 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImpedance Matching: Enabling an RL-Based Running Jump in a Quadruped Robot
Apr 30, 2024



Replicating the remarkable athleticism seen in animals has long been a challenge in robotics control. Although Reinforcement Learning (RL) has demonstrated significant progress in dynamic legged locomotion control, the substantial sim-to-real gap often hinders the real-world demonstration of truly dynamic movements. We propose a new framework to mitigate this gap through frequency-domain analysis-based impedance matching between simulated and real robots. Our framework offers a structured guideline for parameter selection and the range for dynamics randomization in simulation, thus facilitating a safe sim-to-real transfer. The learned policy using our framework enabled jumps across distances of 55 cm and heights of 38 cm. The results are, to the best of our knowledge, one of the highest and longest running jumps demonstrated by an RL-based control policy in a real quadruped robot. Note that the achieved jumping height is approximately 85% of that obtained from a state-of-the-art trajectory optimization method, which can be seen as the physical limit for the given robot hardware. In addition, our control policy accomplished stable walking at speeds up to 2 m/s in the forward and backward directions, and 1 m/s in the sideway direction.
StaccaToe: A Single-Leg Robot that Mimics the Human Leg and Toe
Apr 07, 2024



We introduce StaccaToe, a human-scale, electric motor-powered single-leg robot designed to rival the agility of human locomotion through two distinctive attributes: an actuated toe and a co-actuation configuration inspired by the human leg. Leveraging the foundational design of HyperLeg's lower leg mechanism, we develop a stand-alone robot by incorporating new link designs, custom-designed power electronics, and a refined control system. Unlike previous jumping robots that rely on either special mechanisms (e.g., springs and clutches) or hydraulic/pneumatic actuators, StaccaToe employs electric motors without energy storage mechanisms. This choice underscores our ultimate goal of developing a practical, high-performance humanoid robot capable of human-like, stable walking as well as explosive dynamic movements. In this