 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Biomechanics-Inspired Approach to Soccer Kicking for Humanoid Robots
Jul 19, 2024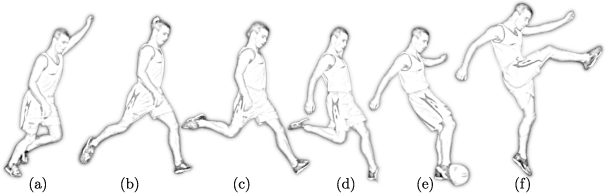
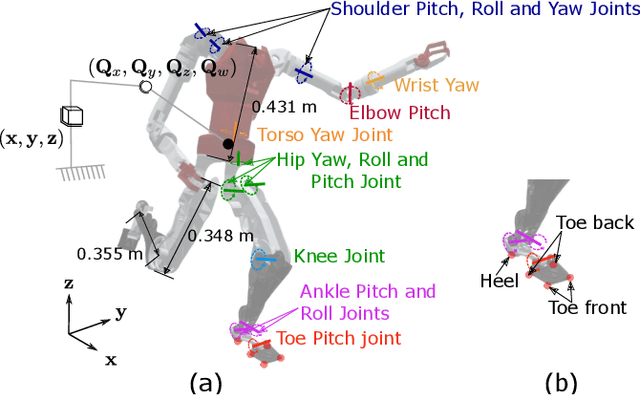
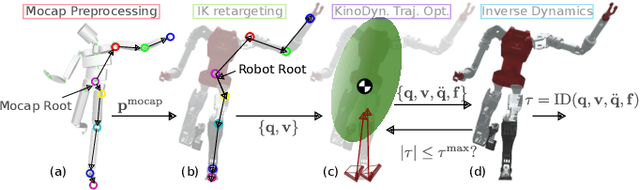
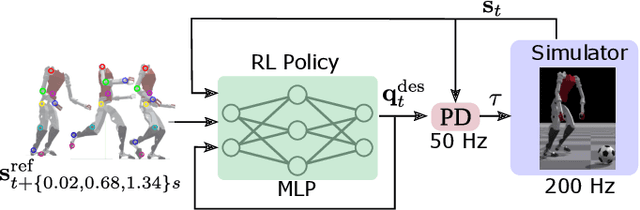
Soccer kicking is a complex whole-body motion that requires intricate coordination of various motor actions. To accomplish such dynamic motion in a humanoid robot, the robot needs to simultaneously: 1) transfer high kinetic energy to the kicking leg, 2) maintain balance and stability of the entire body, and 3) manage the impact disturbance from the ball during the kicking moment. Prior studies on robotic soccer kicking often prioritized stability, leading to overly conservative quasi-static motions. In this work, we present a biomechanics-inspired control framework that leverages trajectory optimization and imitation learning to facilitate highly dynamic soccer kicks in humanoid robots. We conducted an in-depth analysis of human soccer kick biomechanics to identify key motion constraints. Based on this understanding, we designed kinodynamically feasible trajectories that are then used as a reference in imitation learning to develop a robust feedback control policy. We demonstrate the effectiveness of our approach through a simulation of an anthropomorphic 25 DoF bipedal humanoid robot, named PresToe, which is equipped with 7 DoF legs, including a unique actuated toe. Using our framework, PresToe can execute dynamic instep kicks, propelling the ball at speeds exceeding 11m/s in full dynamics simulation.
Learning Generic and Dynamic Locomotion of Humanoids Across Discrete Terrains
May 27, 2024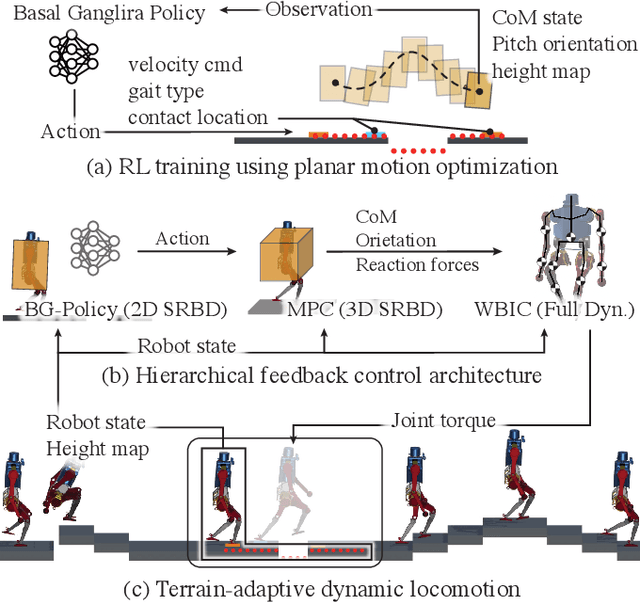



