 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeChainFlow-VLA: Causal Flow Planning with Vision-Language Models
May 22, 2026Current end-to-end autonomous driving systems are fundamentally limited by a mismatch between temporal causal reasoning and global trajectory consistency. Autoregressive (AR) models capture interaction-aware temporal dependencies via causal factorization, but their step-wise decoding leads to error accumulation and suboptimal global structure. In contrast, diffusion models optimize trajectories globally but lack explicit causal constraints, making them unreliable in interactive and safety-critical scenarios. This dichotomy reveals a deeper issue: existing methods treat causal modeling and global optimization as separate paradigms, without a principled way to unify them within a single trajectory distribution. To address this, we propose ChainFlow-VLA, which unifies causal generation and global refinement within a unified probabilistic framework. We formulate planning as a mixture over AR-induced modes and learn Vision-Language Model (VLM)-conditioned residual distributions over these modes. An autoregressive generator (Chain) produces a discrete set of causal trajectory modes, followed by a diffusion-based refiner (Flow) that leverages VLM hidden states as semantic priors to perform mode-conditioned correction in residual space while preserving causal structure. This straightforward conditioning seamlessly injects high-level scene understanding into fine-grained trajectory adjustments. Experiments demonstrate that ChainFlow-VLA achieves robust planning in ambiguous and long-tail scenarios, achieving a state-of-the-art score of 94.85 on the NAVSIM v1 leaderboard, matching human-level performance (94.8). Code will be available at https://github.com/AFARI-Research/ChainFlow-VLA.
Diff-KD: Diffusion-based Knowledge Distillation for Collaborative Perception under Corruptions
Apr 02, 2026Multi-agent collaborative perception enables autonomous systems to overcome individual sensing limits through collective intelligence. However, real-world sensor and communication corruptions severely undermine this advantage. Crucially, existing approaches treat corruptions as static perturbations or passively conform to corrupted inputs, failing to actively recover the underlying clean semantics. To address this limitation, we introduce Diff-KD, a framework that integrates diffusion-based generative refinement into teacher-student knowledge distillation for robust collaborative perception. Diff-KD features two core components: (i) Progressive Knowledge Distillation (PKD), which treats local feature restoration as a conditional diffusion process to recover global semantics from corrupted observations; and (ii) Adaptive Gated Fusion (AGF), which dynamically weights neighbors based on ego reliability during fusion. Evaluated on OPV2V and DAIR-V2X under seven corruption types, Diff-KD achieves state-of-the-art performance in both detection accuracy and calibration robustness.
CATNet: Collaborative Alignment and Transformation Network for Cooperative Perception
Mar 05, 2026Cooperative perception significantly enhances scene understanding by integrating complementary information from diverse agents. However, existing research often overlooks critical challenges inherent in real-world multi-source data integration, specifically high temporal latency and multi-source noise. To address these practical limitations, we propose Collaborative Alignment and Transformation Network (CATNet), an adaptive compensation framework that resolves temporal latency and noise interference in multi-agent systems. Our key innovations can be summarized in three aspects. First, we introduce a Spatio-Temporal Recurrent Synchronization (STSync) that aligns asynchronous feature streams via adjacent-frame differential modeling, establishing a temporal-spatially unified representation space. Second, we design a Dual-Branch Wavelet Enhanced Denoiser (WTDen) that suppresses global noise and reconstructs localized feature distortions within aligned representations. Third, we construct an Adaptive Feature Selector (AdpSel) that dynamically focuses on critical perceptual features for robust fusion. Extensive experiments on multiple datasets demonstrate that CATNet consistently outperforms existing methods under complex traffic conditions, proving its superior robustness and adaptability.
