 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeiSeal: Encrypted Fingerprinting for Reliable LLM Ownership Verification
Nov 12, 2025Given the high cost of large language model (LLM) training from scratch, safeguarding LLM intellectual property (IP) has become increasingly crucial. As the standard paradigm for IP ownership verification, LLM fingerprinting thus plays a vital role in addressing this challenge. Existing LLM fingerprinting methods verify ownership by extracting or injecting model-specific features. However, they overlook potential attacks during the verification process, leaving them ineffective when the model thief fully controls the LLM's inference process. In such settings, attackers may share prompt-response pairs to enable fingerprint unlearning or manipulate outputs to evade exact-match verification. We propose iSeal, the first fingerprinting method designed for reliable verification when the model thief controls the suspected LLM in an end-to-end manner. It injects unique features into both the model and an external module, reinforced by an error-correction mechanism and a similarity-based verification strategy. These components are resistant to verification-time attacks, including collusion-based fingerprint unlearning and response manipulation, backed by both theoretical analysis and empirical results. iSeal achieves 100 percent Fingerprint Success Rate (FSR) on 12 LLMs against more than 10 attacks, while baselines fail under unlearning and response manipulations.
EAGLE: The First Event Camera Dataset Gathered by an Agile Quadruped Robot
Apr 06, 2024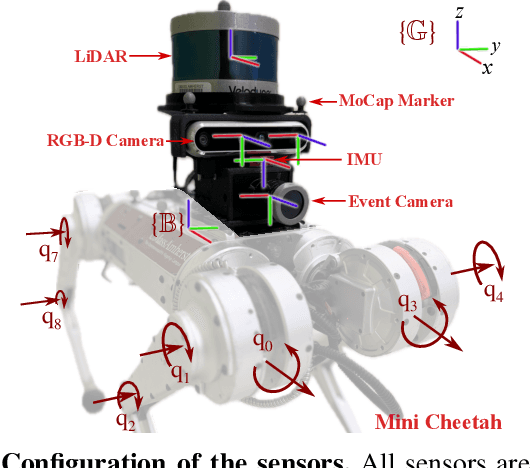
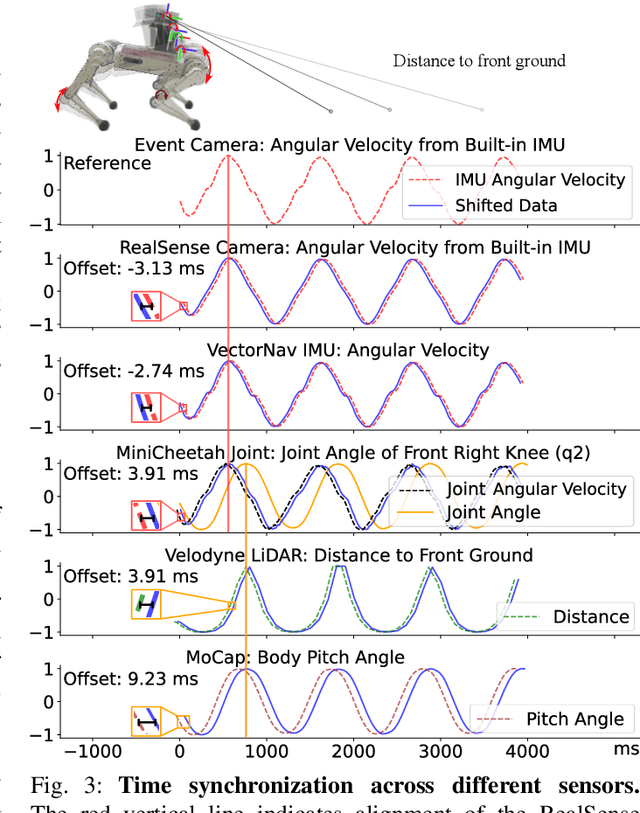
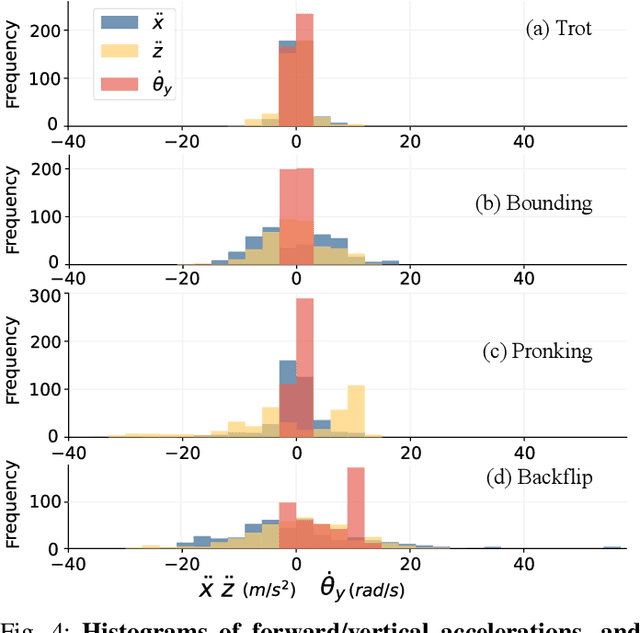
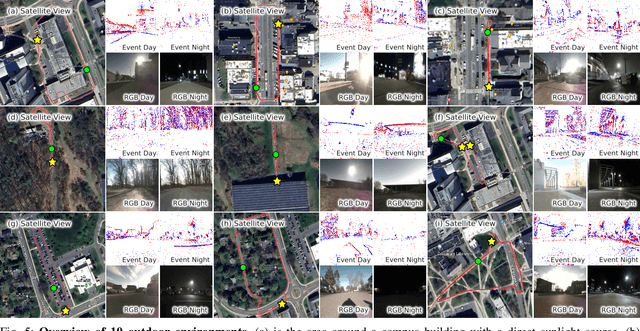
When legged robots perform agile movements, traditional RGB cameras often produce blurred images, posing a challenge for accurate state estimation. Event cameras, inspired by biological vision mechanisms, have emerged as a promising solution for capturing high-speed movements and coping with challenging lighting conditions, owing to their significant advantages, such as low latency, high temporal resolution, and a high dynamic range. However, the integration of event cameras into agile-legged robots is still largely unexplored. Notably, no event camera-based dataset has yet been specifically developed for dynamic legged robots. To bridge this gap, we introduce EAGLE (Event dataset of an AGile LEgged robot), a new dataset comprising data from an event camera, an RGB-D camera, an IMU, a LiDAR, and joint angle encoders, all mounted on a quadruped robotic platform. This dataset features more than 100 sequences from real-world environments, encompassing various indoor and outdoor environments, different lighting conditions, a range of robot gaits (e.g., trotting, bounding, pronking), as well as acrobatic movements such as backflipping. To our knowledge, this is the first event camera dataset to include multi-sensory data collected by an agile quadruped robot.