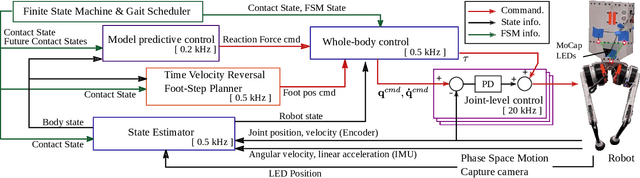
This paper addresses the challenge of terrain-adaptive dynamic locomotion in humanoid robots, a problem traditionally tackled by optimization-based methods or reinforcement learning (RL). Optimization-based methods, such as model-predictive control, excel in finding optimal reaction forces and achieving agile locomotion, especially in quadruped, but struggle with the nonlinear hybrid dynamics of legged systems and the real-time computation of step location, timing, and reaction forces. Conversely, RL-based methods show promise in navigating dynamic and rough terrains but are limited by their extensive data requirements. We introduce a novel locomotion architecture that integrates a neural network policy, trained through RL in simplified environments, with a state-of-the-art motion controller combining model-predictive control (MPC) and whole-body impulse control (WBIC). The policy efficiently learns high-level locomotion strategies, such as gait selection and step positioning, without the need for full dynamics simulations. This control architecture enables humanoid robots to dynamically navigate discrete terrains, making strategic locomotion decisions (e.g., walking, jumping, and leaping) based on ground height maps. Our results demonstrate that this integrated control architecture achieves dynamic locomotion with significantly fewer training samples than conventional RL-based methods and can be transferred to different humanoid platforms without additional training. The control architecture has been extensively tested in dynamic simulations, accomplishing terrain height-based dynamic locomotion for three different robots.
StaccaToe: A Single-Leg Robot that Mimics the Human Leg and Toe
Apr 07, 2024



We introduce StaccaToe, a human-scale, electric motor-powered single-leg robot designed to rival the agility of human locomotion through two distinctive attributes: an actuated toe and a co-actuation configuration inspired by the human leg. Leveraging the foundational design of HyperLeg's lower leg mechanism, we develop a stand-alone robot by incorporating new link designs, custom-designed power electronics, and a refined control system. Unlike previous jumping robots that rely on either special mechanisms (e.g., springs and clutches) or hydraulic/pneumatic actuators, StaccaToe employs electric motors without energy storage mechanisms. This choice underscores our ultimate goal of developing a practical, high-performance humanoid robot capable of human-like, stable walking as well as explosive dynamic movements. In this paper, we aim to empirically evaluate the balance capability and the exertion of explosive ground reaction forces of our toe and co-actuation mechanisms. Throughout extensive hardware and controller development, StaccaToe showcases its control fidelity by demonstrating a balanced tip-toe stance and dynamic jump. This study is significant for three key reasons: 1) StaccaToe represents the first human-scale, electric motor-driven single-leg robot to execute dynamic maneuvers without relying on specialized mechanisms; 2) our research provides empirical evidence of the benefits of replicating critical human leg attributes in robotic design; and 3) we explain the design process for creating agile legged robots, the details that have been scantily covered in academic literature.
Integration of Riemannian Motion Policy and Whole-Body Control for Dynamic Legged Locomotion
Oct 07, 2022


In this paper, we present a novel Riemannian Motion Policy (RMP)flow-based whole-body control framework for improved dynamic legged locomotion. RMPflow is a differential geometry-inspired algorithm for fusing multiple task-space policies (RMPs) into a configuration space policy in a geometrically consistent manner. RMP-based approaches are especially suited for designing simultaneous tracking and collision avoidance behaviors and have been successfully deployed on serial manipulators. However, one caveat of RMPflow is that it is designed with fully actuated systems in mind. In this work, we, for the first time, extend it to the domain of dynamic-legged systems, which have unforgiving under-actuation and limited control input. Thorough push recovery experiments are conducted in simulation to validate the overall framework. We show that expanding the valid stepping region with an RMP-based collision-avoidance swing leg controller improves balance robustness against external disturbances by up to $53\%$ compared to a baseline approach using a restricted stepping region. Furthermore, a point-foot biped robot is purpose-built for experimental studies of dynamic biped locomotion. A preliminary unassisted in-place stepping experiment is conducted to show the viability of the control framework and hardware.