 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Semantic-Aware Framework for Safe and Intent-Integrative Assistance in Upper-Limb Exoskeletons
Aug 14, 2025Upper-limb exoskeletons are primarily designed to provide assistive support by accurately interpreting and responding to human intentions. In home-care scenarios, exoskeletons are expected to adapt their assistive configurations based on the semantic information of the task, adjusting appropriately in accordance with the nature of the object being manipulated. However, existing solutions often lack the ability to understand task semantics or collaboratively plan actions with the user, limiting their generalizability. To address this challenge, this paper introduces a semantic-aware framework that integrates large language models into the task planning framework, enabling the delivery of safe and intent-integrative assistance. The proposed approach begins with the exoskeleton operating in transparent mode to capture the wearer's intent during object grasping. Once semantic information is extracted from the task description, the system automatically configures appropriate assistive parameters. In addition, a diffusion-based anomaly detector is used to continuously monitor the state of human-robot interaction and trigger real-time replanning in response to detected anomalies. During task execution, online trajectory refinement and impedance control are used to ensure safety and regulate human-robot interaction. Experimental results demonstrate that the proposed method effectively aligns with the wearer's cognition, adapts to semantically varying tasks, and responds reliably to anomalies.
Flow-Aware Navigation of Magnetic Micro-Robots in Complex Fluids via PINN-Based Prediction
Mar 14, 2025While magnetic micro-robots have demonstrated significant potential across various applications, including drug delivery and microsurgery, the open issue of precise navigation and control in complex fluid environments is crucial for in vivo implementation. This paper introduces a novel flow-aware navigation and control strategy for magnetic micro-robots that explicitly accounts for the impact of fluid flow on their movement. First, the proposed method employs a Physics-Informed U-Net (PI-UNet) to refine the numerically predicted fluid velocity using local observations. Then, the predicted velocity is incorporated in a flow-aware A* path planning algorithm, ensuring efficient navigation while mitigating flow-induced disturbances. Finally, a control scheme is developed to compensate for the predicted fluid velocity, thereby optimizing the micro-robot's performance. A series of simulation studies and real-world experiments are conducted to validate the efficacy of the proposed approach. This method enhances both planning accuracy and control precision, expanding the potential applications of magnetic micro-robots in fluid-affected environments typical of many medical scenarios.
Non-contact Dexterous Micromanipulation with Multiple Optoelectronic Robots
Oct 30, 2024



Micromanipulation systems leverage automation and robotic technologies to improve the precision, repeatability, and efficiency of various tasks at the microscale. However, current approaches are typically limited to specific objects or tasks, which necessitates the use of custom tools and specialized grasping methods. This paper proposes a novel non-contact micromanipulation method based on optoelectronic technologies. The proposed method utilizes repulsive dielectrophoretic forces generated in the optoelectronic field to drive a microrobot, enabling the microrobot to push the target object in a cluttered environment without physical contact. The non-contact feature can minimize the risks of potential damage, contamination, or adhesion while largely improving the flexibility of manipulation. The feature enables the use of a general tool for indirect object manipulation, eliminating the need for specialized tools. A series of simulation studies and real-world experiments -- including non-contact trajectory tracking, obstacle avoidance, and reciprocal avoidance between multiple microrobots -- are conducted to validate the performance of the proposed method. The proposed formulation provides a general and dexterous solution for a range of objects and tasks at the micro scale.
