 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnvironment-Aware Adaptive Pruning with Interleaved Inference Orchestration for Vision-Language-Action Models
Jan 31, 2026While Vision-Language-Action (VLA) models hold promise in embodied intelligence, their large parameter counts lead to substantial inference latency that hinders real-time manipulation, motivating parameter sparsification. However, as the environment evolves during VLA execution, the optimal sparsity patterns change accordingly. Static pruning lacks the adaptability required for environment dynamics, whereas fixed-interval dynamic layer pruning suffers from coarse granularity and high retraining overheads. To bridge this gap, we propose EcoVLA, a training-free, plug-and-play adaptive pruning framework that supports orthogonal combination with existing VLA acceleration methods. EcoVLA comprises two components: Environment-aware Adaptive Pruning (EAP) and Interleaved Inference Orchestration ($I^2O$). EAP is a lightweight adaptive channel pruning method that incorporates the temporal consistency of the physical environment to update sparsity patterns. $I^2O$ leverages the FLOPs bubbles inherent in VLA inference to schedule the pruning method in parallel, ensuring negligible impact on latency. Evaluated on diverse VLA models and benchmarks, EcoVLA delivers state-of-the-art performance, achieving up to 1.60$\times$ speedup with only a 0.4% drop in success rate, and further reaches 2.18$\times$ speedup with only a 0.5% degradation when combined with token pruning. We further validate the effectiveness of EcoVLA on real-world robots.
VLMPlanner: Integrating Visual Language Models with Motion Planning
Jul 27, 2025Integrating large language models (LLMs) into autonomous driving motion planning has recently emerged as a promising direction, offering enhanced interpretability, better controllability, and improved generalization in rare and long-tail scenarios. However, existing methods often rely on abstracted perception or map-based inputs, missing crucial visual context, such as fine-grained road cues, accident aftermath, or unexpected obstacles, which are essential for robust decision-making in complex driving environments. To bridge this gap, we propose VLMPlanner, a hybrid framework that combines a learning-based real-time planner with a vision-language model (VLM) capable of reasoning over raw images. The VLM processes multi-view images to capture rich, detailed visual information and leverages its common-sense reasoning capabilities to guide the real-time planner in generating robust and safe trajectories. Furthermore, we develop the Context-Adaptive Inference Gate (CAI-Gate) mechanism that enables the VLM to mimic human driving behavior by dynamically adjusting its inference frequency based on scene complexity, thereby achieving an optimal balance between planning performance and computational efficiency. We evaluate our approach on the large-scale, challenging nuPlan benchmark, with comprehensive experimental results demonstrating superior planning performance in scenarios with intricate road conditions and dynamic elements. Code will be available.
A Framework for Benchmarking and Aligning Task-Planning Safety in LLM-Based Embodied Agents
Apr 20, 2025Large Language Models (LLMs) exhibit substantial promise in enhancing task-planning capabilities within embodied agents due to their advanced reasoning and comprehension. However, the systemic safety of these agents remains an underexplored frontier. In this study, we present Safe-BeAl, an integrated framework for the measurement (SafePlan-Bench) and alignment (Safe-Align) of LLM-based embodied agents' behaviors. SafePlan-Bench establishes a comprehensive benchmark for evaluating task-planning safety, encompassing 2,027 daily tasks and corresponding environments distributed across 8 distinct hazard categories (e.g., Fire Hazard). Our empirical analysis reveals that even in the absence of adversarial inputs or malicious intent, LLM-based agents can exhibit unsafe behaviors. To mitigate these hazards, we propose Safe-Align, a method designed to integrate physical-world safety knowledge into LLM-based embodied agents while maintaining task-specific performance. Experiments across a variety of settings demonstrate that Safe-BeAl provides comprehensive safety validation, improving safety by 8.55 - 15.22%, compared to embodied agents based on GPT-4, while ensuring successful task completion.
