 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobot Guided Evacuation with Viewpoint Constraints
Paper and Code
Sep 28, 2024
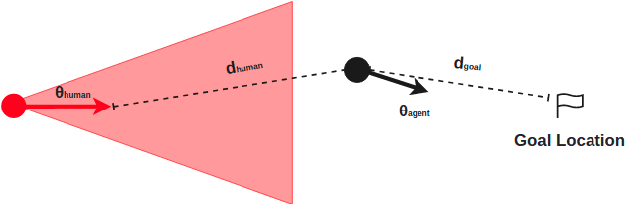
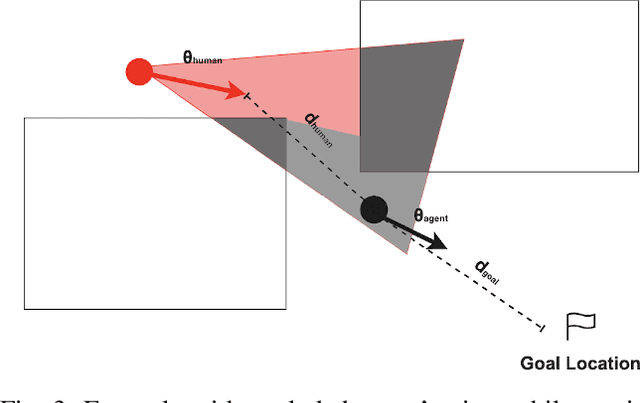
We present a viewpoint-based non-linear Model Predictive Control (MPC) for evacuation guiding robots. Specifically, the proposed MPC algorithm enables evacuation guiding robots to track and guide cooperative human targets in emergency scenarios. Our algorithm accounts for the environment layout as well as distances between the robot and human target and distance to the goal location. A key challenge for evacuation guiding robot is the trade-off between its planned motion for leading the target toward a goal position and staying in the target's viewpoint while maintaining line-of-sight for guiding. We illustrate the effectiveness of our proposed evacuation guiding algorithm in both simulated and real-world environments with an Unmanned Aerial Vehicle (UAV) guiding a human. Our results suggest that using the contextual information from the environment for motion planning, increases the visibility of the guiding UAV to the human while achieving faster total evacuation time.