 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning to Assist Different Wearers in Multitasks: Efficient and Individualized Human-In-the-Loop Adaption Framework for Exoskeleton Robots
Paper and Code
Sep 26, 2023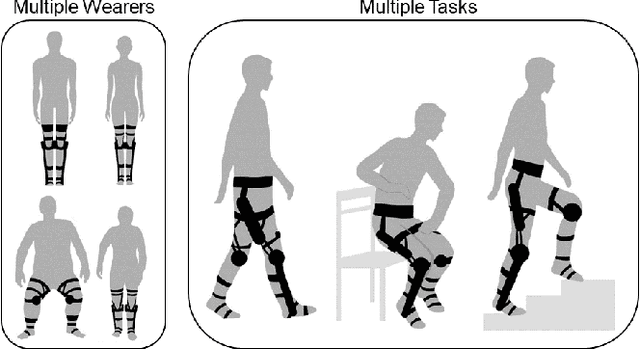
One of the typical purposes of using lower-limb exoskeleton robots is to provide assistance to the wearer by supporting their weight and augmenting their physical capabilities according to a given task and human motion intentions. The generalizability of robots across different wearers in multiple tasks is important to ensure that the robot can provide correct and effective assistance in actual implementation. However, most lower-limb exoskeleton robots exhibit only limited generalizability. Therefore, this paper proposes a human-in-the-loop learning and adaptation framework for exoskeleton robots to improve their performance in various tasks and for different wearers. To suit different wearers, an individualized walking trajectory is generated online using dynamic movement primitives and Bayes optimization. To accommodate various tasks, a task translator is constructed using a neural network to generalize a trajectory to more complex scenarios. These generalization techniques are integrated into a unified variable impedance model, which regulates the exoskeleton to provide assistance while ensuring safety. In addition, an anomaly detection network is developed to quantitatively evaluate the wearer's comfort, which is considered in the trajectory learning procedure and contributes to the relaxation of conflicts in impedance control. The proposed framework is easy to implement, because it requires proprioceptive sensors only to perform and deploy data-efficient learning schemes. This makes the exoskeleton practical for deployment in complex scenarios, accommodating different walking patterns, habits, tasks, and conflicts. Experiments and comparative studies on a lower-limb exoskeleton robot are performed to demonstrate the effectiveness of the proposed framework.