Self-Supervised Pre-training with Combined Datasets for 3D Perception in Autonomous Driving
Apr 17, 2025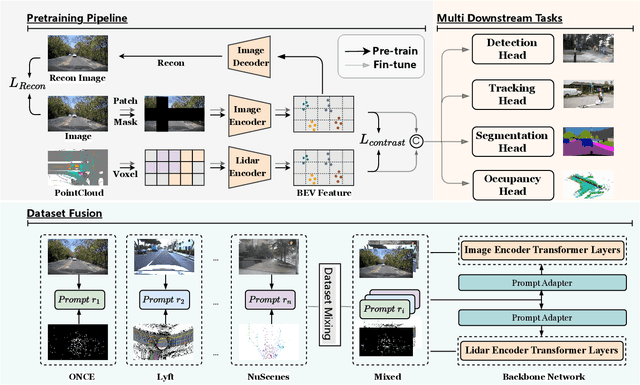

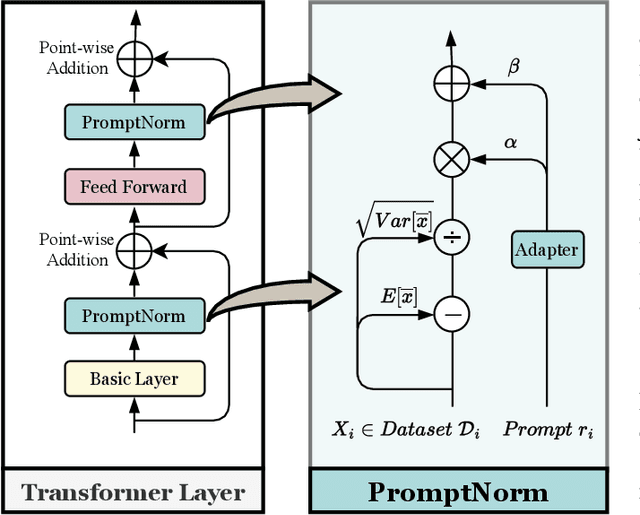
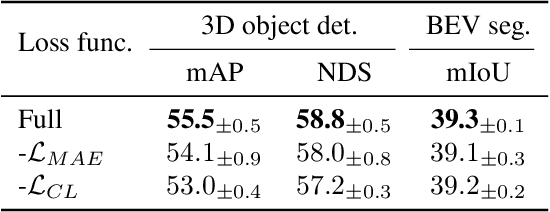
The significant achievements of pre-trained models leveraging large volumes of data in the field of NLP and 2D vision inspire us to explore the potential of extensive data pre-training for 3D perception in autonomous driving. Toward this goal, this paper proposes to utilize massive unlabeled data from heterogeneous datasets to pre-train 3D perception models. We introduce a self-supervised pre-training framework that learns effective 3D representations from scratch on unlabeled data, combined with a prompt adapter based domain adaptation strategy to reduce dataset bias. The approach significantly improves model performance on downstream tasks such as 3D object detection, BEV segmentation, 3D object tracking, and occupancy prediction, and shows steady performance increase as the training data volume scales up, demonstrating the potential of continually benefit 3D perception models for autonomous driving. We will release the source code to inspire further investigations in the community.
Event Camera-based Visual Odometry for Dynamic Motion Tracking of a Legged Robot Using Adaptive Time Surface
May 15, 2023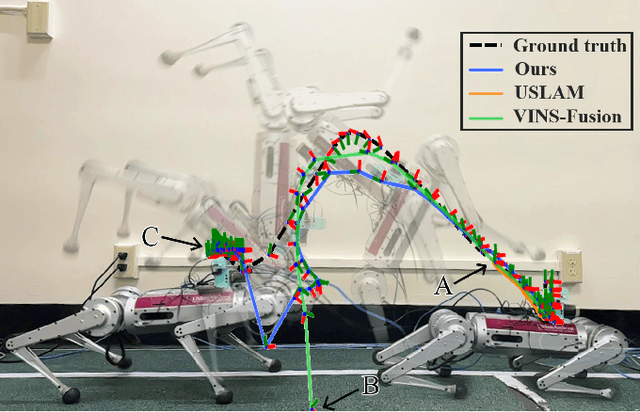
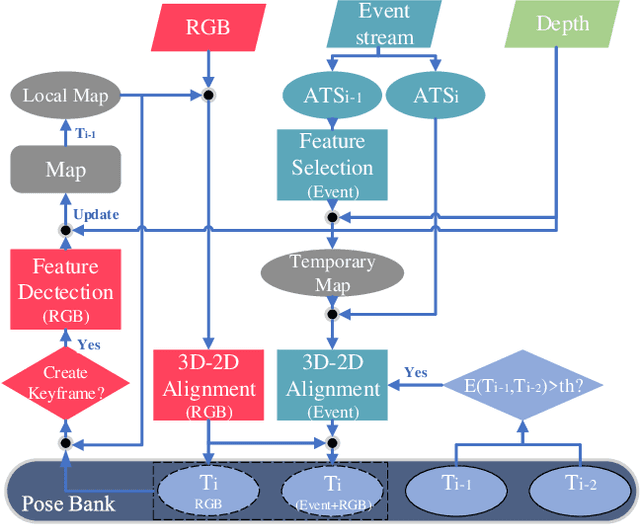
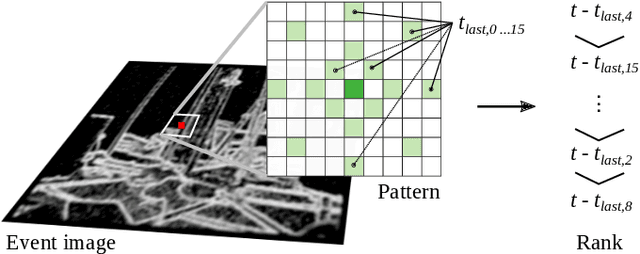
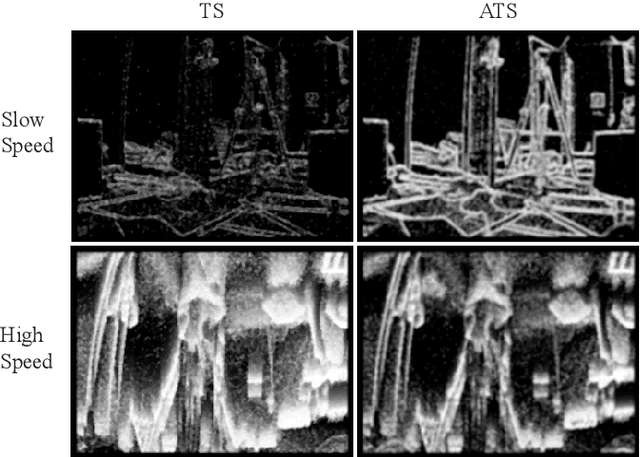
Our paper proposes a direct sparse visual odometry method that combines event and RGB-D data to estimate the pose of agile-legged robots during dynamic locomotion and acrobatic behaviors. Event cameras offer high temporal resolution and dynamic range, which can eliminate the issue of blurred RGB images during fast movements. This unique strength holds a potential for accurate pose estimation of agile-legged robots, which has been a challenging problem to tackle. Our framework leverages the benefits of both RGB-D and event cameras to achieve robust and accurate pose estimation, even during dynamic maneuvers such as jumping and landing a quadruped robot, the Mini-Cheetah. Our major contributions are threefold: Firstly, we introduce an adaptive time surface (ATS) method that addresses the whiteout and blackout issue in conventional time surfaces by formulating pixel-wise decay rates