 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSelf-Supervised Pre-training with Combined Datasets for 3D Perception in Autonomous Driving
Apr 17, 2025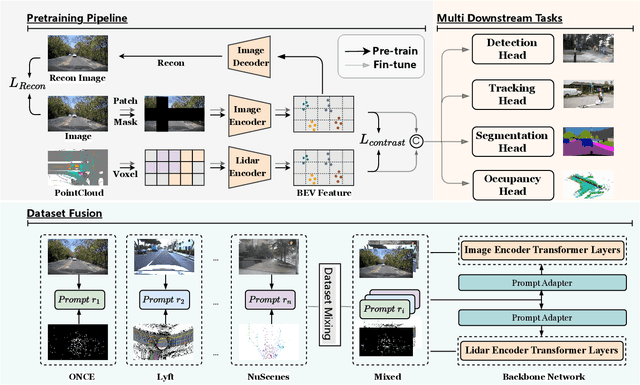

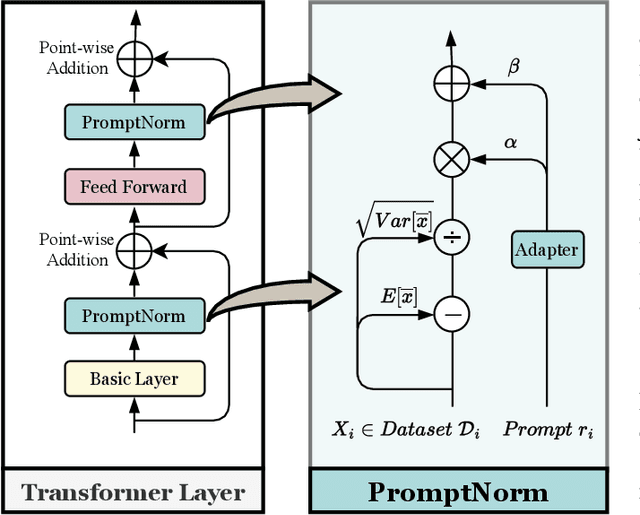
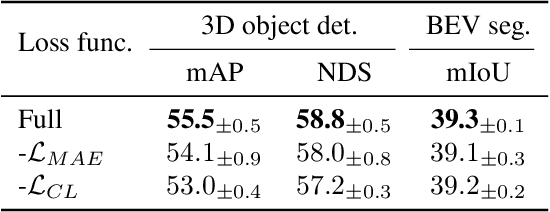
The significant achievements of pre-trained models leveraging large volumes of data in the field of NLP and 2D vision inspire us to explore the potential of extensive data pre-training for 3D perception in autonomous driving. Toward this goal, this paper proposes to utilize massive unlabeled data from heterogeneous datasets to pre-train 3D perception models. We introduce a self-supervised pre-training framework that learns effective 3D representations from scratch on unlabeled data, combined with a prompt adapter based domain adaptation strategy to reduce dataset bias. The approach significantly improves model performance on downstream tasks such as 3D object detection, BEV segmentation, 3D object tracking, and occupancy prediction, and shows steady performance increase as the training data volume scales up, demonstrating the potential of continually benefit 3D perception models for autonomous driving. We will release the source code to inspire further investigations in the community.
MSGField: A Unified Scene Representation Integrating Motion, Semantics, and Geometry for Robotic Manipulation
Oct 21, 2024Combining accurate geometry with rich semantics has been proven to be highly effective for language-guided robotic manipulation. Existing methods for dynamic scenes either fail to update in real-time or rely on additional depth sensors for simple scene editing, limiting their applicability in real-world. In this paper, we introduce MSGField, a representation that uses a collection of 2D Gaussians for high-quality reconstruction, further enhanced with attributes to encode semantic and motion information. Specially, we represent the motion field compactly by decomposing each primitive's motion into a combination of a limited set of motion bases. Leveraging the differentiable real-time rendering of Gaussian splatting, we can quickly optimize object motion, even for complex non-rigid motions, with image supervision from only two camera views. Additionally, we designed a pipeline that utilizes object priors to efficiently obtain well-defined semantics. In our challenging dataset, which includes flexible and extremely small objects, our method achieve a success rate of 79.2% in static and 63.3% in dynamic environments for language-guided manipulation. For specified object grasping, we achieve a success rate of 90%, on par with point cloud-based methods. Code and dataset will be released at:https://shengyu724.github.io/MSGField.github.io.