WhisperNet: A Scalable Solution for Bandwidth-Efficient Collaboration
Mar 02, 2026Collaborative perception is vital for autonomous driving yet remains constrained by tight communication budgets. Earlier work reduced bandwidth by compressing full feature maps with fixed-rate encoders, which adapts poorly to a changing environment, and it further evolved into spatial selection methods that improve efficiency by focusing on salient regions, but this object-centric approach often sacrifices global context, weakening holistic scene understanding. To overcome these limitations, we introduce \textit{WhisperNet}, a bandwidth-aware framework that proposes a novel, receiver-centric paradigm for global coordination across agents. Senders generate lightweight saliency metadata, while the receiver formulates a global request plan that dynamically budgets feature contributions across agents and features, retrieving only the most informative features. A collaborative feature routing module then aligns related messages before fusion to ensure structural consistency. Extensive experiments show that WhisperNet achieves state-of-the-art performance, improving AP@0.7 on OPV2V by 2.4\% with only 0.5\% of the communication cost. As a plug-and-play component, it boosts strong baselines with merely 5\% of full bandwidth while maintaining robustness under localization noise. These results demonstrate that globally-coordinated allocation across \textit{what} and \textit{where} to share is the key to achieving efficient collaborative perception.
CoopDiff: A Diffusion-Guided Approach for Cooperation under Corruptions
Mar 02, 2026Cooperative perception lets agents share information to expand coverage and improve scene understanding. However, in real-world scenarios, diverse and unpredictable corruptions undermine its robustness and generalization. To address these challenges, we introduce CoopDiff, a diffusion-based cooperative perception framework that mitigates corruptions via a denoising mechanism. CoopDiff adopts a teacher-student paradigm: the Quality-Aware Teacher performs voxel-level early fusion with Quality of Interest weighting and semantic guidance, then produces clean supervision features via a diffusion denoiser. The Dual-Branch Diffusion Student first separates ego and cooperative streams in encoding to reconstruct the teacher's clean targets. And then, an Ego-Guided Cross-Attention mechanism facilitates balanced decoding under degradation by adaptively integrating ego and cooperative features. We evaluate CoopDiff on two constructed multi-degradation benchmarks, OPV2Vn and DAIR-V2Xn, each incorporating six corruption types, including environmental and sensor-level distortions. Benefiting from the inherent denoising properties of diffusion, CoopDiff consistently outperforms prior methods across all degradation types and lowers the relative corruption error. Furthermore, it offers a tunable balance between precision and inference efficiency.
TKG-Thinker: Towards Dynamic Reasoning over Temporal Knowledge Graphs via Agentic Reinforcement Learning
Feb 05, 2026Temporal knowledge graph question answering (TKGQA) aims to answer time-sensitive questions by leveraging temporal knowledge bases. While Large Language Models (LLMs) demonstrate significant potential in TKGQA, current prompting strategies constrain their efficacy in two primary ways. First, they are prone to reasoning hallucinations under complex temporal constraints. Second, static prompting limits model autonomy and generalization, as it lack optimization through dynamic interaction with temporal knowledge graphs (TKGs) environments. To address these limitations, we propose \textbf{TKG-Thinker}, a novel agent equipped with autonomous planning and adaptive retrieval capabilities for reasoning over TKGs. Specifically, TKG-Thinker performs in-depth temporal reasoning through dynamic multi-turn interactions with TKGs via a dual-training strategy. We first apply Supervised Fine-Tuning (SFT) with chain-of thought data to instill core planning capabilities, followed by a Reinforcement Learning (RL) stage that leverages multi-dimensional rewards to refine reasoning policies under intricate temporal constraints. Experimental results on benchmark datasets with three open-source LLMs show that TKG-Thinker achieves state-of-the-art performance and exhibits strong generalization across complex TKGQA settings.
CoRA: A Collaborative Robust Architecture with Hybrid Fusion for Efficient Perception
Dec 15, 2025Collaborative perception has garnered significant attention as a crucial technology to overcome the perceptual limitations of single-agent systems. Many state-of-the-art (SOTA) methods have achieved communication efficiency and high performance via intermediate fusion. However, they share a critical vulnerability: their performance degrades under adverse communication conditions due to the misalignment induced by data transmission, which severely hampers their practical deployment. To bridge this gap, we re-examine different fusion paradigms, and recover that the strengths of intermediate and late fusion are not a trade-off, but a complementary pairing. Based on this key insight, we propose CoRA, a novel collaborative robust architecture with a hybrid approach to decouple performance from robustness with low communication. It is composed of two components: a feature-level fusion branch and an object-level correction branch. Its first branch selects critical features and fuses them efficiently to ensure both performance and scalability. The second branch leverages semantic relevance to correct spatial displacements, guaranteeing resilience against pose errors. Experiments demonstrate the superiority of CoRA. Under extreme scenarios, CoRA improves upon its baseline performance by approximately 19% in AP@0.7 with more than 5x less communication volume, which makes it a promising solution for robust collaborative perception.
