 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOn the Entropy Dynamics in Reinforcement Fine-Tuning of Large Language Models
Feb 03, 2026Entropy serves as a critical metric for measuring the diversity of outputs generated by large language models (LLMs), providing valuable insights into their exploration capabilities. While recent studies increasingly focus on monitoring and adjusting entropy to better balance exploration and exploitation in reinforcement fine-tuning (RFT), a principled understanding of entropy dynamics during this process is yet to be thoroughly investigated. In this paper, we establish a theoretical framework for analyzing the entropy dynamics during the RFT process, which begins with a discriminant expression that quantifies entropy change under a single logit update. This foundation enables the derivation of a first-order expression for entropy change, which can be further extended to the update formula of Group Relative Policy Optimization (GRPO). The corollaries and insights drawn from the theoretical analysis inspire the design of entropy control methods, and also offer a unified lens for interpreting various entropy-based methods in existing studies. We provide empirical evidence to support the main conclusions of our analysis and demonstrate the effectiveness of the derived entropy-discriminator clipping methods. This study yields novel insights into RFT training dynamics, providing theoretical support and practical strategies for optimizing the exploration-exploitation balance during LLM fine-tuning.
Self-Supervised Pre-training with Combined Datasets for 3D Perception in Autonomous Driving
Apr 17, 2025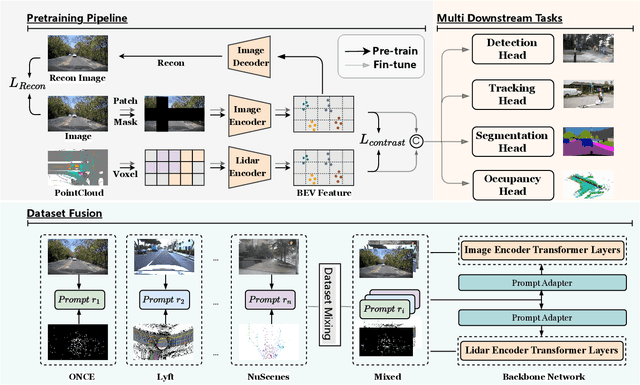

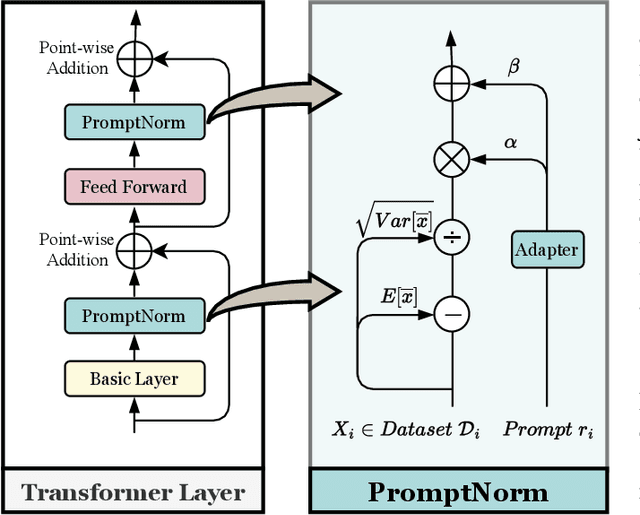
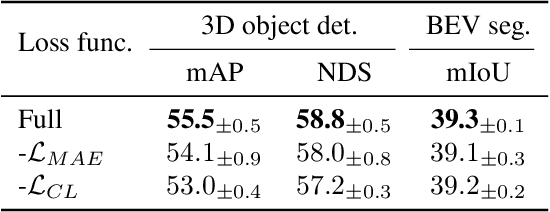
The significant achievements of pre-trained models leveraging large volumes of data in the field of NLP and 2D vision inspire us to explore the potential of extensive data pre-training for 3D perception in autonomous driving. Toward this goal, this paper proposes to utilize massive unlabeled data from heterogeneous datasets to pre-train 3D perception models. We introduce a self-supervised pre-training framework that learns effective 3D representations from scratch on unlabeled data, combined with a prompt adapter based domain adaptation strategy to reduce dataset bias. The approach significantly improves model performance on downstream tasks such as 3D object detection, BEV segmentation, 3D object tracking, and occupancy prediction, and shows steady performance increase as the training data volume scales up, demonstrating the potential of continually benefit 3D perception models for autonomous driving. We will release the source code to inspire further investigations in the community.