 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMERLION: Marine ExploRation with Language guIded Online iNformative Visual Sampling and Enhancement
Mar 10, 2025Autonomous and targeted underwater visual monitoring and exploration using Autonomous Underwater Vehicles (AUVs) can be a challenging task due to both online and offline constraints. The online constraints comprise limited onboard storage capacity and communication bandwidth to the surface, whereas the offline constraints entail the time and effort required for the selection of desired key frames from the video data. An example use case of targeted underwater visual monitoring is finding the most interesting visual frames of fish in a long sequence of an AUV's visual experience. This challenge of targeted informative sampling is further aggravated in murky waters with poor visibility. In this paper, we present MERLION, a novel framework that provides semantically aligned and visually enhanced summaries for murky underwater marine environment monitoring and exploration. Specifically, our framework integrates (a) an image-text model for semantically aligning the visual samples to the users' needs, (b) an image enhancement model for murky water visual data and (c) an informative sampler for summarizing the monitoring experience. We validate our proposed MERLION framework on real-world data with user studies and present qualitative and quantitative results using our evaluation metric and show improved results compared to the state-of-the-art approaches. We have open-sourced the code for MERLION at the following link https://github.com/MARVL-Lab/MERLION.git.
Robot Guided Evacuation with Viewpoint Constraints
Sep 28, 2024
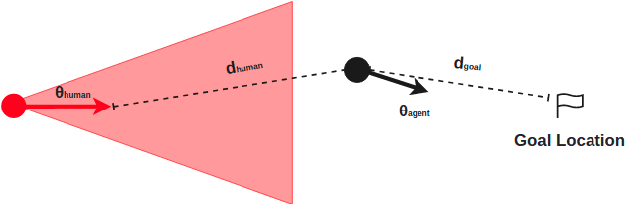
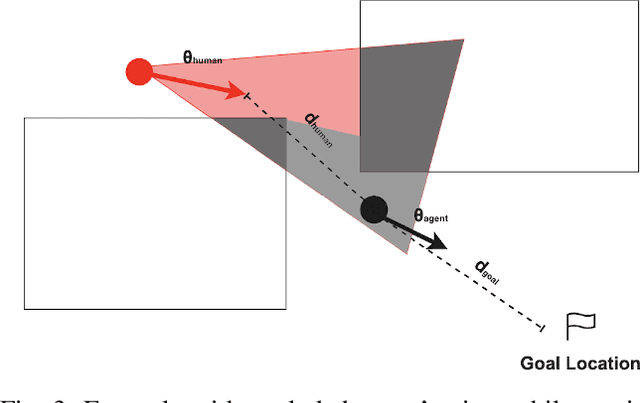
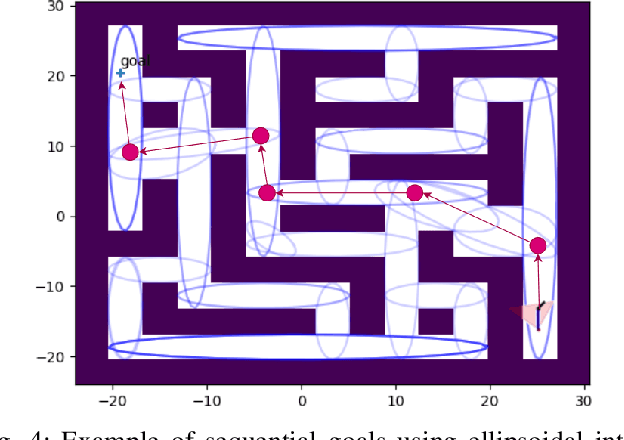
We present a viewpoint-based non-linear Model Predictive Control (MPC) for evacuation guiding robots. Specifically, the proposed MPC algorithm enables evacuation guiding robots to track and guide cooperative human targets in emergency scenarios. Our algorithm accounts for the environment layout as well as distances between the robot and human target and distance to the goal location. A key challenge for evacuation guiding robot is the trade-off between its planned motion for leading the target toward a goal position and staying in the target's viewpoint while maintaining line-of-sight for guiding. We illustrate the effectiveness of our proposed evacuation guiding algorithm in both simulated and real-world environments with an Unmanned Aerial Vehicle (UAV) guiding a human. Our results suggest that using the contextual information from the environment for motion planning, increases the visibility of the guiding UAV to the human while achieving faster total evacuation time.
Online Informative Sampling using Semantic Features in Underwater Environments
Feb 06, 2024The underwater world remains largely unexplored, with Autonomous Underwater Vehicles (AUVs) playing a crucial role in sub-sea explorations. However, continuous monitoring of underwater environments using AUVs can generate a significant amount of data. In addition, sending live data feed from an underwater environment requires dedicated on-board data storage options for AUVs which can hinder requirements of other higher priority tasks. Informative sampling techniques offer a solution by condensing observations. In this paper, we present a semantically-aware online informative sampling (ON-IS) approach which samples an AUV's visual experience in real-time. Specifically, we obtain visual features from a fine-tuned object detection model to align the sampling outcomes with the desired semantic information. Our contributions are (a) a novel Semantic Online Informative Sampling (SON-IS) algorithm, (b) a user study to validate the proposed approach and (c) a novel evaluation metric to score our proposed algorithm with respect to the suggested samples by human subjects
Evaluating Visual Odometry Methods for Autonomous Driving in Rain
Sep 11, 2023



The increasing demand for autonomous vehicles has created a need for robust navigation systems that can also operate effectively in adverse weather conditions. Visual odometry is a technique used in these navigation systems, enabling the estimation of vehicle position and motion using input from onboard cameras. However, visual odometry accuracy can be significantly impacted in challenging weather conditions, such as heavy rain, snow, or fog. In this paper, we evaluate a range of visual odometry methods, including our DROIDSLAM based heuristic approach. Specifically, these algorithms are tested on both clear and rainy weather urban driving data to evaluate their robustness. We compiled a dataset comprising of a range of rainy weather conditions from different cities. This includes, the Oxford Robotcar dataset from Oxford, the 4Seasons dataset from Munich and an internal dataset collected in Singapore. We evaluated different visual odometry algorithms for both monocular and stereo camera setups using the Absolute Trajectory Error (ATE). Our evaluation suggests that the Depth and Flow for Visual Odometry (DF-VO) algorithm with monocular setup worked well for short range distances (< 500m) and our proposed DROID-SLAM based heuristic approach for the stereo setup performed relatively well for long-term localization. Both algorithms performed consistently well across all rain conditions.
Localization with Anticipation for Autonomous Urban Driving in Rain
Jun 15, 2023



This paper presents a localization algorithm for autonomous urban vehicles under rain weather conditions. In adverse weather, human drivers anticipate the location of the ego-vehicle based on the control inputs they provide and surrounding road contextual information. Similarly, in our approach for localization in rain weather, we use visual data, along with a global reference path and vehicle motion model for anticipating and better estimating the pose of the ego-vehicle in each frame. The global reference path contains useful road contextual information such as the angle of turn which can be potentially used to improve the localization accuracy especially when sensors are compromised. We experimented on the Oxford Robotcar Dataset and our internal dataset from Singapore to validate our localization algorithm in both clear and rain weather conditions. Our method improves localization accuracy by 50.83% in rain weather and 34.32% in clear weather when compared to baseline algorithms.