 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePoIFusion: Multi-Modal 3D Object Detection via Fusion at Points of Interest
Paper and Code
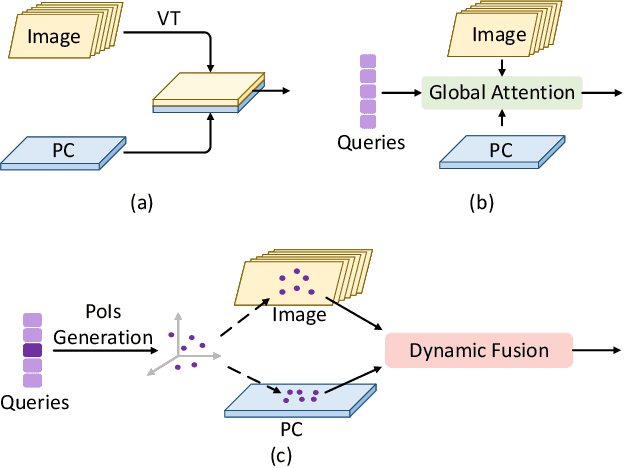
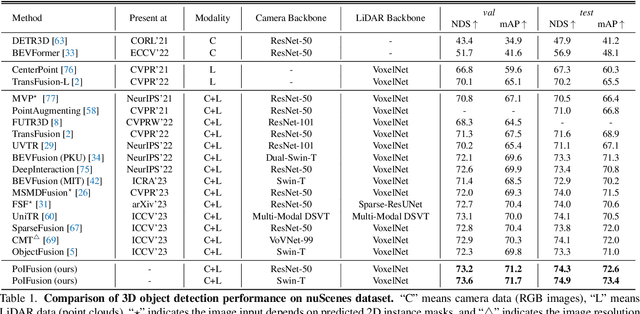
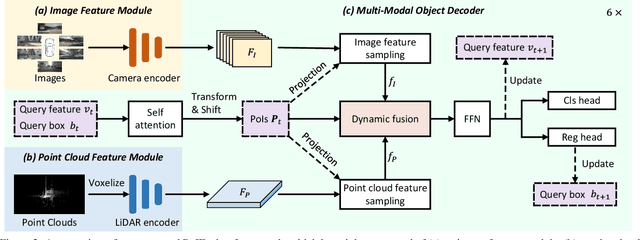
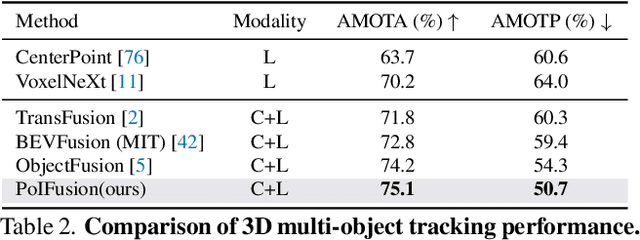
In this work, we present PoIFusion, a simple yet effective multi-modal 3D object detection framework to fuse the information of RGB images and LiDAR point clouds at the point of interest (abbreviated as PoI). Technically, our PoIFusion follows the paradigm of query-based object detection, formulating object queries as dynamic 3D boxes. The PoIs are adaptively generated from each query box on the fly, serving as the keypoints to represent a 3D object and play the role of basic units in multi-modal fusion. Specifically, we project PoIs into the view of each modality to sample the corresponding feature and integrate the multi-modal features at each PoI through a dynamic fusion block. Furthermore, the features of PoIs derived from the same query box are aggregated together to update the query feature. Our approach prevents information loss caused by view transformation and eliminates the computation-intensive global attention, making the multi-modal 3D object detector more applicable. We conducted extensive experiments on the nuScenes dataset to evaluate our approach. Remarkably, our PoIFusion achieves 74.9\% NDS and 73.4\% mAP, setting a state-of-the-art record on the multi-modal 3D object detection benchmark. Codes will be made available via \url{https://djiajunustc.github.io/projects/poifusion}.