity of BEV. For the former, we introduce an adaptive circular distribution in polar coordinates to refine the initialization of object queries, allowing for a distance-based adjustment of query density. For the latter, we initially incorporate a radar-guided depth head to refine the transformation from image view to BEV. Subsequently, we focus on leveraging the Doppler effect of radar and introduce an implicit dynamic catcher to capture the temporal elements within the BEV. Extensive experiments on nuScenes and View-of-Delft (VoD) datasets validate the merits of our design. Remarkably, our method achieves superior results of 64.9% mAP and 70.2% NDS on nuScenes, even outperforming several LiDAR-based detectors. RaCFormer also secures the 1st ranking on the VoD dataset. The code will be released.
CELLmap: Enhancing LiDAR SLAM through Elastic and Lightweight Spherical Map Representation
Sep 29, 2024



SLAM is a fundamental capability of unmanned systems, with LiDAR-based SLAM gaining widespread adoption due to its high precision. Current SLAM systems can achieve centimeter-level accuracy within a short period. However, there are still several challenges when dealing with largescale mapping tasks including significant storage requirements and difficulty of reusing the constructed maps. To address this, we first design an elastic and lightweight map representation called CELLmap, composed of several CELLs, each representing the local map at the corresponding location. Then, we design a general backend including CELL-based bidirectional registration module and loop closure detection module to improve global map consistency. Our experiments have demonstrated that CELLmap can represent the precise geometric structure of large-scale maps of KITTI dataset using only about 60 MB. Additionally, our general backend achieves up to a 26.88% improvement over various LiDAR odometry methods.
LFP: Efficient and Accurate End-to-End Lane-Level Planning via Camera-LiDAR Fusion
Sep 21, 2024



Multi-modal systems enhance performance in autonomous driving but face inefficiencies due to indiscriminate processing within each modality. Additionally, the independent feature learning of each modality lacks interaction, which results in extracted features that do not possess the complementary characteristics. These issue increases the cost of fusing redundant information across modalities. To address these challenges, we propose targeting driving-relevant elements, which reduces the volume of LiDAR features while preserving critical information. This approach enhances lane level interaction between the image and LiDAR branches, allowing for the extraction and fusion of their respective advantageous features. Building upon the camera-only framework PHP, we introduce the Lane-level camera-LiDAR Fusion Planning (LFP) method, which balances efficiency with performance by using lanes as the unit for sensor fusion. Specifically, we design three modules to enhance efficiency and performance. For efficiency, we propose an image-guided coarse lane prior generation module that forecasts the region of interest (ROI) for lanes and assigns a confidence score, guiding LiDAR processing. The LiDAR feature extraction modules leverages lane-aware priors from the image branch to guide sampling for pillar, retaining essential pillars. For performance, the lane-level cross-modal query integration and feature enhancement module uses confidence score from ROI to combine low-confidence image queries with LiDAR queries, extracting complementary depth features. These features enhance the low-confidence image features, compensating for the lack of depth. Experiments on the Carla benchmarks show that our method achieves state-of-the-art performance in both driving score and infraction score, with maximum improvement of 15% and 14% over existing algorithms, respectively, maintaining high frame rate of 19.27 FPS.
RayFormer: Improving Query-Based Multi-Camera 3D Object Detection via Ray-Centric Strategies
Jul 27, 2024



The recent advances in query-based multi-camera 3D object detection are featured by initializing object queries in the 3D space, and then sampling features from perspective-view images to perform multi-round query refinement. In such a framework, query points near the same camera ray are likely to sample similar features from very close pixels, resulting in ambiguous query features and degraded detection accuracy. To this end, we introduce RayFormer, a camera-ray-inspired query-based 3D object detector that aligns the initialization and feature extraction of object queries with the optical characteristics of cameras. Specifically, RayFormer transforms perspective-view image features into bird's eye view (BEV) via the lift-splat-shoot method and segments the BEV map to sectors based on the camera rays. Object queries are uniformly and sparsely initialized along each camera ray, facilitating the projection of different queries onto different areas in the image to extract distinct features. Besides, we leverage the instance information of images to supplement the uniformly initialized object queries by further involving additional queries along the ray from 2D object detection boxes. To extract unique object-level features that cater to distinct queries, we design a ray sampling method that suitably organizes the distribution of feature sampling points on both images and bird's eye view. Extensive experiments are conducted on the nuScenes dataset to validate our proposed ray-inspired model design. The proposed RayFormer achieves 55.5% mAP and 63.3% NDS, respectively. Our codes will be made available.
Perception Helps Planning: Facilitating Multi-Stage Lane-Level Integration via Double-Edge Structures
Jul 16, 2024



When planning for autonomous driving, it is crucial to consider essential traffic elements such as lanes, intersections, traffic regulations, and dynamic agents. However, they are often overlooked by the traditional end-to-end planning methods, likely leading to inefficiencies and non-compliance with traffic regulations. In this work, we endeavor to integrate the perception of these elements into the planning task. To this end, we propose Perception Helps Planning (PHP), a novel framework that reconciles lane-level planning with perception. This integration ensures that planning is inherently aligned with traffic constraints, thus facilitating safe and efficient driving. Specifically, PHP focuses on both edges of a lane for planning and perception purposes, taking into consideration the 3D positions of both lane edges and attributes for lane intersections, lane directions, lane occupancy, and planning. In the algorithmic design, the process begins with the transformer encoding multi-camera images to extract the above features and predicting lane-level perception results. Next, the hierarchical feature early fusion module refines the features for predicting planning attributes. Finally, the double-edge interpreter utilizes a late-fusion process specifically designed to integrate lane-level perception and planning information, culminating in the generation of vehicle control signals. Experiments on three Carla benchmarks show significant improvements in driving score of 27.20%, 33.47%, and 15.54% over existing algorithms, respectively, achieving the state-of-the-art performance, with the system operating up to 22.57 FPS.