paper, we aim to empirically evaluate the balance capability and the exertion of explosive ground reaction forces of our toe and co-actuation mechanisms. Throughout extensive hardware and controller development, StaccaToe showcases its control fidelity by demonstrating a balanced tip-toe stance and dynamic jump. This study is significant for three key reasons: 1) StaccaToe represents the first human-scale, electric motor-driven single-leg robot to execute dynamic maneuvers without relying on specialized mechanisms; 2) our research provides empirical evidence of the benefits of replicating critical human leg attributes in robotic design; and 3) we explain the design process for creating agile legged robots, the details that have been scantily covered in academic literature.
EAGLE: The First Event Camera Dataset Gathered by an Agile Quadruped Robot
Apr 06, 2024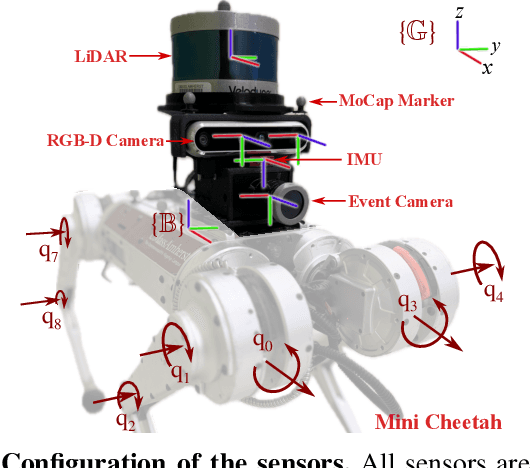
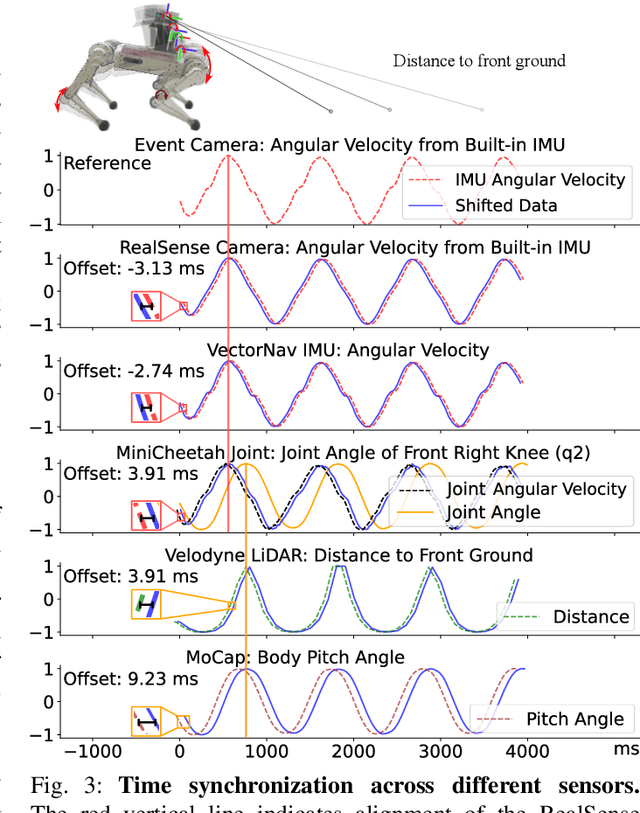
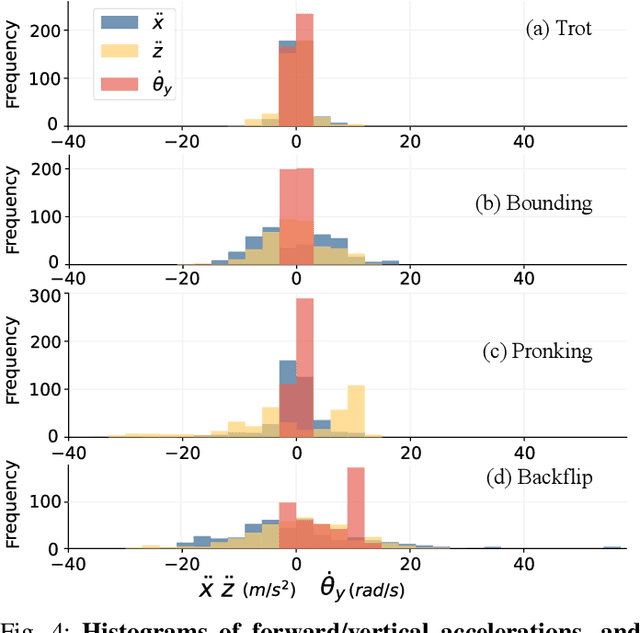
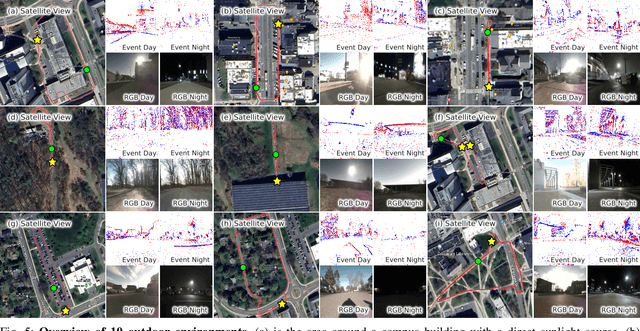
When legged robots perform agile movements, traditional RGB cameras often produce blurred images, posing a challenge for accurate state estimation. Event cameras, inspired by biological vision mechanisms, have emerged as a promising solution for capturing high-speed movements and coping with challenging lighting conditions, owing to their significant advantages, such as low latency, high temporal resolution, and a high dynamic range. However, the integration of event cameras into agile-legged robots is still largely unexplored. Notably, no event camera-based dataset has yet been specifically developed for dynamic legged robots. To bridge this gap, we introduce EAGLE (Event dataset of an AGile LEgged robot), a new dataset comprising data from an event camera, an RGB-D camera, an IMU, a LiDAR, and joint angle encoders, all mounted on a quadruped robotic platform. This dataset features more than 100 sequences from real-world environments, encompassing various indoor and outdoor environments, different lighting conditions, a range of robot gaits (e.g., trotting, bounding, pronking), as well as acrobatic movements such as backflipping. To our knowledge, this is the first event camera dataset to include multi-sensory data collected by an agile quadruped robot.
