 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInference-Time Robot Behavior Steering through Physically-Aware Reconfiguration of Task-Structure
Jun 25, 2026A central challenge in deploying learned robot policies is inference-time behavior steering: redirecting a policy at test time to satisfy user preferences not anticipated during training, without retraining. Existing methods fail in two modes: end-to-end methods require fine-tuning or expert-level guidance, while neuro-symbolic methods rely on predefined symbols whose edits can result in logically reasonable but physically infeasible plans. To address this challenge, we propose ReStruct, which builds upon a neural automaton policy that decomposes a visuomotor policy into a high-level state-machine skeleton capturing task structure and a low-level continuous controller represented as a residual policy. Specifically, ReStruct adopts the automaton to represent the preference and incorporates it into the skeleton through a synchronous product, thereby reconfiguring the task structure. With the controller kept frozen, the action priors provided by the skeleton are updated accordingly to enable physically-aware control under a modified task structure. Extensive experiments from simulation and real-world show that ReStruct steers a wide range of preferences, from object-centric specifications to temporal-logic constraints, and after steering surpasses existing methods, exceeding VLA models in both task success and preference-following by up to 25%.
VLESA: Vision-Language Embodied Safety Agent for Human Activity Monitoring
Jun 02, 2026As AI systems increasingly assist humans in physical tasks, ensuring safety becomes paramount -- physical actions carry immediate and irreversible consequences that digital errors do not. We introduce the Vision-Language Embodied Safety Agent (VLESA), a framework that monitors human activities from egocentric video and triggers real-time safety interventions when dangerous actions are predicted. VLESA addresses intent-dependent safety where identical actions can be safe or dangerous depending on context. A dataset pairing egocentric frames with goal-conditioned safety annotations is introduced, enabling a goal-conditioned safety Q-filter trained via GRPO that evaluates actions with respect to inferred intent without retraining. On top of that, an intent-action prediction agent is proposed to jointly infer goals and predict future actions from video. On the ASIMOV-2.0 benchmark, VLESA achieves higher intervention accuracy at the exact ground-truth frame compared to baselines, while the GRPO-trained Q-filter improves action safety by over 41 percentage points through goal-conditioned constrained decoding. Code is available at https://github.com/HanjiangHu/VLESA.
Emergent Neural Automaton Policies: Learning Symbolic Structure from Visuomotor Trajectories
Mar 26, 2026Scaling robot learning to long-horizon tasks remains a formidable challenge. While end-to-end policies often lack the structural priors needed for effective long-term reasoning, traditional neuro-symbolic methods rely heavily on hand-crafted symbolic priors. To address the issue, we introduce ENAP (Emergent Neural Automaton Policy), a framework that allows a bi-level neuro-symbolic policy adaptively emerge from visuomotor demonstrations. Specifically, we first employ adaptive clustering and an extension of the L* algorithm to infer a Mealy state machine from visuomotor data, which serves as an interpretable high-level planner capturing latent task modes. Then, this discrete structure guides a low-level reactive residual network to learn precise continuous control via behavior cloning (BC). By explicitly modeling the task structure with discrete transitions and continuous residuals, ENAP achieves high sample efficiency and interpretability without requiring task-specific labels. Extensive experiments on complex manipulation and long-horizon tasks demonstrate that ENAP outperforms state-of-the-art (SoTA) end-to-end VLA policies by up to 27% in low-data regimes, while offering a structured representation of robotic intent (Fig. 1).
Hierarchical Temporal Logic Task and Motion Planning for Multi-Robot Systems
Apr 29, 2025Task and motion planning (TAMP) for multi-robot systems, which integrates discrete task planning with continuous motion planning, remains a challenging problem in robotics. Existing TAMP approaches often struggle to scale effectively for multi-robot systems with complex specifications, leading to infeasible solutions and prolonged computation times. This work addresses the TAMP problem in multi-robot settings where tasks are specified using expressive hierarchical temporal logic and task assignments are not pre-determined. Our approach leverages the efficiency of hierarchical temporal logic specifications for task-level planning and the optimization-based graph of convex sets method for motion-level planning, integrating them within a product graph framework. At the task level, we convert hierarchical temporal logic specifications into a single graph, embedding task allocation within its edges. At the motion level, we represent the feasible motions of multiple robots through convex sets in the configuration space, guided by a sampling-based motion planner. This formulation allows us to define the TAMP problem as a shortest path search within the product graph, where efficient convex optimization techniques can be applied. We prove that our approach is both sound and complete under mild assumptions. Additionally, we extend our framework to cooperative pick-and-place tasks involving object handovers between robots. We evaluate our method across various high-dimensional multi-robot scenarios, including simulated and real-world environments with quadrupeds, robotic arms, and automated conveyor systems. Our results show that our approach outperforms existing methods in execution time and solution optimality while effectively scaling with task complexity.
