 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBaichuan-M4: A Clinical-Grade Medical Agent System for Continuous Care
Jun 09, 2026Baichuan-M4 is Baichuan Intelligence's clinical-grade medical large model, designed for continuous care rather than single-turn medical question answering. It is built as a coordinated medical agent system around three pillars: Baichuan-Harness, a unified runtime that keeps reinforcement-learning training and real-world deployment consistent while enforcing action constraints, tool use, long-term patient memory, and multi-agent coordination; a core reasoning model trained with a continuous-care reinforcement-learning framework that integrates span-level reward modeling (SPAR++), reasoning-path compression, curriculum learning, and stabilized policy optimization; and a clinical tool layer for patient-memory management, authoritative evidence-based retrieval, and multimodal medical perception across documents, X-rays, and dermatology. On a cross-dimensional medical evaluation suite, Baichuan-M4 attains leading results in static medical knowledge and safety, dynamic OSCE-style consultation, long-context clinical memory, evidence-based retrieval, medical document OCR, and multimodal image understanding, while lowering the hallucination rate to 3.3%.
Artificial intelligence is creating a new global linguistic hierarchy
Feb 12, 2026Artificial intelligence (AI) has the potential to transform healthcare, education, governance and socioeconomic equity, but its benefits remain concentrated in a small number of languages (Bender, 2019; Blasi et al., 2022; Joshi et al., 2020; Ranathunga and de Silva, 2022; Young, 2015). Language AI - the technologies that underpin widely-used conversational systems such as ChatGPT - could provide major benefits if available in people's native languages, yet most of the world's 7,000+ linguistic communities currently lack access and face persistent digital marginalization. Here we present a global longitudinal analysis of social, economic and infrastructural conditions across languages to assess systemic inequalities in language AI. We first analyze the existence of AI resources for 6003 languages. We find that despite efforts of the community to broaden the reach of language technologies (Bapna et al., 2022; Costa-Jussà et al., 2022), the dominance of a handful of languages is exacerbating disparities on an unprecedented scale, with divides widening exponentially rather than narrowing. Further, we contrast the longitudinal diffusion of AI with that of earlier IT technologies, revealing a distinctive hype-driven pattern of spread. To translate our findings into practical insights and guide prioritization efforts, we introduce the Language AI Readiness Index (EQUATE), which maps the state of technological, socio-economic, and infrastructural prerequisites for AI deployment across languages. The index highlights communities where capacity exists but remains underutilized, and provides a framework for accelerating more equitable diffusion of language AI. Our work contributes to setting the baseline for a transition towards more sustainable and equitable language technologies.
Baichuan-M3: Modeling Clinical Inquiry for Reliable Medical Decision-Making
Feb 06, 2026We introduce Baichuan-M3, a medical-enhanced large language model engineered to shift the paradigm from passive question-answering to active, clinical-grade decision support. Addressing the limitations of existing systems in open-ended consultations, Baichuan-M3 utilizes a specialized training pipeline to model the systematic workflow of a physician. Key capabilities include: (i) proactive information acquisition to resolve ambiguity; (ii) long-horizon reasoning that unifies scattered evidence into coherent diagnoses; and (iii) adaptive hallucination suppression to ensure factual reliability. Empirical evaluations demonstrate that Baichuan-M3 achieves state-of-the-art results on HealthBench, the newly introduced HealthBench-Hallu and ScanBench, significantly outperforming GPT-5.2 in clinical inquiry, advisory and safety. The models are publicly available at https://huggingface.co/collections/baichuan-inc/baichuan-m3.
Accelerating Decentralized Optimization via Overlapping Local Steps
Jan 04, 2026Decentralized optimization has emerged as a critical paradigm for distributed learning, enabling scalable training while preserving data privacy through peer-to-peer collaboration. However, existing methods often suffer from communication bottlenecks due to frequent synchronization between nodes. We present Overlapping Local Decentralized SGD (OLDSGD), a novel approach to accelerate decentralized training by computation-communication overlapping, significantly reducing network idle time. With a deliberately designed update, OLDSGD preserves the same average update as Local SGD while avoiding communication-induced stalls. Theoretically, we establish non-asymptotic convergence rates for smooth non-convex objectives, showing that OLDSGD retains the same iteration complexity as standard Local Decentralized SGD while improving per-iteration runtime. Empirical results demonstrate OLDSGD's consistent improvements in wall-clock time convergence under different levels of communication delays. With minimal modifications to existing frameworks, OLDSGD offers a practical solution for faster decentralized learning without sacrificing theoretical guarantees.