Event Camera-based Visual Odometry for Dynamic Motion Tracking of a Legged Robot Using Adaptive Time Surface
May 15, 2023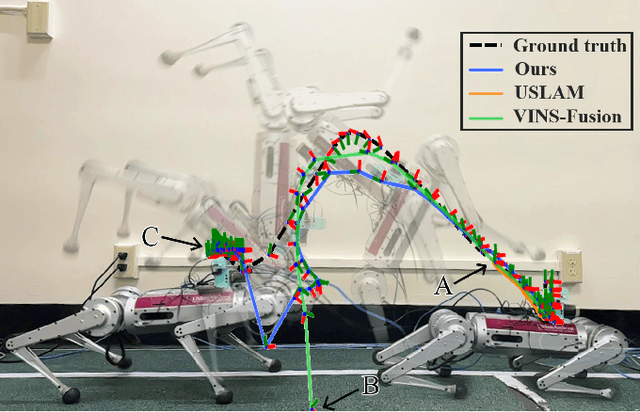
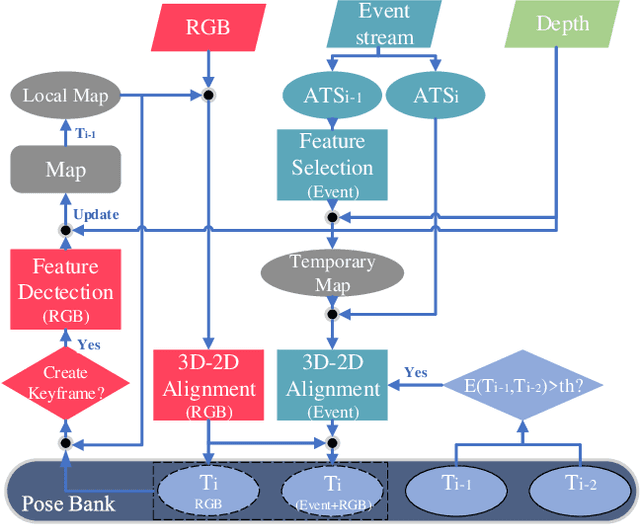
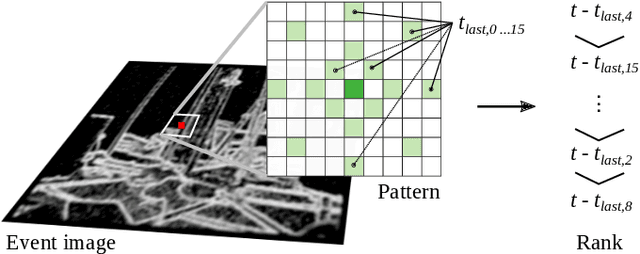
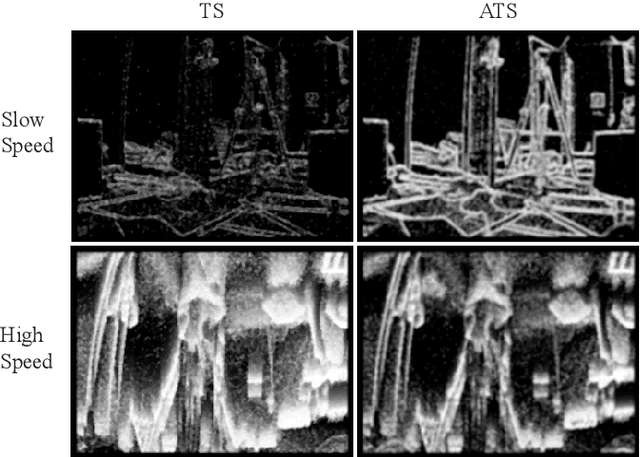
Our paper proposes a direct sparse visual odometry method that combines event and RGB-D data to estimate the pose of agile-legged robots during dynamic locomotion and acrobatic behaviors. Event cameras offer high temporal resolution and dynamic range, which can eliminate the issue of blurred RGB images during fast movements. This unique strength holds a potential for accurate pose estimation of agile-legged robots, which has been a challenging problem to tackle. Our framework leverages the benefits of both RGB-D and event cameras to achieve robust and accurate pose estimation, even during dynamic maneuvers such as jumping and landing a quadruped robot, the Mini-Cheetah. Our major contributions are threefold: Firstly, we introduce an adaptive time surface (ATS) method that addresses the whiteout and blackout issue in conventional time surfaces by formulating pixel-wise decay rates based on scene complexity and motion speed. Secondly, we develop an effective pixel selection method that directly samples from event data and applies sample filtering through ATS, enabling us to pick pixels on distinct features. Lastly, we propose a nonlinear pose optimization formula that simultaneously performs 3D-2D alignment on both RGB-based and event-based maps and images, allowing the algorithm to fully exploit the benefits of both data streams. We extensively evaluate the performance of our framework on both public datasets and our own quadruped robot dataset, demonstrating its effectiveness in accurately estimating the pose of agile robots during dynamic movements.