Scaling Up Natural Language Understanding for Multi-Robots Through the Lens of Hierarchy
Aug 15, 2024



Long-horizon planning is hindered by challenges such as uncertainty accumulation, computational complexity, delayed rewards and incomplete information. This work proposes an approach to exploit the task hierarchy from human instructions to facilitate multi-robot planning. Using Large Language Models (LLMs), we propose a two-step approach to translate multi-sentence instructions into a structured language, Hierarchical Linear Temporal Logic (LTL), which serves as a formal representation for planning. Initially, LLMs transform the instructions into a hierarchical representation defined as Hierarchical Task Tree, capturing the logical and temporal relations among tasks. Following this, a domain-specific fine-tuning of LLM translates sub-tasks of each task into flat LTL formulas, aggregating them to form hierarchical LTL specifications. These specifications are then leveraged for planning using off-the-shelf planners. Our framework not only bridges the gap between instructions and algorithmic planning but also showcases the potential of LLMs in harnessing hierarchical reasoning to automate multi-robot task planning. Through evaluations in both simulation and real-world experiments involving human participants, we demonstrate that our method can handle more complex instructions compared to existing methods. The results indicate that our approach achieves higher success rates and lower costs in multi-robot task allocation and plan generation. Demos videos are available at https://youtu.be/7WOrDKxIMIs .
Certifying Robustness of Learning-Based Keypoint Detection and Pose Estimation Methods
Jul 31, 2024



This work addresses the certification of the local robustness of vision-based two-stage 6D object pose estimation. The two-stage method for object pose estimation achieves superior accuracy by first employing deep neural network-driven keypoint regression and then applying a Perspective-n-Point (PnP) technique. Despite advancements, the certification of these methods' robustness remains scarce. This research aims to fill this gap with a focus on their local robustness on the system level--the capacity to maintain robust estimations amidst semantic input perturbations. The core idea is to transform the certification of local robustness into neural network verification for classification tasks. The challenge is to develop model, input, and output specifications that align with off-the-shelf verification tools. To facilitate verification, we modify the keypoint detection model by substituting nonlinear operations with those more amenable to the verification processes. Instead of injecting random noise into images, as is common, we employ a convex hull representation of images as input specifications to more accurately depict semantic perturbations. Furthermore, by conducting a sensitivity analysis, we propagate the robustness criteria from pose to keypoint accuracy, and then formulating an optimal error threshold allocation problem that allows for the setting of a maximally permissible keypoint deviation thresholds. Viewing each pixel as an individual class, these thresholds result in linear, classification-akin output specifications. Under certain conditions, we demonstrate that the main components of our certification framework are both sound and complete, and validate its effects through extensive evaluations on realistic perturbations. To our knowledge, this is the first study to certify the robustness of large-scale, keypoint-based pose estimation given images in real-world scenarios.
ModelVerification.jl: a Comprehensive Toolbox for Formally Verifying Deep Neural Networks
Jun 30, 2024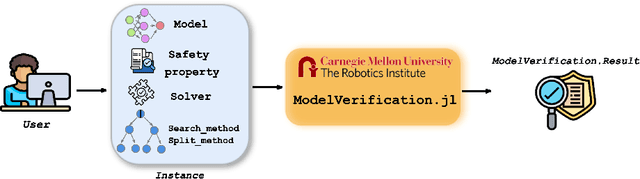
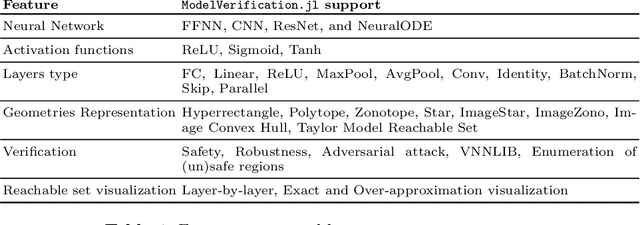
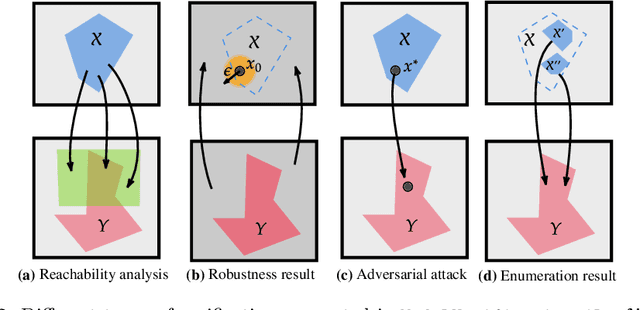
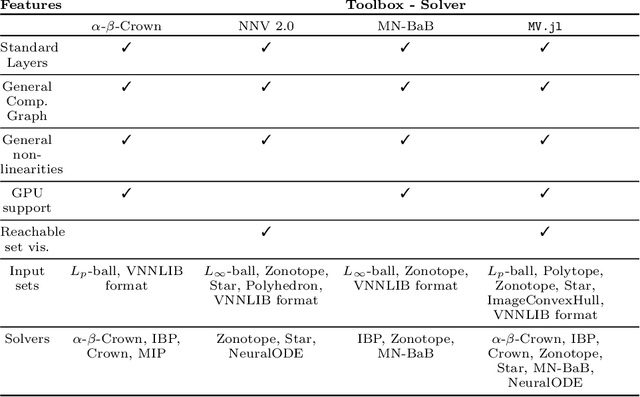
Deep Neural Networks (DNN) are crucial in approximating nonlinear functions across diverse applications, ranging from image classification to control. Verifying specific input-output properties can be a highly challenging task due to the lack of a single, self-contained framework that allows a complete range of verification types. To this end, we present \texttt{ModelVerification.jl (MV)}, the first comprehensive, cutting-edge toolbox that contains a suite of state-of-the-art methods for verifying different types of DNNs and safety specifications. This versatile toolbox is designed to empower developers and machine learning practitioners with robust tools for verifying and ensuring the trustworthiness of their DNN models.