HGS: Hybrid Gaussian Splatting with Static-Dynamic Decomposition for Compact Dynamic View Synthesis
Dec 16, 2025Dynamic novel view synthesis (NVS) is essential for creating immersive experiences. Existing approaches have advanced dynamic NVS by introducing 3D Gaussian Splatting (3DGS) with implicit deformation fields or indiscriminately assigned time-varying parameters, surpassing NeRF-based methods. However, due to excessive model complexity and parameter redundancy, they incur large model sizes and slow rendering speeds, making them inefficient for real-time applications, particularly on resource-constrained devices. To obtain a more efficient model with fewer redundant parameters, in this paper, we propose Hybrid Gaussian Splatting (HGS), a compact and efficient framework explicitly designed to disentangle static and dynamic regions of a scene within a unified representation. The core innovation of HGS lies in our Static-Dynamic Decomposition (SDD) strategy, which leverages Radial Basis Function (RBF) modeling for Gaussian primitives. Specifically, for dynamic regions, we employ time-dependent RBFs to effectively capture temporal variations and handle abrupt scene changes, while for static regions, we reduce redundancy by sharing temporally invariant parameters. Additionally, we introduce a two-stage training strategy tailored for explicit models to enhance temporal coherence at static-dynamic boundaries. Experimental results demonstrate that our method reduces model size by up to 98% and achieves real-time rendering at up to 125 FPS at 4K resolution on a single RTX 3090 GPU. It further sustains 160 FPS at 1352 * 1014 on an RTX 3050 and has been integrated into the VR system. Moreover, HGS achieves comparable rendering quality to state-of-the-art methods while providing significantly improved visual fidelity for high-frequency details and abrupt scene changes.
MSRS: Evaluating Multi-Source Retrieval-Augmented Generation
Aug 28, 2025Retrieval-augmented systems are typically evaluated in settings where information required to answer the query can be found within a single source or the answer is short-form or factoid-based. However, many real-world applications demand the ability to integrate and summarize information scattered across multiple sources, where no single source is sufficient to respond to the user's question. In such settings, the retrieval component of a RAG pipeline must recognize a variety of relevance signals, and the generation component must connect and synthesize information across multiple sources. We present a scalable framework for constructing evaluation benchmarks that challenge RAG systems to integrate information across distinct sources and generate long-form responses. Using our framework, we build two new benchmarks on Multi-Source Retrieval and Synthesis: MSRS-Story and MSRS-Meet, representing narrative synthesis and summarization tasks, respectively, that require retrieval from large collections. Our extensive experiments with various RAG pipelines -- including sparse and dense retrievers combined with frontier LLMs -- reveal that generation quality is highly dependent on retrieval effectiveness, which varies greatly by task. While multi-source synthesis proves challenging even in an oracle retrieval setting, we find that reasoning models significantly outperform standard LLMs at this distinct step.
Asynchronous Decentralized SGD under Non-Convexity: A Block-Coordinate Descent Framework
May 15, 2025Decentralized optimization has become vital for leveraging distributed data without central control, enhancing scalability and privacy. However, practical deployments face fundamental challenges due to heterogeneous computation speeds and unpredictable communication delays. This paper introduces a refined model of Asynchronous Decentralized Stochastic Gradient Descent (ADSGD) under practical assumptions of bounded computation and communication times. To understand the convergence of ADSGD, we first analyze Asynchronous Stochastic Block Coordinate Descent (ASBCD) as a tool, and then show that ADSGD converges under computation-delay-independent step sizes. The convergence result is established without assuming bounded data heterogeneity. Empirical experiments reveal that ADSGD outperforms existing methods in wall-clock convergence time across various scenarios. With its simplicity, efficiency in memory and communication, and resilience to communication and computation delays, ADSGD is well-suited for real-world decentralized learning tasks.
ReSearch: Learning to Reason with Search for LLMs via Reinforcement Learning
Mar 27, 2025



Large Language Models (LLMs) have shown remarkable capabilities in reasoning, exemplified by the success of OpenAI-o1 and DeepSeek-R1. However, integrating reasoning with external search processes remains challenging, especially for complex multi-hop questions requiring multiple retrieval steps. We propose ReSearch, a novel framework that trains LLMs to Reason with Search via reinforcement learning without using any supervised data on reasoning steps. Our approach treats search operations as integral components of the reasoning chain, where when and how to perform searches is guided by text-based thinking, and search results subsequently influence further reasoning. We train ReSearch on Qwen2.5-7B(-Instruct) and Qwen2.5-32B(-Instruct) models and conduct extensive experiments. Despite being trained on only one dataset, our models demonstrate strong generalizability across various benchmarks. Analysis reveals that ReSearch naturally elicits advanced reasoning capabilities such as reflection and self-correction during the reinforcement learning process.