Upper-Limb Rehabilitation with a Dual-Mode Individualized Exoskeleton Robot: A Generative-Model-Based Solution
Sep 05, 2024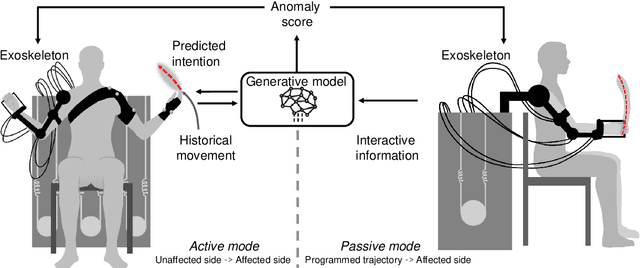
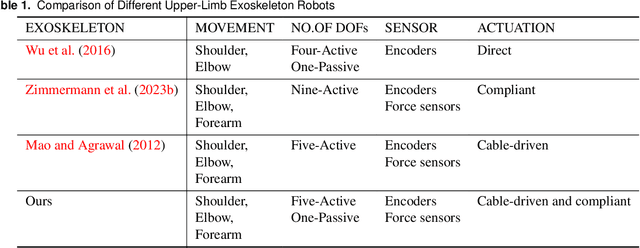
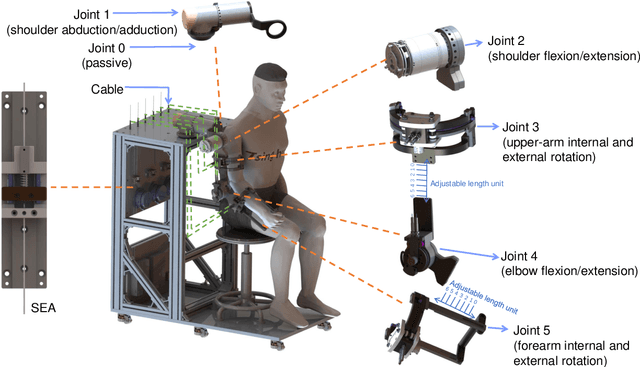
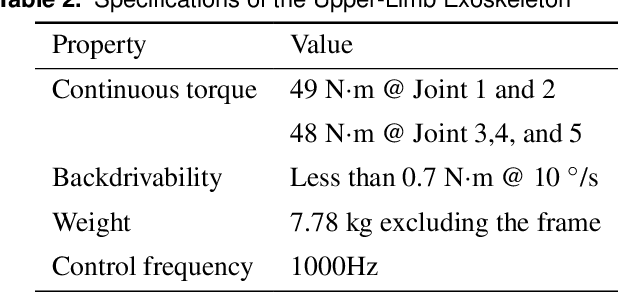
Several upper-limb exoskeleton robots have been developed for stroke rehabilitation, but their rather low level of individualized assistance typically limits their effectiveness and practicability. Individualized assistance involves an upper-limb exoskeleton robot continuously assessing feedback from a stroke patient and then meticulously adjusting interaction forces to suit specific conditions and online changes. This paper describes the development of a new upper-limb exoskeleton robot with a novel online generative capability that allows it to provide individualized assistance to support the rehabilitation training of stroke patients. Specifically, the upper-limb exoskeleton robot exploits generative models to customize the fine and fit trajectory for the patient, as medical conditions, responses, and comfort feedback during training generally differ between patients. This generative capability is integrated into the two working modes of the upper-limb exoskeleton robot: an active mirroring mode for patients who retain motor abilities on one side of the body and a passive following mode for patients who lack motor ability on both sides of the body. The performance of the upper-limb exoskeleton robot was illustrated in experiments involving healthy subjects and stroke patients.
Efficient Model Learning and Adaptive Tracking Control of Magnetic Micro-Robots for Non-Contact Manipulation
Mar 21, 2024



Magnetic microrobots can be navigated by an external magnetic field to autonomously move within living organisms with complex and unstructured environments. Potential applications include drug delivery, diagnostics, and therapeutic interventions. Existing techniques commonly impart magnetic properties to the target object,or drive the robot to contact and then manipulate the object, both probably inducing physical damage. This paper considers a non-contact formulation, where the robot spins to generate a repulsive field to push the object without physical contact. Under such a formulation, the main challenge is that the motion model between the input of the magnetic field and the output velocity of the target object is commonly unknown and difficult to analyze. To deal with it, this paper proposes a data-driven-based solution. A neural network is constructed to efficiently estimate the motion model. Then, an approximate model-based optimal control scheme is developed to push the object to track a time-varying trajectory, maintaining the non-contact with distance constraints. Furthermore, a straightforward planner is introduced to assess the adaptability of non-contact manipulation in a cluttered unstructured environment. Experimental results are presented to show the tracking and navigation performance of the proposed scheme.