Simultaneous Task Allocation and Planning for Multi-Robots under Hierarchical Temporal Logic Specifications
Jan 12, 2024



Past research into robotic planning with temporal logic specifications, notably Linear Temporal Logic (LTL), was largely based on singular formulas for individual or groups of robots. But with increasing task complexity, LTL formulas unavoidably grow lengthy, complicating interpretation and specification generation, and straining the computational capacities of the planners. By leveraging the intrinsic structure of tasks, we introduced a hierarchical structure to LTL specifications with requirements on syntax and semantics, and proved that they are more expressive than their flat counterparts. Second, we employ a search-based approach to synthesize plans for a multi-robot system, accomplishing simultaneous task allocation and planning. The search space is approximated by loosely interconnected sub-spaces, with each sub-space corresponding to one LTL specification. The search is predominantly confined to a single sub-space, transitioning to another sub-space under certain conditions, determined by the decomposition of automatons. Moreover, multiple heuristics are formulated to expedite the search significantly. A theoretical analysis concerning completeness and optimality is conducted under mild assumptions. When compared with existing methods on service tasks, our method outperforms in terms of execution times with comparable solution quality. Finally, scalability is evaluated by testing a group of 30 robots and achieving reasonable runtimes.
Simulation-aided Learning from Demonstration for Robotic LEGO Construction
Sep 24, 2023Recent advancements in manufacturing have a growing demand for fast, automatic prototyping (i.e. assembly and disassembly) capabilities to meet users' needs. This paper studies automatic rapid LEGO prototyping, which is devoted to constructing target LEGO objects that satisfy individual customization needs and allow users to freely construct their novel designs. A construction plan is needed in order to automatically construct the user-specified LEGO design. However, a freely designed LEGO object might not have an existing construction plan, and generating such a LEGO construction plan requires a non-trivial effort since it requires accounting for numerous constraints (e.g. object shape, colors, stability, etc.). In addition, programming the prototyping skill for the robot requires the users to have expert programming skills, which makes the task beyond the reach of the general public. To address the challenges, this paper presents a simulation-aided learning from demonstration (SaLfD) framework for easily deploying LEGO prototyping capability to robots. In particular, the user demonstrates constructing the customized novel LEGO object. The robot extracts the task information by observing the human operation and generates the construction plan. A simulation is developed to verify the correctness of the learned construction plan and the resulting LEGO prototype. The proposed system is deployed to a FANUC LR-mate 200id/7L robot. Experiments demonstrate that the proposed SaLfD framework can effectively correct and learn the prototyping (i.e. assembly and disassembly) tasks from human demonstrations. And the learned prototyping tasks are realized by the FANUC robot.
Robotic Planning under Hierarchical Temporal Logic Specifications
Aug 20, 2023Past research into robotic planning with temporal logic specifications, notably Linear Temporal Logic (LTL), was largely based on singular formulas for individual or groups of robots. But with increasing task complexity, LTL formulas unavoidably grow lengthy, complicating interpretation and specification generation, and straining the computational capacities of the planners. In order to maximize the potential of LTL specifications, we capitalized on the intrinsic structure of tasks and introduced a hierarchical structure to LTL specifications. In contrast to the "flat" structure, our hierarchical model has multiple levels of compositional specifications and offers benefits such as greater syntactic brevity, improved interpretability, and more efficient planning. To address tasks under this hierarchical temporal logic structure, we formulated a decomposition-based method. Each specification is first broken down into a range of temporally interrelated sub-tasks. We further mine the temporal relations among the sub-tasks of different specifications within the hierarchy. Subsequently, a Mixed Integer Linear Program is utilized to generate a spatio-temporal plan for each robot. Our hierarchical LTL specifications were experimentally applied to domains of robotic navigation and manipulation. Results from extensive simulation studies illustrated both the enhanced expressive potential of the hierarchical form and the efficacy of the proposed method.