CompLex: Music Theory Lexicon Constructed by Autonomous Agents for Automatic Music Generation
Aug 27, 2025Generative artificial intelligence in music has made significant strides, yet it still falls short of the substantial achievements seen in natural language processing, primarily due to the limited availability of music data. Knowledge-informed approaches have been shown to enhance the performance of music generation models, even when only a few pieces of musical knowledge are integrated. This paper seeks to leverage comprehensive music theory in AI-driven music generation tasks, such as algorithmic composition and style transfer, which traditionally require significant manual effort with existing techniques. We introduce a novel automatic music lexicon construction model that generates a lexicon, named CompLex, comprising 37,432 items derived from just 9 manually input category keywords and 5 sentence prompt templates. A new multi-agent algorithm is proposed to automatically detect and mitigate hallucinations. CompLex demonstrates impressive performance improvements across three state-of-the-art text-to-music generation models, encompassing both symbolic and audio-based methods. Furthermore, we evaluate CompLex in terms of completeness, accuracy, non-redundancy, and executability, confirming that it possesses the key characteristics of an effective lexicon.
RollingQ: Reviving the Cooperation Dynamics in Multimodal Transformer
Jun 13, 2025Multimodal learning faces challenges in effectively fusing information from diverse modalities, especially when modality quality varies across samples. Dynamic fusion strategies, such as attention mechanism in Transformers, aim to address such challenge by adaptively emphasizing modalities based on the characteristics of input data. However, through amounts of carefully designed experiments, we surprisingly observed that the dynamic adaptability of widely-used self-attention models diminishes. Model tends to prefer one modality regardless of data characteristics. This bias triggers a self-reinforcing cycle that progressively overemphasizes the favored modality, widening the distribution gap in attention keys across modalities and deactivating attention mechanism's dynamic properties. To revive adaptability, we propose a simple yet effective method Rolling Query (RollingQ), which balances attention allocation by rotating the query to break the self-reinforcing cycle and mitigate the key distribution gap. Extensive experiments on various multimodal scenarios validate the effectiveness of RollingQ and the restoration of cooperation dynamics is pivotal for enhancing the broader capabilities of widely deployed multimodal Transformers. The source code is available at https://github.com/GeWu-Lab/RollingQ_ICML2025.
LENVIZ: A High-Resolution Low-Exposure Night Vision Benchmark Dataset
Mar 25, 2025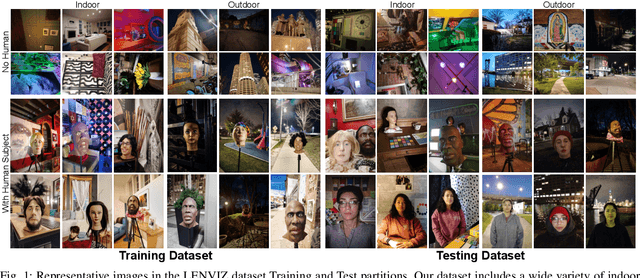
Low-light image enhancement is crucial for a myriad of applications, from night vision and surveillance, to autonomous driving. However, due to the inherent limitations that come in hand with capturing images in low-illumination environments, the task of enhancing such scenes still presents a formidable challenge. To advance research in this field, we introduce our Low Exposure Night Vision (LENVIZ) Dataset, a comprehensive multi-exposure benchmark dataset for low-light image enhancement comprising of over 230K frames showcasing 24K real-world indoor and outdoor, with-and without human, scenes. Captured using 3 different camera sensors, LENVIZ offers a wide range of lighting conditions, noise levels, and scene complexities, making it the largest publicly available up-to 4K resolution benchmark in the field. LENVIZ includes high quality human-generated ground truth, for which each multi-exposure low-light scene has been meticulously curated and edited by expert photographers to ensure optimal image quality. Furthermore, we also conduct a comprehensive analysis of current state-of-the-art low-light image enhancement techniques on our dataset and highlight potential areas of improvement.