Baichuan-Omni-1.5 Technical Report
Jan 26, 2025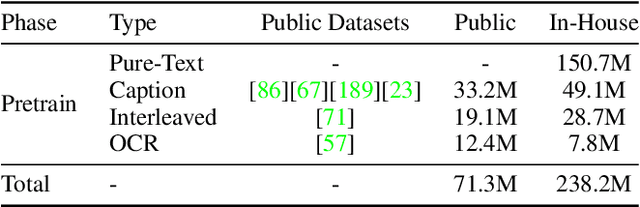
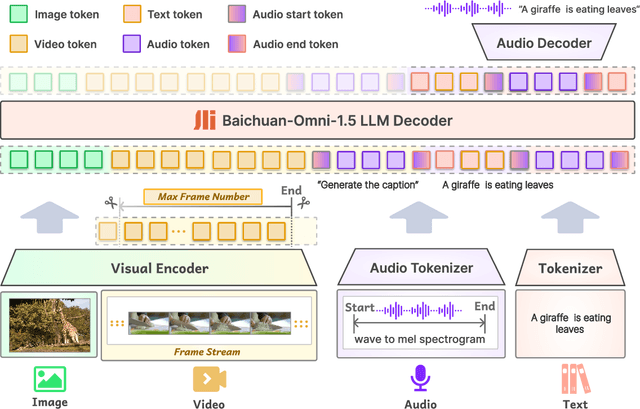
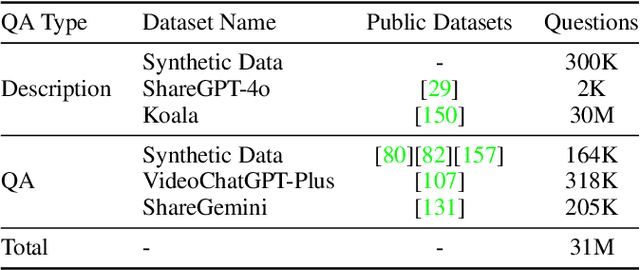
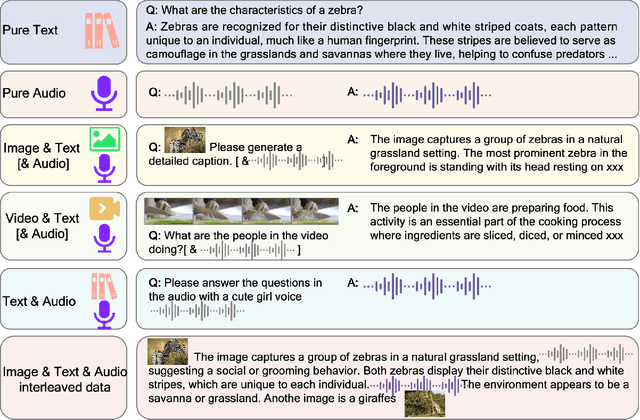
We introduce Baichuan-Omni-1.5, an omni-modal model that not only has omni-modal understanding capabilities but also provides end-to-end audio generation capabilities. To achieve fluent and high-quality interaction across modalities without compromising the capabilities of any modality, we prioritized optimizing three key aspects. First, we establish a comprehensive data cleaning and synthesis pipeline for multimodal data, obtaining about 500B high-quality data (text, audio, and vision). Second, an audio-tokenizer (Baichuan-Audio-Tokenizer) has been designed to capture both semantic and acoustic information from audio, enabling seamless integration and enhanced compatibility with MLLM. Lastly, we designed a multi-stage training strategy that progressively integrates multimodal alignment and multitask fine-tuning, ensuring effective synergy across all modalities. Baichuan-Omni-1.5 leads contemporary models (including GPT4o-mini and MiniCPM-o 2.6) in terms of comprehensive omni-modal capabilities. Notably, it achieves results comparable to leading models such as Qwen2-VL-72B across various multimodal medical benchmarks.
Baichuan Alignment Technical Report
Oct 19, 2024



We introduce Baichuan Alignment, a detailed analysis of the alignment techniques employed in the Baichuan series of models. This represents the industry's first comprehensive account of alignment methodologies, offering valuable insights for advancing AI research. We investigate the critical components that enhance model performance during the alignment process, including optimization methods, data strategies, capability enhancements, and evaluation processes. The process spans three key stages: Prompt Augmentation System (PAS), Supervised Fine-Tuning (SFT), and Preference Alignment. The problems encountered, the solutions applied, and the improvements made are thoroughly recorded. Through comparisons across well-established benchmarks, we highlight the technological advancements enabled by Baichuan Alignment. Baichuan-Instruct is an internal model, while Qwen2-Nova-72B and Llama3-PBM-Nova-70B are instruct versions of the Qwen2-72B and Llama-3-70B base models, optimized through Baichuan Alignment. Baichuan-Instruct demonstrates significant improvements in core capabilities, with user experience gains ranging from 17% to 28%, and performs exceptionally well on specialized benchmarks. In open-source benchmark evaluations, both Qwen2-Nova-72B and Llama3-PBM-Nova-70B consistently outperform their respective official instruct versions across nearly all datasets. This report aims to clarify the key technologies behind the alignment process, fostering a deeper understanding within the community. Llama3-PBM-Nova-70B model is available at https://huggingface.co/PKU-Baichuan-MLSystemLab/Llama3-PBM-Nova-70B.