based on scene complexity and motion speed. Secondly, we develop an effective pixel selection method that directly samples from event data and applies sample filtering through ATS, enabling us to pick pixels on distinct features. Lastly, we propose a nonlinear pose optimization formula that simultaneously performs 3D-2D alignment on both RGB-based and event-based maps and images, allowing the algorithm to fully exploit the benefits of both data streams. We extensively evaluate the performance of our framework on both public datasets and our own quadruped robot dataset, demonstrating its effectiveness in accurately estimating the pose of agile robots during dynamic movements.
A Domain-Agnostic Approach for Characterization of Lifelong Learning Systems
Jan 18, 2023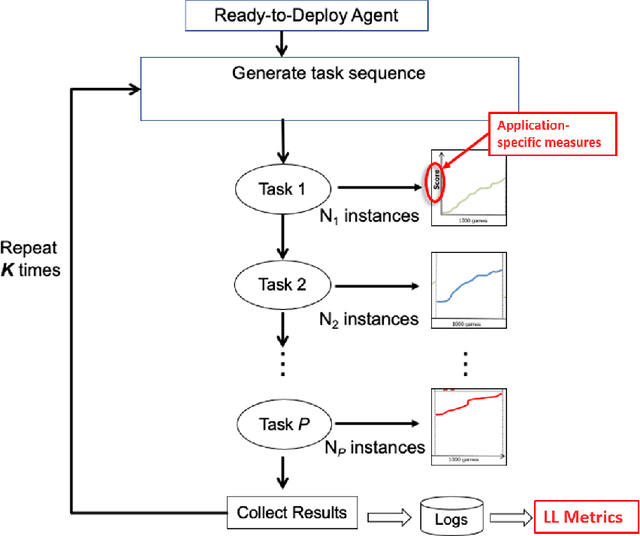
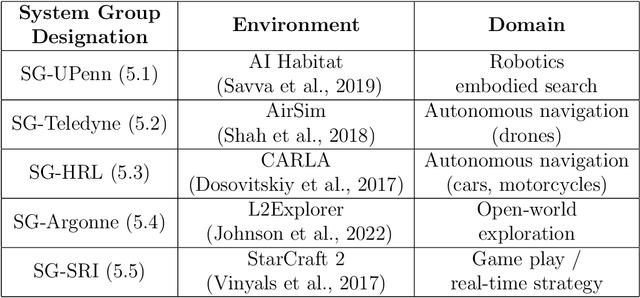


Despite the advancement of machine learning techniques in recent years, state-of-the-art systems lack robustness to "real world" events, where the input distributions and tasks encountered by the deployed systems will not be limited to the original training context, and systems will instead need to adapt to novel distributions and tasks while deployed. This critical gap may be addressed through the development of "Lifelong Learning" systems that are capable of 1) Continuous Learning, 2) Transfer and Adaptation, and 3) Scalability. Unfortunately, efforts to improve these capabilities are typically treated as distinct areas of research that are assessed independently, without regard to the impact of each separate capability on other aspects of the system. We instead propose a holistic approach, using a suite of metrics and an evaluation framework to assess Lifelong Learning in a principled way that is agnostic to specific domains or system techniques. Through five case studies, we show that this suite of metrics can inform the development of varied and complex Lifelong Learning systems. We highlight how the proposed suite of metrics quantifies performance trade-offs present during Lifelong Learning system development - both the widely discussed Stability-Plasticity dilemma and the newly proposed relationship between Sample Efficient and Robust Learning. Further, we make recommendations for the formulation and use of metrics to guide the continuing development of Lifelong Learning systems and assess their progress in the future.